一种基于深度学习网络架构的卫星图像云目标提取方法
本发明涉及遥感图像目标提取,特别涉及一种基于深度学习网络架构的卫星图像云目标提取方法。
背景技术:
1、卫星遥感即通过卫星在太空中探测地球地表物体对电磁波的反射和其发射的电磁波,从而提取这些物体的信息,完成远距离物体识别。卫星图像中云的存在对遥感卫星图像的准确分析造成了障碍,使得卫星图像云目标提取识别成为卫星图像预处理关键步骤之一,在各个领域有着广泛的应用前景,尤其在地面信息检测、地理位置探测、城乡规划、导航系统、灾情监测、抗灾救灾部署、环境(石油泄漏或污染)等应用方面。因此,对卫星图像云目标提取展开研究具有十分重要的意义。
2、传统的卫星图像云目标提取方法依赖于人工设计阈值且易受复杂背景干扰,存在应用场景单一、识别精度不高、提取效率低及泛化能力差等特点。基于深度学习的方法借助其自主学习参数和自动提取特征的能力,摆脱了对人工设计阈值的依赖,相比于传统方法具有抗干扰性强及提取精度高等优点,特别是在场景复杂多变、目标形态多变的卫星图像云目标提取领域中具有巨大的发展潜力。
3、近年来,随着人工智能科技的兴起,针对卫星图像云目标提取领域,已有基于深度学习的cnn(卷积神经网络)、u-net(u型网络)及cloudnet(云网络)等算法应用于卫星图像云目标提取,并且在卫星图像云目标提取场景取得了较优异的表现。然而,现有的研究方法存在网络模型训练时间长、应用场景单一、实时性差以及准确率低等弊端。因此,对于卫星图像云目标提取场景,如何提出一个收敛速度快、实时性强、适应复杂场景、准确率高的卫星图像云目标提取方法,正是亟待解决的技术难题。
技术实现思路
1、发明目的:针对以上问题,本发明目的是提供一种基于深度学习网络架构的卫星图像云目标提取方法,实现卫星图像云目标准确提取,提升卫星遥感图像准确分析能力。
2、技术方案:本发明的一种基于深度学习网络架构的卫星图像云目标提取方法,包括以下步骤:
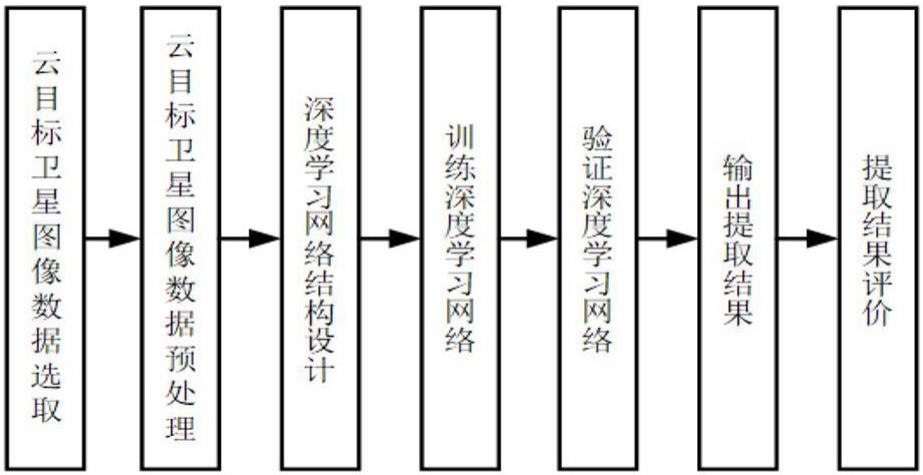
3、s10,获取云目标卫星图像数据,对云目标卫星图像进行预处理,获取带有像素标注的云目标卫星图像数据集,并按比例划分成训练数据集和验证数据集;
4、s20,构建初始提取网络,利用训练数据集对初始提取网络进行训练,将训练后的深度学习网络作为卫星图像云目标提取网络;
5、s30,利用验证数据集验证卫星图像云目标提取网络,获得卫星图像云目标提取结果。
6、进一步,初始提取网络由输入层、编码器层、解码器层、conv2r层、平均插值处理层和输出层构成;
7、其中conv2r层由二维卷积和修正线性激活函数层构成,解码器层由decoderl块和二维上采样层构成,decoderl块由1个连接层、2个conv2r层和1个注意机制块构成;
8、编码器层包括第一编码器层、第二编码器层、第三编码器层、第四编码器层和第五编码器层;
9、解码器层包括第一解码器层、第二解码器层、第三解码器层和第四解码器层,第一解码器层包括1个decoderl块和1个二维上采样层,第二解码器层包括2个decoderl块和2个二维上采样层,第三解码器层包括3个decoderl块和3个二维上采样层,第四解码器层包括4个decoderl块和4个二维上采样层。
10、进一步,构建初始提取网络包括:
11、将输入层作为输入端,将输入层依次连接第一编码器层、第二编码器层、第三编码器层、第四编码器层和第五编码器层,将第五编码器层的输出端依次连接第一解码器中二维上采样层up11和decoderl11块;
12、将第四编码器的输出端分别连接decoderl11块的输入端和第二解码器中二维上采样层up21的输入端;
13、将第三编码器的输出端分别连接第二解码器中decoderl21块的输入端、decoderl22块的输入端和第三解码器中二维上采样层up31的输入端;
14、将第二编码器的输出端分别连接第三解码器中decoderl31块的输入端、decoderl32块的输入端、decoderl33块的输入端和第四解码器中二维上采样层up41的输入端;
15、将第一编码器的输出端分别连接第四解码器中decoderl41块的输入端、decoderl42块的输入端、decoderl43块的输入端和decoderl44块的输入端;
16、将decoderl11块的输出端连接第二解码器中二维上采样层up22的输入端;
17、将二维上采样层up21的输出端连接decoderl21块的输入端,将二维上采样层up22的输出端连接decoderl22块的输入端,将decoderl21块的输出端分别连接decoderl22块的输入端和第三解码器中二维上采样层up32的输入端,将decoderl22块的输出端连接第三解码器中二维上采样层up33的输入端;
18、将二维上采样层up31的输出端连接decoderl31块的输入端,将二维上采样层up32的输出端连接decoderl32块的输入端,将二维上采样层up33的输出端连接decoderl33块的输入端,将decoderl31块的输出端分别连接decoderl32块的输入端和第四解码器中二维上采样层up42的输入端,将decoderl32块的输出端分别连接decoderl33块的输入端和第四解码器中二维上采样层up43的输入端,将decoderl33块的输出端连接第四解码器中二维上采样层up44的输入端;
19、将二维上采样层up41的输出端连接decoderl41块的输入端,将二维上采样层up42的输出端连接decoderl42块的输入端,将二维上采样层up43的输出端连接decoderl43块的输入端,将二维上采样层up44的输出端连接decoderl44块的输入端,将decoderl41块的输出端分别连接decoderl42块的输入端和conv2r1层的输入端,将decoderl42块的输出端分别连接decoderl43块的输入端和conv2r2层的输入端,将decoderl43块的输出端分别连接decoderl44块的输入端和conv2r3层的输入端,将decoderl44块的输出端连接conv2r4层的输入端;
20、将conv2r1层、conv2r2层、conv2r3层和conv2r4层的输出端分别连接平均插值处理层的输入端,将平均插值处理层的输出端连接输出层。
21、进一步,对云目标卫星图像进行预处理包括:
22、对云目标卫星图像数据进行裁剪,将裁剪后的云目标卫星图像数据块依次进行移位、缩放、旋转、添加噪声、亮度调整、水平翻转和垂直翻转转换操作。
23、进一步,利用训练数据集对初始提取网络进行训练包括以下步骤:
24、s201,设置训练起始学习率、最大学习率、训练批量数及训练轮次数;
25、s202,采用k-means聚类算法迭代求解,通过l2范数正则化防止网络过拟合;
26、s203,利用周期学习率策略更新学习率;
27、s204,使用梯度优化算法adam对网络训练进行优化,优化过程中使用骰子损失dice作为损失函数,计算公式如下:
28、,
29、式中, d表示dice损失值, n表示训练数据集样本数, p i表示训练数据集第 i个样本提取的像素值, g i表示训练数据集第 i个样本提取的真实像素值,;
30、s205,重复步骤s202至s204,直到初始提取网络收敛,获得初始提取网络模型和权值,保存权值。
31、有益效果:本发明与现有技术相比,其显著优点是:本发明采用云目标卫星图像数据预处理、深度学习网络架构、网络训练及验证技术,实现了卫星图像云目标准确提取,是一种收敛速度快、实时性强、适应复杂场景及准确率高的卫星图像云目标提取方法,能有效提升卫星遥感图像准确分析能力。
- 还没有人留言评论。精彩留言会获得点赞!