一种基于梯度求解的调节阈值的识别图像中单色物体的方法
本发明涉及一种基于梯度求解的调节阈值的识别图像中单色物体的方法,属于图像识别。
背景技术:
1、随着计算机科学的不断发展,图像识别技术运用越来越广泛,人工智能为图像识别技术的发展提供了源源不断的动力,同时也对硬件性能提出了新的要求。
2、在识别单色物体这一场景下,常用的yolo算法虽然具有较高的识别准确性,但是存在训练成本高,部署硬件性能要求高,实时性差等缺点。由于单色物体颜色特征较为明显,传统的使用色彩加形态学检测的方法也能完成任务。在室外场景下,由于光照会随太阳位置和天气的不同出现无法准确预测的变化,加上某些相机感光度差,不同时间拍摄到的同一物体会出现较大的明暗的色彩变化,导致如果使用固定阈值分割图像的话可能会出现物体部分结构没有被分出的现象从而影响形态学检测导致识别失败,而人工调整阈值会大大增加人力成本和时间成本。
技术实现思路
1、为了解决现有技术的不足,本发明提供一种基于梯度求解的调节阈值的识别图像中单色物体的方法,在给定初始阈值的情况选定部分物体区域,然后计算图像的色彩梯度来寻找可能存在的物体边缘,在此之中找到包含已划定的物体区域的边缘,即为待测物体边缘,从而根据最终选定区域的色值分布自动更新阈值。
2、本发明的技术方案如下:
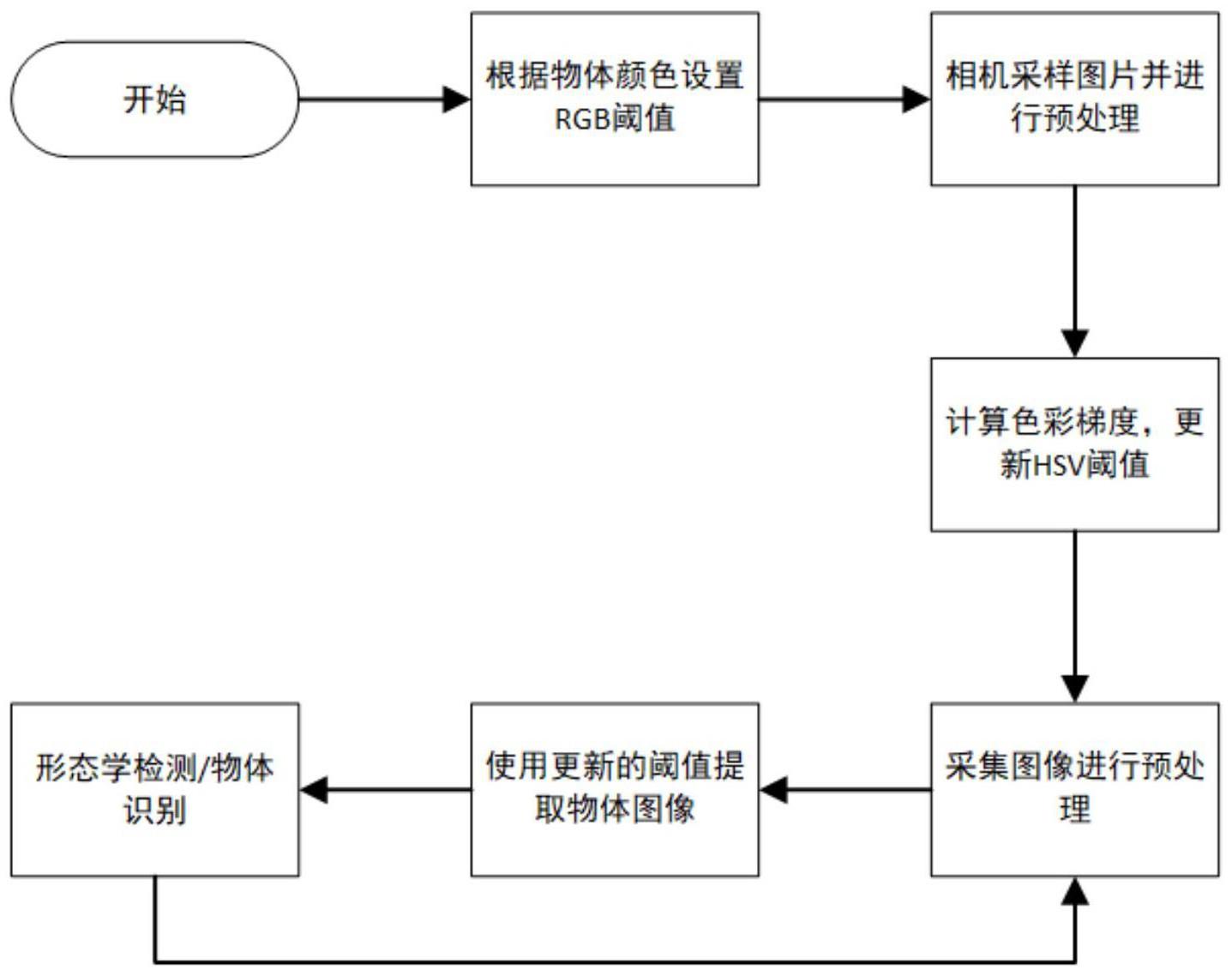
3、一种基于梯度求解的调节阈值的识别图像中单色物体的方法,包括如下步骤:
4、s1:根据待检测物体颜色设置初始rgb色域下的阈值范围,选取的阈值范围尽可能的包含物体颜色特征,如需要检测的物体是红色的,那么初始阈值中的r阈值就要设到一个较高的范围,使阈值可以提取大部分的红色区域;
5、s2:使用相机采集待测物体在某时刻环境中的一张图片并进行图像预处理;
6、s3:计算步骤s2预处理后图片的色彩梯度,根据初始rgb色域下的阈值范围抠出待测物体,并根据抠出的待测物体的图像更新出hsv阈值范围;
7、s4:相机采集新的图像,进行图像预处理,并将其转成hsv格式;
8、s5:使用更新后的hsv阈值在新采集的图像中提取待测物体,并进行腐蚀膨胀去除噪声;
9、s6:对提取后的图像按照需求进行形态学检测,来完成物体识别。
10、优选的,步骤s2和s4中的图像预处理即对图片进行高斯下采样,缩小图像,具体实现过程为:
11、s2.1:对当前图片使用高斯模板进行卷积,进行高斯模糊;
12、所谓高斯模糊就是对原始数据使用高斯模板进行卷积,卷积后的模板比原始图像会有轻微的模糊;
13、二维的高斯函数如下:
14、
15、其中(x,y)为坐标,σ为标准差(标准差的平方等于方差);
16、不同尺寸的滤波器得到的结果也不同,下面是(2k+1)x(2k+1)滤波器的计算公式:
17、
18、其中i、j对应高斯卷积核中的行和列;
19、标准差的大小一般取σ=0.3×(2ksize+1),其中ksize为窗口的大小。
20、s2.2:删除当前层的偶数行列,得到上一层图像,上一层图像的大小只有下一层的1/4,大大减轻了后续操作的运算压力。
21、优选的,步骤s3的具体实现过程为:
22、s3.1:求解整张图片的色彩梯度;
23、s3.2:根据所求的梯度大小来寻找图像中所有物体的边缘;
24、s3.3:根据求解到的物体的边缘将图片裁剪成多个部分;
25、s3.4:对各个裁剪出的部分按需要进行形态学检测,提取出符合待检测物体的部分;
26、s3.5:计算各个裁剪出的部分中处在初始rgb色域下的阈值范围内的点的占比,占比最高的部分,即为最终提取出的待检测物体的部分;
27、s3.6:根据步骤s3.5最终提取出的待检测物体的部分得到最终的物体图像,然后将其转成hsv格式,并计算新的hsv阈值范围。
28、优选的,步骤s3.1中求解彩色图片色彩梯度的过程为:
29、导数表示函数的变化率,而梯度是一个有大小和方向的矢量,指向函数值变化最快的方向,将一幅图像,看成一个二维的函数f(x,y),那么该图像在x,y方向的梯度分别记作gx,gy,f(x,y)是离散的,梯度以连续两点的差来进行计算,如下:
30、gx=f(x+1,y)-f(x,y);
31、gy=f(x,y+1)-f(x,y);
32、使用r,g,b三个矩阵来代表图像三个通道的rgb值;
33、r=img[:,:,2];
34、g=img[:,:,1];
35、b=img[:,:,0];
36、用gxr,gxg,gxb分别表示三个通道在x方向上的梯度,gyr,gyg,gyb分别表示三个通道在y方向上的梯度;
37、那么图像x方向上的梯度为gxx=gxr2+gxg2+gxb2;
38、y方向上的梯度为gyy=gyr2+gyg2+gyb2;
39、x,y方向上的梯度为gxy=gxr*gyr+gxg*gyg+gxb*gyb;
40、m=[gxx(i,j),gxy(i,j);gxy(i,j),gyy(i,j)]
41、m为一个2×2矩阵,矩阵的元素都为与梯度相关的量,其中i,j为待求点的坐标;
42、则梯度用m中的最大特征值表示,如下:
43、grad(i,j)=max(eign(m));
44、在获得梯度大小和方向后,将对图像进行全面扫描,以去除可能不构成边缘的所有不需要的像素;为此,在每个像素处,检查像素是否是其在梯度方向上附近的局部最大值,即每个像素点的梯度值与该方向上相邻的两个梯度值做比较,若其为最大值者将其保留,否者将其置零;
45、然后进行双阈值检测,根据图像选取合适的高阈值和低阈值,通常高阈值是低阈值的2到3倍,如果某一像素的梯度值高于高阈值,则保留;如果某一像素的梯度值低于低阈值,则舍弃;如果某一像素的梯度值介于高阈值和低阈值之间,则从该像素的8邻域中寻找像素梯度值,如果存在像素梯度值高于高阈值,则保留,如果没有,则舍弃;
46、这样就完成了求取色彩梯度,提取物体边缘。
47、优选的,在光线不好的情况下简单的使用rgb阈值来检测图片不太实用,图像也可以使用hsv格式来表示,即h(色相),s(饱和度),v(明度)。在hsv中,v受光照的影响最大,而h基本不受阴影或者过高亮度的影响,所以可以采用舍弃v通道信息来对彩色物体检测的方法,效果比使用rgb格式更为可靠。
48、步骤s3.6中,计算新的hsv阈值的过程为:
49、找到已提取出的最终物体图像中的点的h通道和s通道的范围,得出新的hsv阈值范围。
50、优选的,形态学检测方法与要检测的物体有关,检测的物体不一样形态学检测方法也不一样,下面给出一种进行形态学检测的方法:
51、1、首先使用findcontours()函数在已经找到图像边缘中提取外廓(这是一个常用的算法,来自1986年的论文:topological structural analysis of digitized binaryimages by border following);
52、2、然后使用道格拉斯-佩克算法平滑曲线减少冗余的数据量;
53、3、根据优化后的外廓的形状和大小来确定待检测物体;
54、例如,要检测一个桶锥,提取出来外廓以后,只需要确定外廓的宽高比小于1,上半部分不超过下半部分的位置就可以判断它是一个桶锥,即外廓形状像一个三角形或梯形。
55、本发明未详尽之处,均可参见现有技术。
56、本发明的有益效果为:
57、1、本发明设计了一种对单色物体进行检测的方法,解决了环境光照等引起物体颜色出现变化导致使用固定阈值检测物体时效果差的问题,在相同环境下,本发明仅需对一张图像更新阈值,其后的检测运算压力小,实时性好。
58、2、本方法给出了一种根据环境自动调节色彩阈值的方法,省去了环境光照变化后人工手动设置阈值这一繁琐的操作。
59、3、本发明提出的基于梯度求解的调节阈值的识别图像中单色物体的方法,没有涉及到神经网络等需要运算量大或训练成本高的算法,仅在更新阈值时运算压力需求稍大,在后续的检测中运算压力小,实时性好,可在低算力的设备上部署。
- 还没有人留言评论。精彩留言会获得点赞!