基于双精度成像模组的大幅面微小缺陷检测系统及方法与流程
本发明涉及机器视觉,具体而言,涉及一种基于双精度成像模组的大幅面微小缺陷检测系统及方法。
背景技术:
1、随着信息时代的逐步发展,工业发展存在两个趋势:更加精密和更加庞大。大型器件由于运力出色、视觉冲击力强等原因受到人们青睐。民用大型飞机、超大型矿运卡车、巨幕led屏和大面积印刷广告等在人们的生产生活中用途广泛。大幅面材料、印刷品和器件等越来越多地应用在军工、宣传、机械制造等领域,优良的整体性质和平面性质决定了其在工程应用方面的不可替代性。
2、虽然大幅面器材性能良好,但相比于常规物品和材料,大幅面器材的制造和维护更加困难,生产出厂精度控制更不易实现,在生产、检测、运输和使用的过程中也更容易出现缺陷。如巨幕led屏的划伤、大型玻璃板材的裂纹等等。与小型物品的缺陷检测不同,大幅面器材的尺寸更大,只用一次成像就涵盖整个器材的范围不太可能。如果只使用小视野高精度成像模组扫描拍照,然后逐视野排查缺陷,则需要消耗非常多的时间;反之只使用大视野低倍率镜头搭配相机进行图像采集,则精度过低,无法准确定位微小缺陷和确定微小缺陷类型。
技术实现思路
1、本发明的目的在于提供一种基于双精度成像模组的大幅面微小缺陷检测系统及方法,通过采用两种不同精度成像模组先后对大幅面器材的全局和局部分别进行图像采集和缺陷检测的方案,达到快速定位缺陷,准确识别缺陷的目的。
2、本发明的实施例是这样实现的:
3、第一方面,本技术实施例提供一种基于双精度成像模组的大幅面微小缺陷检测系统,其包括:
4、运动平台,用于放置待检测的大幅面物品,并在电机的驱动下按照规划路径进行运动;
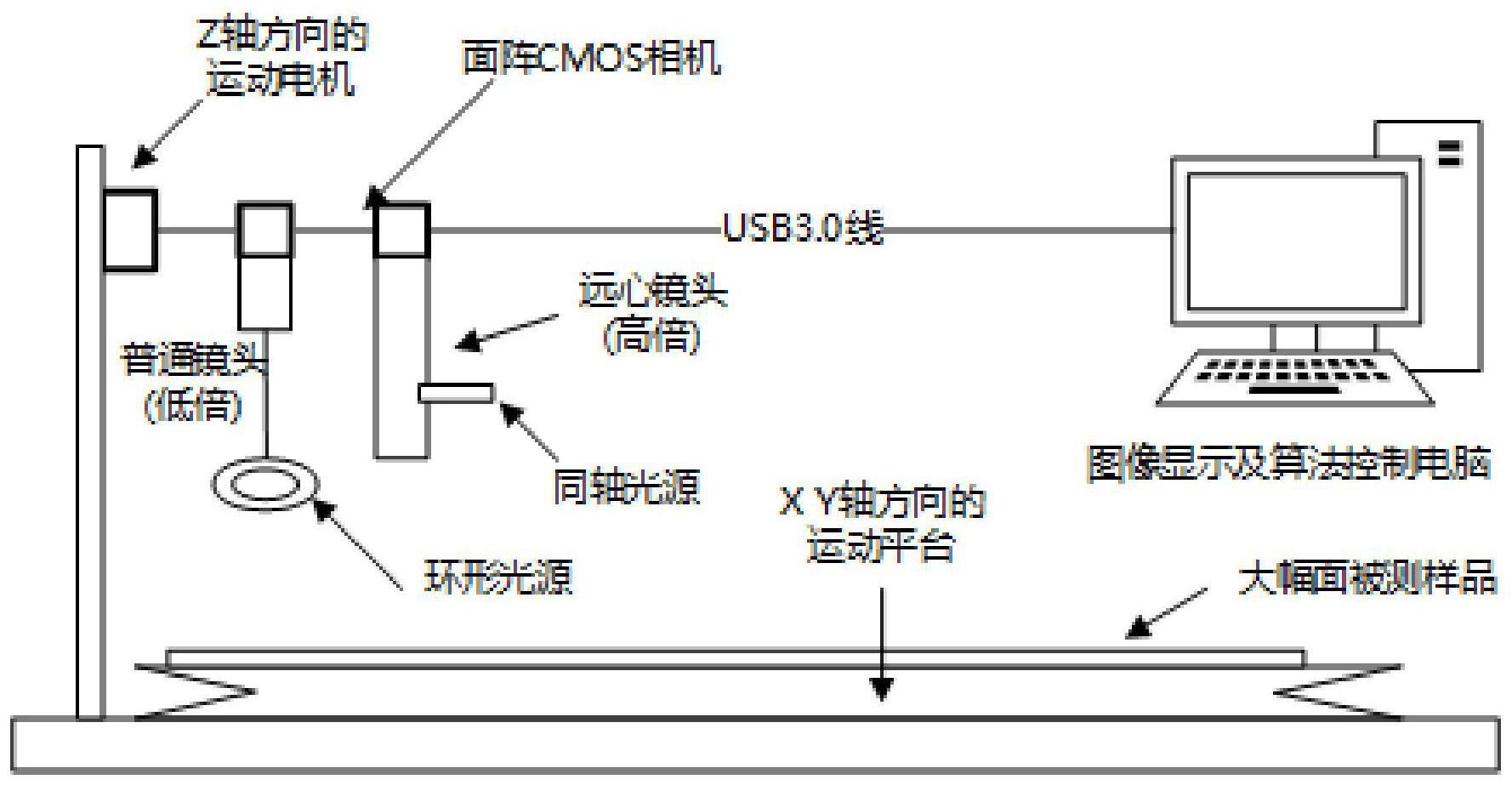
5、双精度成像模组,安装于z轴竖直面板上,用于在电机的驱动下实现对焦后进行图像采集,并将图像发送给控制器;
6、上述双精度成像模组包括大视野低倍率采集模块和小视野高倍率采集模块,上述大视野低倍率采集模块用于采集大幅面物品的大视野局部图像,上述小视野高倍率采集模块用于采集疑似缺陷的局部放大图像;
7、控制器,与上述电机和双精度成像模组连接,用于给上述运动平台规划相应的路径,以及对上述大视野低倍率采集模块采集到的图像进行缺陷检测,确定疑似缺陷位置坐标范围并保存;对上述小视野高倍率采集模块采集到的图像进行缺陷细分类检测,确定缺陷类型及坐标并保存。
8、基于第一方面,在本发明的一些实施例中,上述控制器包括第一路径规划模块、第一图像处理模块、第二路径规划模块和第二图像处理模块;
9、第一路径规划模块,用于根据大幅面物品的尺寸信息和大视野低倍率采集模块的视野范围信息确定移动拍摄视野数量,生成第一规划路径,并通过xy方向的电机驱动上述运动平台按照上述第一规划路径进行运动;
10、第一图像处理模块,用于遍历上述大视野低倍率采集模块采集到的大视野局部图像,进行缺陷检测,确定疑似缺陷位置坐标范围并保存;
11、第二路径规划模块,用于根据上述疑似缺陷位置坐标范围的分布情况,计算生成第二规划路径,并通过xy方向的电机驱动上述运动平台按照上述第二规划路径进行运动;
12、第二图像处理模块,用于遍历上述小视野高倍率采集模块采集到的疑似缺陷的局部放大图像,进行缺陷细分类检测,确定缺陷类型及坐标并保存。
13、基于第一方面,在本发明的一些实施例中,上述第一图像处理模块包括:
14、图像集获取子模块,用于获取上述大视野低倍率采集模块采集到的大视野局部图像,形成第一待处理图像集;
15、缺陷检测子模块,用于调用缺陷检测初步筛选算法遍历上述第一待处理图像集中的图像,检测出疑似缺陷位置区域;
16、疑似缺陷位置统计子模块,用于统计并保存疑似缺陷位置区域的坐标范围,生成疑似缺陷文件集。
17、基于第一方面,在本发明的一些实施例中,上述第二图像处理模块包括:
18、图像集获取子模块,用于获取上述小视野高倍率采集模块采集到的疑似缺陷位置的局部放大图像,形成第二待处理图像集;
19、缺陷分类子模块,用于利用预置的缺陷分类模型对上述第二待处理图像集中的图像进行缺陷细分类推理,确定缺陷类型;
20、缺陷统计子模块,用于统计并保存缺陷类型及缺陷位置对应的坐标,生成缺陷结果文件集。
21、基于第一方面,在本发明的一些实施例中,上述双精度成像模组由面阵coms相机、不同倍率的镜头和对应的光源构成。
22、第二方面,本技术实施例提供一种基于双精度成像模组的大幅面微小缺陷检测方法,其包括:
23、步骤s1:将待检测的大幅面物品放置在运动平台上,并用夹具固定;
24、步骤s2:启动大视野低倍率采集模块,控制z轴电机运动对焦;
25、步骤s3:根据大幅面物品的尺寸信息和大视野低倍率采集模块的视野范围信息确定移动拍摄视野数量,生成第一规划路径,并通过xy方向的电机驱动上述运动平台按照上述第一规划路径进行运动;
26、步骤s4:通过大视野低倍率采集模块进行图像采集,并遍历上述大视野低倍率采集模块采集到的大视野局部图像,进行缺陷检测,确定疑似缺陷位置坐标范围并保存;
27、步骤s5:关闭大视野低倍率采集模块,开启小视野高倍率采集模块,并控制z轴电机运动对焦;
28、步骤s6:根据上述疑似缺陷位置坐标范围的分布情况,计算生成第二规划路径,并通过xy方向的电机驱动上述运动平台按照上述第二规划路径进行运动;
29、步骤s7:通过小视野高倍率采集模块进行图像采集,并遍历上述小视野高倍率采集模块采集到的疑似缺陷的局部放大图像,进行缺陷细分类检测,确定缺陷类型及坐标并保存。
30、相对于现有技术,本发明的实施例至少具有如下优点或有益效果:
31、第一方面,本技术实施例提供一种基于双精度成像模组的大幅面微小缺陷检测系统,包括运动平台、双精度成像模组和控制器。运动平台用于放置待检测的大幅面物品,并在电机的驱动下按照规划路径进行运动。双精度成像模组安装于z轴竖直面板上,用于在电机的驱动下实现对焦后进行图像采集,并将图像发送给控制器。其中,双精度成像模组包括大视野低倍率采集模块和小视野高倍率采集模块,大视野低倍率采集模块用于采集大幅面物品的大视野局部图像,小视野高倍率采集模块用于采集疑似缺陷的局部放大图像。控制器与电机和双精度成像模组连接,用于给运动平台规划相应的路径,以及对大视野低倍率采集模块采集到的图像进行缺陷检测,确定疑似缺陷位置坐标范围并保存;对小视野高倍率采集模块采集到的图像进行缺陷细分类检测,确定缺陷类型及坐标并保存。本技术通过采用两种不同精度成像模组先后对大幅面器材的全局和局部分别进行图像采集和缺陷检测的方案,达到快速定位缺陷,准确识别缺陷的目的。
32、第二方面,本技术实施例提供一种基于双精度成像模组的大幅面微小缺陷检测方法,首先通过利用三维运动平台和大视野低精度成像模组进行大幅面区域内的逐点遍历式图像采集,经过图像处理算法判定获得疑似缺陷区域位置及坐标范围。然后使用小视野高精度成像模组逐个扫描疑似缺陷区域,进行缺陷细分类检测,最终确定并输出对应的缺陷类型和坐标。本技术能够同时兼顾大幅面物品的缺陷检测速度和精度,对大尺寸材料、器件、模组的品控、维护和质量追溯具有指导价值。
- 还没有人留言评论。精彩留言会获得点赞!