基于城市慢行交通仿真的慢行群体安全状态测算系统和方法
本发明涉及交通行业,具体为一种基于anylogic与arcgis的城市慢行交通仿真建模与慢行群体拥挤度测算系统和方法。
背景技术:
1、传统慢行交通安全性评价方法侧重于从片面、静态视角分析道路环境特征对慢行群体的身心影响,而较少量化实际或规划方案中道路环境对慢行群体的实际安全影响,这导致安全性评价结果与道路环境改善策略之间直接联系较弱。
2、如何构建具有慢行主体出行习惯的仿真模型,并使之与环境模型产生动态交互,是当前慢行交通专项规划编制工作中亟需的技术手段。以anylogic为代表的复杂系统仿真软件,提供了考虑社会力作用的行人库,能较好地模拟行人在复杂道路环境下的适应性行为,但该类型软件却存在建模效率低、空间分析能力等局限性。
技术实现思路
1、本发明所要解决的技术问题在于,突破不同分析软件间矢量数据结构差异,兼容gis(geographic information system, 地理信息系统)分析工具在空间建模、空间分析与anylogic在仿真模拟等方面的优势,提供一种高效、便捷的多主体道路环境快速建模方法,评价慢行群体出行安全状态,验证更新策略的有效性。
2、本发明为解决以上技术问题,所采用以下技术方案:
3、本发明提出一种基于城市慢行交通仿真的慢行群体安全状态测算方法,包括步骤:
4、s1:参数化社会慢行群体出行习惯,并生成符合智能体身份的随机路线合集;具体步骤:
5、步骤11、归纳百度poi点为位置点与服务点两类,设置各类慢行群体均由位置点进入,经过数个服务点,最终从位置点离开工作区;
6、步骤12、细化由工作群体、家长、学生,以及不包括前述人群的居民组成的四类慢行群体的行动逻辑,明确符合其身份的进出位置点,与所需经历poi点的类别与数量;
7、步骤13、根据步骤12中各类步行群体待抵达的各类出行目的地数量,从本地poi数据集中随机抽选对应数量的poi点,组成目标点集合;
8、步骤14、将片区地形图在arcgis中地理配准,沿人行道中心线绘制步行网络,沿人行道与机动车道边界向机动车道延伸绘制骑行网络;
9、步骤15、将人行网络、步行网络按折点打断处理,再将步行网络、骑行网络转换为无向图模型;
10、步骤16、基于步行网络的无向图对象,进一步获得步骤13中相邻目标点间的最短步行路径,以路径端点的坐标合集的形式记录行程,获得备选的步行路线合集,再以同样方式获得备选的骑行路线合集;
11、步骤17、基于所有路径端点的坐标合集在anylogic中创建用以导航慢行群体的目标线。
12、s2:构建道路环境矢量模型,将gis矢量要素直接映射到anylogic仿真模型中代替手动建模;具体如下:
13、步骤21、基于arcgis绘制墙要素以及道路网络,再以矢量点的形式标注停车位、公交站的位置,将其所属道路名称、相对道路延伸方向的空间方位信息写入属性表,将各种矢量要素转换为geojson格式,并利用python代码将各要素空间位置调整至(0,0)附近;
14、步骤22、利用python代码将geojson格式的墙要素自动转换为anylogic墙要素:在墙要素线段折点的基础上增加用以表征前后走向的辅助点;将每个线要素的起点、折点与辅助点相对于起点的位置信息以xml格式写入anylogic中墙要素对应位置;为每段墙要素生成唯一的要素名称与要素id;
15、步骤23、利用python代码将geojson格式的路网、路段、停车位要素映射为anylogic中对应的要素对象:以xml格式在anylogic中对应位置构建路网对象,并在路网对象中嵌入路段、停车位要素,为路网及其附属对象创建唯一的要素名称与要素id;
16、步骤24:利用python代码自动生成停车位占地面要素与占地面控制插件,以xml格式写入anylogic中目标面要素对应位置;
17、步骤25、为自动生成的路网手动添加或调整路口要素、停止线要素,再对每个行人过街通道添加红绿灯,使之与对应停止线绑定。
18、s3、构建慢行群体与机动车移动逻辑;具体如下:
19、步骤31、设置慢行主体行动逻辑:智能体从人行道边缘处、小区出入口产生,以最短路径算法提供的目标线序列作为导航介质,使智能体以最小距离成本连接抵达预定路线中的每一个poi点,并在对应poi点上停留相应时间,最终智能体通过所有poi点,从人行道边缘处或小区出入口离开工作区;
20、步骤32、为机动车群体设置移动逻辑:机动车由机动车道边缘处产生,设定巴士车在公交站处停留或排队,非公交机动车部分选择停车位处停留,部分非公交机动车直接通行,从机动车道边缘处离开工作区;
21、步骤33、设定行人过街与车辆减速的逻辑:当行人抵达各人行通道两侧目标线时,抵达或即将抵达停车线的车辆减速;
22、步骤34、设定停车位占地面阻断行人流的逻辑:设定当车辆进入停车位时,车位所对应占地面不可进入,而机动车离开停车位后,占地面重新对行人开放。
23、s4、模拟从非放学时段到放学时段街区慢行群体活动场景,评估拥挤状态变化,具体如下:
24、步骤41、构建“track”与“record”事件记录行人时空轨迹信息;
25、步骤42、将慢行主体的时空轨迹分时段写入shapefile矢量文件当中;
26、步骤43、利用arcgis读取shapefile文件,计算行人在不同时间对机动车道的占用面积、人行道上的平均人口密度、慢行群体平均移动速度。
27、作为本发明进一步的具体方案,步骤15中,步行网络无向图通过以下具体步骤构建:
28、a、利用python脚本将步行网络中各路段的起始点坐标、欧氏距离一一读取,并转成文本形式;
29、b、利用第三方python模块networkx读取文本形式的步行网络,构建无向图对象。
30、作为本发明进一步的具体方案,步骤15中,骑行网络无向图通过以下具体步骤构建:
31、a、利用python脚本将骑行网络中各路段的起始点坐标、欧氏距离一一读取,并转成文本形式;
32、b、利用第三方python模块networkx读取文本形式的骑行网络,构建无向图对象。
33、本发明还提出一种基于城市慢行交通仿真的慢行群体安全状态测算系统,具体包括:
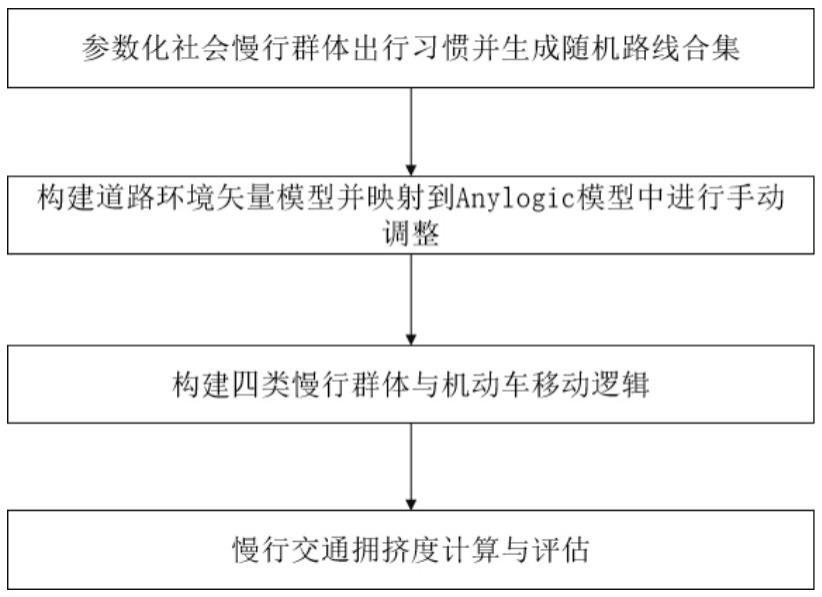
34、随机路线生成模块,用于:参数化社会慢行群体出行习惯,并生成随机路线合集;
35、道路环境矢量模型模块,用于:构建道路环境矢量模型,将gis矢量要素直接映射到anylogic仿真模型中进行手动调整;
36、移动逻辑构建模块,用于:构建慢行群体与机动车移动逻辑:基于步行网络、骑行网络与片区内感兴趣点poi分布,利用最短路径算法获取慢行群体的备选路径;
37、拥挤度计算与评估模块,用于慢行交通拥挤度计算与评估:将备选路径以及导航目标线写入anylogic仿真模板,为慢行群体、机动车设计运行逻辑,再计算各类慢行群体的平均移动速度、空间分布密度、行人占用机动车道面积占比指标。
38、本发明还提出一种电子设备,包括:至少一个处理器;以及与所述至少一个处理器通信连接的存储器;其中,所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行本发明前述的方法。
39、最后,本发明提出一种存储有计算机指令的计算机可读存储介质,其特征在于,所述计算机指令用于使所述计算机执行本发明所述的方法。
40、与现有技术相比,本发明所具有的技术效果为:
41、本发明构建符合工作群体、居民(非家长或学生)、家长、学生四类慢行群体出行习惯与机动车移动逻辑的五类智能体,并基于实际工作、学习、生活环境建立起行人路线合集。
42、本发明构建从gis矢量要素到anylogic模型中环境要素的转换算法,从而极大地提高了城市道路交通的建模效率,避免对小区边界、道路、建筑轮廓等线、面矢量要素的重复绘制与建模工作。
43、3)本发明设计了一种为anylogic智能体预设路径的技术方法,将智能体随机匹配的行人路线映射为导航目标线的合集,使anylogic智能体既具备个性化路线选择的能力,又兼具社会力作用,从而提高对真实人流的模拟效果。
44、4)本发明提供了慢行交通群体拥挤度的评价指标与计算方法,可观察各时段、各区域的慢行群体的平均移动速度、空间分布密度、行人占用机动车道面积占比的指标变化。
- 还没有人留言评论。精彩留言会获得点赞!