一种基于库岸点云的河道断面自动提取方法与流程
本发明涉及海洋测绘应用,尤其涉及一种基于库岸点云的河道断面自动提取方法。
背景技术:
1、河道断面是库容曲线分析、泥沙淤积分析等分析工作的基础数据源。随着水电站建成运行,库区水深大幅增加,高精度水深数据获取难度大。此外,库区多建于野外山区,人工走测困难,风险源多。与传统全站仪、rtk、单波束测深仪相比,三维激光扫描仪、多波束测深仪具有非接触测量、作业效率高、测量精度高等优点,它们把测绘技术从点、线扩展到面。同时,两者的点云具有一致的数据结构,可协同进行库岸点云一体化处理,十分适用于库岸地形测绘。
2、由于点云散乱地分布在地物表面,如何从地形复杂、数据量冗余、密度不均匀且无拓扑结构的点云场景中重建河道断面形态变得十分困难。周建红(2018年)等将缓冲区的机载lidar点云进行局部tin重构,根据tin的拓扑关系实现断面线与tin求交,生成地形断面图。黄亮(2021年)等将机载lidar点云转化成edm,根据中心线搜索深泓点,结合dem提取高程。这两类河道断面提取方法,需要将实测点云内插转换成tin或dem,不但会导致精度损失,且转换过程是非常耗时的。
技术实现思路
1、本发明的目的在于针对上述现有技术的不足,提供了一种基于库岸点云的河道断面自动提取方法,能有效从复杂地形中直接提取河道断面,无内插转换成tin或dem,提取精度高。
2、为实现上述目的,本发明采用了如下技术方案:
3、本发明提供了一种基于库岸点云的河道断面自动提取方法,包括以下步骤:
4、s1、对陆域激光点云以及水下多波束点云进行协同融合,得到库岸点云;
5、s2、根据点云的空间分布特征,使用离群点滤波器剔除噪点,进行点云预处理;
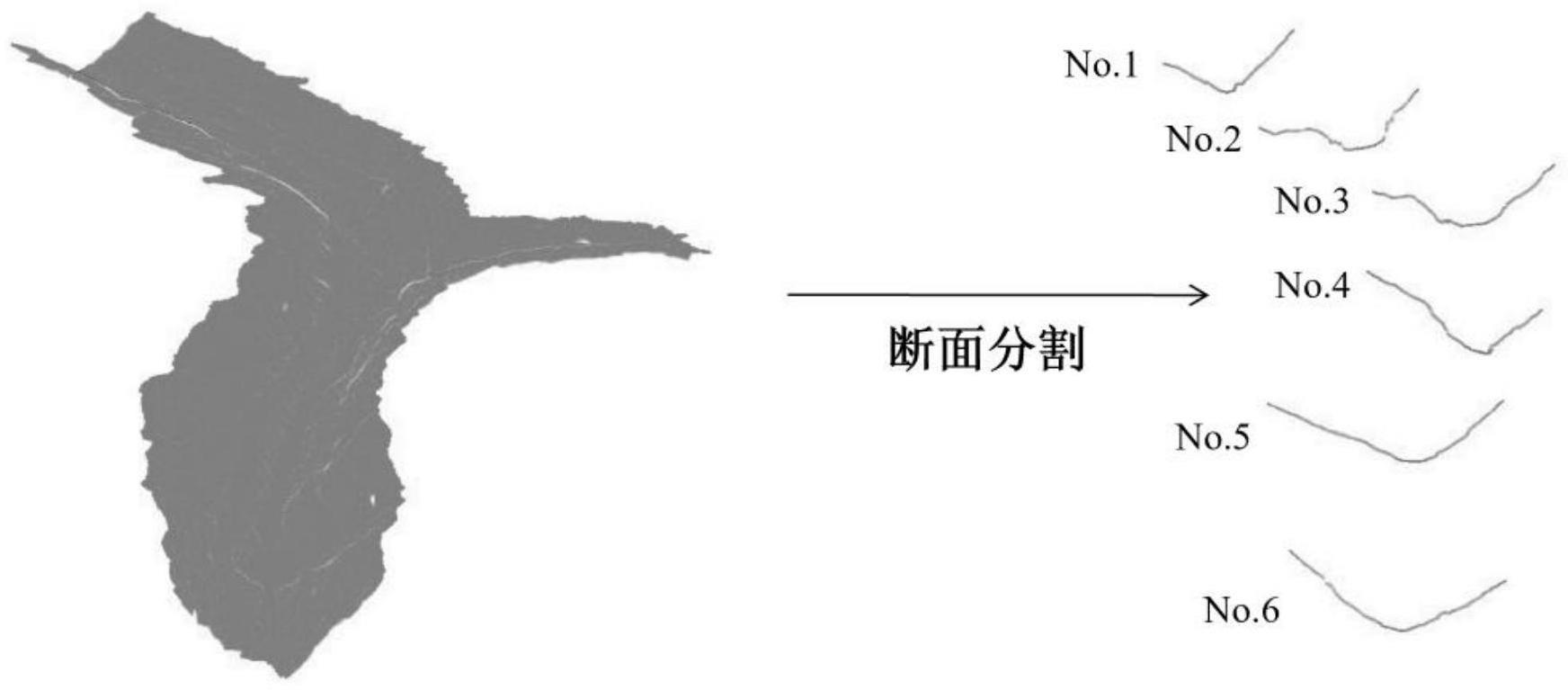
6、s3、根据河道断面桩点将预处理后的所述点云,分割成线性数据结构体,实现点云断面提取;
7、s4、将线性数据结构体内的点云,转换到对应的独立坐标系,完成点云组织管理;
8、s5、计算各点云至拟合曲线的最小距离;
9、s6、构建曲线亲和度模型,保留形态特征点、平滑点和删除冗余点;
10、s7、分裂河道断面,按所述s6迭代处理,直至不再有点云被删除,实现河道断面精化。
11、进一步,所述s1中,将滤波后的陆域激光点云、测深改正后的水下多波束点云进行协同融合,输出得到库岸点云集r,
12、
13、其中,rn为库岸点云集r中第n个点云;为点云的三维坐标。
14、进一步,所述s2中,索引所述库岸点云集r,遍历计算rn的k领域内距离均值根据高斯分布的均值μ和标准偏差σ建立离群点过滤模型,将在所述判定模型区间之外的点云判定为噪点,并过滤:
15、
16、其中,为中第n个距离均值;μ、σ为的均值和标准偏差;f为比例因子;
17、输出预处理点云集p:
18、
19、其中,pn为p中第n个点云;为点云的三维坐标。
20、进一步,所述s3中,
21、s301、根据预设断面左桩点l(xl,ll),右桩点r(xr,yr),构建河道断面线性方程为:
22、l(l,r):ax+by+c=0 (4)
23、其中,a、b、c为线性方程的三个系数;
24、s302、索引所述预处理点云集p,遍历点云pn,将点云pn投影至l,得到垂足fn为:
25、
26、其中,为垂足的二维坐标;
27、s303、建立断面分割模型,将符合所述模型区间之内的点云pn,分割成线性数据结构体s[…pn],则:
28、
29、其中,wth为宽度阈值;hth为高程阈值;lth为长度阈值。
30、进一步,所述s4中,
31、s401、以左桩点l(xl,yl)为零点,计算断面线l的方位角α,则:
32、
33、其中,α为断面线l的方位角;
34、s402、将所述线性数据结构体s[…pn]内的点云转换到以所述左桩点l(xl,ll)为原点的独立坐标系,则:
35、
36、其中,k为系数因子;
37、所述独立坐标系内点云的坐标表达式为:
38、
39、进一步,所述s5中,
40、s501、将所述独立坐标系内的点云利用最小二乘拟合成二元二次曲线,则:
41、y=ax2+bx+c (9)
42、
43、其中,a、b、c二元二次方程的三个系数;
44、s502、依次计算所述点云pn至拟合曲线的最短距离
45、进一步,所述s6中,连接独立坐标系内首尾点云弦,依次计算各点云到弦的距离d=[d2,d3…dn-1],找出最大值dmax并标记最大值对应点云pmax,建立曲线亲和度模型,将符合所述模型区间之内的形态特征点、平滑点保留,冗余点删除,则:
46、
47、其中,sth为比例尺阈值;ψ为比例因子。
48、进一步,在最大值对应点云pmax处,将河道断面分裂成左曲线、右曲线,并按所述s6迭代处理,直至不再有点云被删除。
49、本发明的有益效果为:该方法通过分析点云的空间特征,将海量点云分割成线性数据结构体,保留地物局部特征的同时,大幅降低结构体数据量,有效降低了计算机处理难度;将点云转换至独立坐标系,实现无拓扑结构点云有效组织管理;根据断面线的趋势特征,提取形态特征点、平滑点,剔除冗余点,完成河道断面精化。该方法从机理上分析了库岸点云的空间特征,能有效从复杂地形中直接提取河道断面,无内插转换成tin或dem过程,具有提取精度高,运行速度快优点。
技术特征:
1.一种基于库岸点云的河道断面自动提取方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种基于库岸点云的河道断面自动提取方法,其特征在于:所述s1中,将滤波后的陆域激光点云、测深改正后的水下多波束点云进行协同融合,输出得到库岸点云集r,
3.根据权利要求2所述的一种基于库岸点云的河道断面自动提取方法,其特征在于:所述s2中,索引所述库岸点云集r,遍历计算rn的k领域内距离均值根据高斯分布的均值μ和标准偏差σ建立离群点过滤模型,将在所述模型区间之外的点云判定为噪点,并过滤:
4.根据权利要求3所述的一种基于库岸点云的河道断面自动提取方法,其特征在于:所述s3中,
5.根据权利要求4所述的一种基于库岸点云的河道断面自动提取方法,其特征在于:所述s4中,
6.根据权利要求5所述的一种基于库岸点云的河道断面自动提取方法,其特征在于:所述s5中,
7.根据权利要求6所述的一种基于库岸点云的河道断面自动提取方法,其特征在于:所述s6中,连接独立坐标系内首尾点云弦,依次计算各点云到弦的距离d=[d2,d3…dn-1],找出最大值dmax并标记最大值对应点云pmax,建立曲线亲和度模型,将符合所述模型区间之内的形态特征点、平滑点保留,冗余点删除,则:
8.根据权利要求7所述的一种基于库岸点云的河道断面自动提取方法,其特征在于:在最大值对应点云pmax处,将河道断面分裂成左曲线、右曲线,并按所述s6迭代处理,直至不再有点云被删除。
技术总结
本发明提供一种基于库岸点云的河道断面自动提取方法,包括对陆域激光点云以及水下多波束点云进行协同融合,得到库岸点云;根据点云的空间分布特征,使用离群点滤波器剔除噪点,进行点云预处理;根据河道断面桩点将预处理后的所述点云,分割成线性数据结构体,实现点云断面提取;将线性数据结构体内的点云,转换到对应的独立坐标系,完成点云组织管理;计算各点云至拟合曲线的最小距离;构建曲线亲和度模型,保留形态特征点、平滑点和删除冗余点;分裂河道断面,迭代处理,直至不再有点云被删除,实现河道断面精化;该方法从机理上分析了库岸点云的空间特征,能有效从复杂地形中直接提取河道断面,无内插转换成TIN或DEM过程,具有提取精度高,运行速度快优点。
技术研发人员:李启涛,孙振勇,马耀昌,冯国正,曹磊,董先勇,樊小涛,郑亚慧,张世明,刘世振,杨柳,胥洪川,孙征安,项雪峰,付强,何友福
受保护的技术使用者:长江水利委员会水文局
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!