一种多能源电力推进船舶能量管理策略辅助决策方法
本发明涉及船舶能量管理,具体涉及一种多能源电力推进船舶能量管理策略辅助决策方法。
背景技术:
1、随着全球低碳化进程的不断推进,造船业也加快了其电气化转型的速度。目前,电力推进技术使得电能成为了全船设备的纽带,综合电力系统将船舶电源、推进系统、通信与导航设备、电气负载等装置联结为一个整体,船舶的电气化程度正在加深。在光伏发电设备、储能设备等新型装置上船应用后,船舶的电能生产与使用方式得到了极大丰富,新型的多能源船舶进一步地降低了其在航行过程中的燃油消耗和污染排放情况。为了在完成预期航行任务和保证船舶的动力供应的前提下,降低航行过程中的运营成本以及减少污染排放,则需要充分地协调电网中各分布式电源的工作状态,即为船舶制定适宜的能量管理策略。
2、能量管理策略的制定方式可分为两类,实时优化和全局优化。前者将根据船舶电力系统当前时刻的状态即时地制定能量管理策略,而后者会针对整个航行区间,全盘考虑船舶在现在及未来每个时刻的能量管理策略。二者的区别在于,全局优化时需对船舶未来航行状态做出预测,并得到总体评价更好的能量管理策略;但实时优化仅考虑当前瞬时的能量管理策略的制定,而且整个航行区间内实时优化结果的累加并不等同于采用全局优化方式所得到的结果。因此在船舶能量管理策略的制定过程中,采用实时优化方式得到的能量管理策略可直接用于实践;但受限于无法避免的预测精度问题,采用全局优化方式得到的能量管理策略更适宜作为辅助决策手段,便于相关人员进行实际决策。
3、船舶在实际应用中将长时间将处于一种孤岛状态,无法便利地在非港口海域上接收物资补给,船舶电力系统所生产的电能应被用电负载100%消耗,而不是如同陆地电网一般,允许大量冗余电能。在船舶电力系统纳入储能设备后,随之而来的问题是,其所生产的冗余电能可被存储并以作后用,进一步提高了船舶能量管理策略制定时的复杂程度。
4、在当前关于电力推进船舶的能量管理策略的全局优化的现有资料文献中,电力推进船舶同时配备了多种能量来源形式的发电装置以及储能装置的研究较少。并且现有方法所针对的主要为早期低电气化船舶,所解决问题相对简单,而在面对新型船舶的能量管理需求时,难以作为此类复杂、高维、非线性的优化问题的解决方案,缺乏实际应用价值。
技术实现思路
1、本发明提供了一种多能源电力推进船舶能量管理策略辅助决策方法,以解决现有技术中传统机械动力船舶能量管理方法不适用电力推进船舶的问题。
2、本发明提供了一种多能源电力推进船舶能量管理策略辅助决策方法,包括如下步骤:
3、步骤1:采集船舶电力系统中各个设备的机器参数以及负载侧的总用电需求,构建船舶的功率平衡约束条件、输出功率约束条件、推进电机功率需求约束条件、剩余电能供应能力约束条件和航行计划约束条件;
4、步骤2:根据船舶的预期航行计划和船舶当前地理位置信息,获取船舶当前位置与目的地之间的全部可供选择的航线信息,以及对应的船舶在当前及未来的途径海域的名称与管辖权归属;
5、步骤3:根据船舶当前及未来所途径海域的管辖权归属搜索对应水域的排放限制要求,构建动态排放约束条件;
6、步骤4:根据能量管理策略经济优化目标需求以及动态排放约束条件,构建能量管理策略辅助决策模型的目标函数;
7、步骤5:根据步骤1中构建的数个约束条件、步骤3中构建的目标函数、乌燕鸥算法构建能量管理策略辅助决策模型;
8、步骤6:用能量管理策略辅助决策模型基于实时数据,对步骤2中获得的每条航线生成各个航线的能量管理策略辅助决策。
9、进一步地,所述功率平衡约束条件为:基于能量守恒定律,所有处于同一电网内的用电设备的电能消耗情况的总和,等于电网内发电设备的电能生产情况的总和;
10、输出功率约束条件为:电能供给设备生产厂家提供的额定输出功率变化范围;
11、推进电机功率需求约束条件为:推进电机生产厂家提供的额定的输入功率变化范围;
12、剩余电能供应能力约束条件为:仅使用按能量转换效率计算的方式,当前电能供给设备自身的所能达到的最大供电电量;
13、航行计划约束条件为:对于每一航线的理想航行里程为航行计划约束条件的下限值,预估最大航行里程值为航行计划约束条件的上限。
14、进一步地,所述步骤4中,所述目标函数的具体公式如下:
15、mincost=cdg+cb+csc+fee
16、cdg=price·vfuel+α(lfh)·pdg
17、cb=cdeg,b=βb·(bcd+be)
18、csc=cdeg,sc=βsc·ccd
19、
20、式中,cost为船舶电力系统的总运行成本;cdg为柴油发电机的使用成本;cb为蓄电池组的使用成本;csc为超级电容器的使用成本;price为柴油油价;vfuel为柴油发电机的燃油消耗量;fee为动态排放约束条件经过罚函数处理的排放成本;α(·)为柴油发电机的运维费用系数,是负荷率lfh的函数;cdeg,b为蓄电池组的衰退损耗费用;βb为蓄电池组的衰退损耗系数;bcd为蓄电池组的充、放电交替循环系数;be为蓄电池组的过量使用幅度;cdeg,sc为超级电容器的衰退损耗费用;βsc为超级电容器的衰退损耗系数;ccd为超级电容器的充、放电交替循环系数;li为船舶排放第i种废气的体积,ζi为船舶排放单位体积的第i种废气的成本折算系数。
21、进一步地,所述成本折算系数的具体设置为:
22、当船舶所在水域的废气排放不受限制时,成本折算系数为0;当船舶所在水域的废气被禁止排放时,成本折算系数的设置范围为68814~74120;当船舶所在水域的废气仅允许有限排放时,成本折算系数设置为船舶排放每单位体积气体时所受罚款数值。
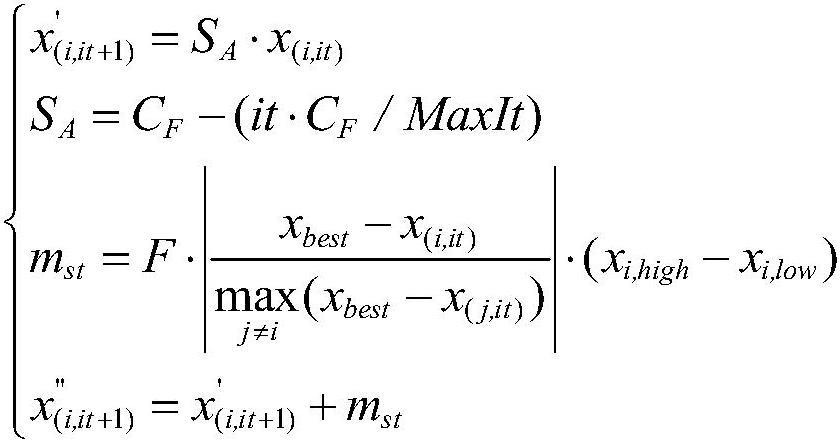
23、进一步地,所述步骤5的乌燕鸥算法中乌燕鸥个体进行迁移操作的具体公式如下:
24、
25、式中,x′(i,it+1),x″(i,it+1)分别为第i个乌燕鸥个体在下一代的临时位置1与2;sa、cf为算法参数;x(i,it)为第i个乌燕鸥个体在第it代迭代中的当前位置;mst为第i个乌燕鸥个体的聚集距离;f为个体的聚集方向,f=±1,由个体与猎物之间差值的符号决定;xi,high、xi,low分别为第i个乌燕鸥个体的取值上界和取值下界;max(xbest-x(j,it))代表猎物xbest与种群中其他个体xj之间的差异的最大值;xbest为第it代迭代中猎物所在位置;rand为随机数。
26、进一步地,所述步骤5的乌燕鸥算法中乌燕鸥个体所在位置进行局部挖掘时搜索范围的参数飞行轨迹半径为:
27、r=u·ek·v
28、其中,
29、式中,fmax、fmin分别为当前种群中个体的目标函数值的最大值和最小值;fi、fk分别为第i、k个个体的目标函数值,其中fk为任意介于fmax、fmin之间的目标函数值。
30、本发明的有益效果:
31、本发明根据航行水域管辖权所属海事部分的管理规定,适应性地改变每种废气的成本折算系数,能够帮助船舶遵守当地管理规定,提高所述辅助决策模型的自主灵活性。
32、本发明提供的改进乌燕鸥算法的更新机制,基于候选解即优化变量的分量间存在耦合关系,而此耦合关系是由储能设备的性质和时间一维性导致的,对将候选解在进行迁移时的执行方式改为综合考虑个体自身在种群中的实际水平以及相对水平的方式。改进后算法能够增强群众中个体间的多样性,以提高算法对候选解的优化能力,且避免算法的优化过程中出现个体陷入局部最优解的停滞现象,从而提高辅助决策模型对能量管理策略的优化能力。
33、本发明提供的改进乌燕鸥算法的更新机制,基于候选解受约束条件限制的特征,即从数量和重要性角度而言种群内的可行解远胜于不可行解,改变了决定算法在个体所在位置进行局部挖掘时搜索范围的参数飞行半径r的计算方式。在标准算法的基础上加入了对个体在种群中相对水平的考虑,改进后算法更加注重于对种群内更优质的个体们进行局部挖掘,提高了算法对优化解的优化能力,从而提高了辅助决策模型对能量管理策略的优化能力。
- 还没有人留言评论。精彩留言会获得点赞!