一种针对粒子相态的动态集合识别方法和装置与流程
本发明涉及气象数据处理的,尤其是涉及一种针对粒子相态的动态集合识别方法和装置。
背景技术:
1、精确识别水合物粒子相态及其三维分布对于分析云中微物理过程、提高降水量测量精度和探究灾害性天气的演变规律具有十分重要的意义。双偏振雷达识别降水粒子相态的能力是基于降水粒子对电磁波的散射理论。空气中不同相态水成物粒子由于其形状、大小、密度和在空间的取向不同,而对不同偏振波的散射和退偏振效应都不同。
2、早期的相态识别研究发现影响相态识别准确率的关键因素是如何将偏振参量上互有重叠的各类相态准确的区分,为此提出使用了使用模糊逻辑的方法。该方法简单、直观并且易于改进,在随后的研究中基于模糊逻辑的双偏振相态识别方法被不断完善。模糊逻辑相态识别算法(hca)仍存在局限性,一是降水事件受区域变化影响很大,雷达观测也属于小尺度观测,基于雷达数据的相态识别方法具有显著的局地特征;二是很难确定识别结果是否正确,隶属函数是否为最优解,方法的准确性仍待提高;三是粒子相态识别结果的时空分布是否符合云物理规律,这是方法的可靠性问题。而后在模糊逻辑的基础上,使用神经网络自动学习和调整模糊逻辑计算的参量区间,以降低测量误差的影响。但神经网络训练的“真值”很难获取,并需要一定数量的训练集,限制了该方法的推广应用。
3、针对上述问题,还未提出有效的解决方案。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种针对粒子相态的动态集合识别方法和装置,以缓解了现有的粒子相态识别方法局地性较强且识别准确率较低的技术问题。
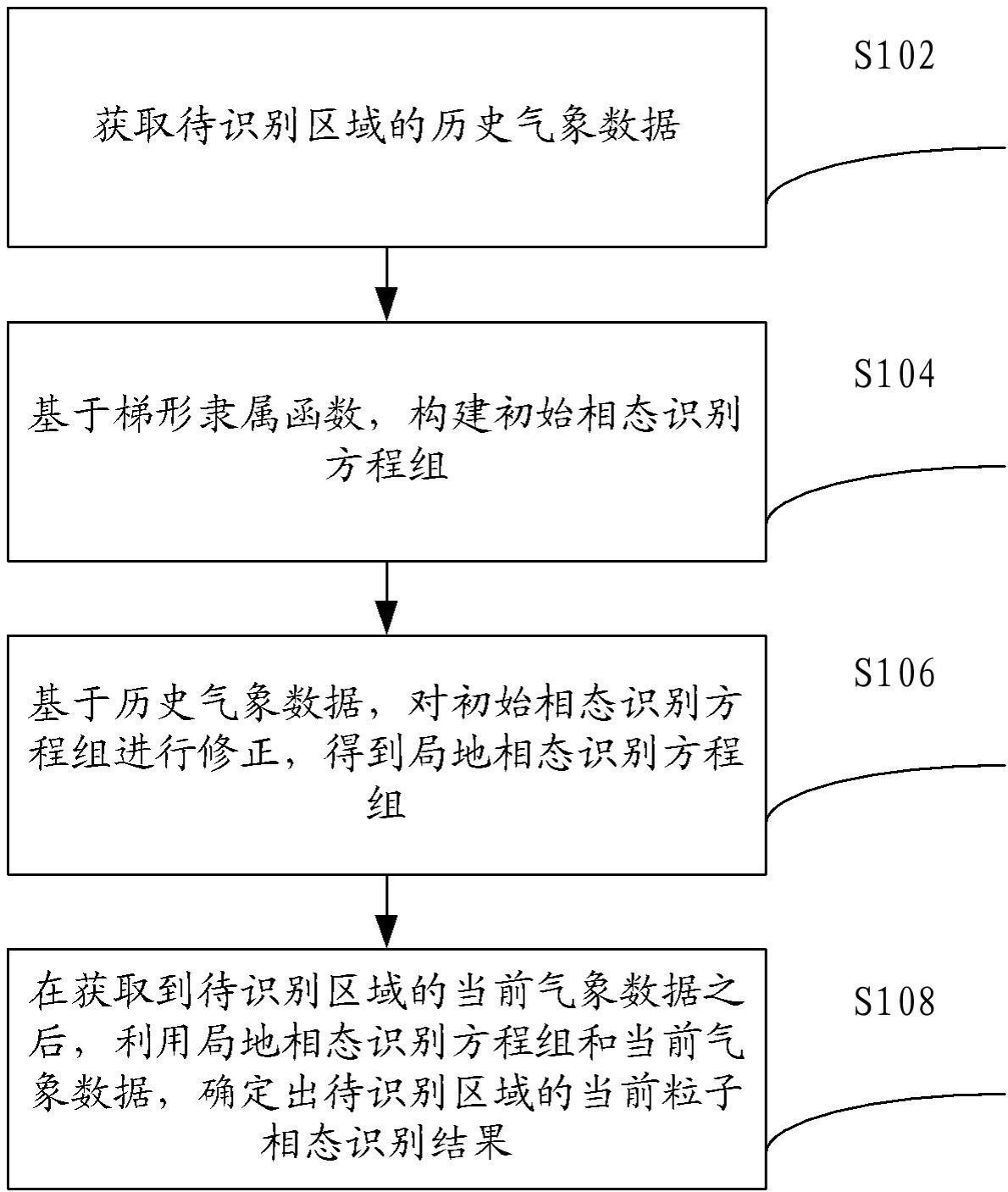
2、第一方面,本发明实施例提供了一种针对粒子相态的动态集合识别方法,包括:获取待识别区域的历史气象数据,其中,气象数据包括:雷达基数据和地面气象站的逐小时温度数据;基于梯形隶属函数,构建初始相态识别方程组;基于所述历史气象数据,对所述初始相态识别方程组进行修正,得到局地相态识别方程组;在获取到所述待识别区域的当前气象数据之后,利用所述局地相态识别方程组和所述当前气象数据,确定出所述待识别区域的当前粒子相态识别结果。
3、进一步地,所述初始相态识别方程组中包含多个初始相态识别方程,一个初始相态识别方程对应一种粒子相态类型 ;所述初始相态识别方程为,其中,,为雷达偏振量对第j类粒子相态的权重系数,为雷达偏振量对第j类粒子相态的模糊基,a为所述梯形隶属函数的宽度,b为所述梯形隶属函数的坡度,m为变量的中值。
4、进一步地,基于所述历史气象数据,对所述初始相态识别方程组进行修正,得到局地相态识别方程组,包括:对所述历史气象数据进行预处理,得到目标历史气象数据;基于所述目标历史气象数据,确定出所述待识别区域的历史降水过程中每次降水过程对应的粒子相态类型;基于所述历史气象数据和所述待识别区域的历史降水过程中每次降水过程对应的粒子相态类型,计算出所述待识别区域的历史降水过程中各种粒子相态类型对应的每次降水过程的雷达偏振量的平均值,其中,雷达偏振量包括:水平反射率因子,差分反射率因子,差分传播相移率因子和相关系数;基于所述雷达偏振量的平均值,对所述初始相态识别方程组进行修正,得到所述局地相态识别方程组。
5、进一步地,对所述历史气象数据进行预处理,得到目标历史气象数据,包括:对历史雷达基数据依次进行解析处理、质控处理、投影处理和三位组网处理,得到目标历史雷达基数据;对历史地面气象站的逐小时温度数据进行插值处理,得到目标历史地面气象站的逐小时温度数据。
6、进一步地,在获取到所述待识别区域的当前气象数据之后,利用所述局地相态识别方程组和所述当前气象数据,确定出所述待识别区域的当前粒子相态识别结果,包括:对所述当前气象数据进行所述预处理,得到目标当前气象数据,其中,所述目标当前气象数据包括:目标当前雷达基数据和目标当前地面气象站的逐小时温度数据;基于所述目标当前雷达基数据和所述局地相态识别方程组,确定出所述待识别区域的初始粒子相态识别结果;基于所述目标当前气象数据和所述初始粒子相态识别结果,确定出所述待识别区域的当前粒子相态识别结果。
7、进一步地,基于所述目标当前雷达基数据和所述局地相态识别方程组,确定出所述待识别区域的初始粒子相态识别结果,包括:利用所述目标当前雷达基数据和所述局地相态识别方程组,计算出所述目标当前雷达基数据的各类粒子相态对应的各个的雷达偏振量的模糊基;基于所述目标当前雷达基数据的各类粒子相态对应的各个的雷达偏振量的模糊基,计算出所述目标当前雷达基数据的各类粒子相态的模糊集;基于最大集成算法,确定出所述目标当前雷达基数据的各类粒子相态的模糊集中的最大模糊基,将所述最大模糊基对应的粒子相态确定为初始粒子相态识别结果。
8、进一步地,基于所述目标当前气象数据和所述初始粒子相态识别结果,确定出所述待识别区域的当前粒子相态识别结果 ,包括:基于粒子相态与地面气象站的逐小时温度数据和雷达偏振量之间的物理经验关系,确定温度阈值判据和雷达偏振量阈值判据;基于所述温度阈值判据和雷达偏振量阈值判据、所述目标当前气象数据和所述初始粒子相态识别结果,确定出所述待识别区域的当前粒子相态识别结果。
9、第二方面,本发明实施例还提供了一种针对粒子相态的动态集合识别装置,包括:获取单元,用于获取待识别区域的历史气象数据,其中,气象数据包括:雷达基数据和地面气象站的逐小时温度数据;构建单元,用于基于梯形隶属函数,构建初始相态识别方程组;修正单元,用于基于所述历史气象数据,对所述初始相态识别方程组进行修正,得到局地相态识别方程组;识别单元,用于在获取到所述待识别区域的当前气象数据之后,利用所述局地相态识别方程组和所述当前气象数据,确定出所述待识别区域的当前粒子相态识别结果。
10、第三方面,本发明实施例还提供了一种电子设备,包括存储器以及处理器,所述存储器用于存储支持处理器执行上述第一方面中所述方法的程序,所述处理器被配置为用于执行所述存储器中存储的程序。
11、第四方面,本发明实施例还提供了一种计算机可读存储介质,计算机可读存储介质上存储有计算机程序。
12、在本发明实施例中,通过获取待识别区域的历史气象数据,其中,气象数据包括:雷达基数据和地面气象站的逐小时温度数据;基于梯形隶属函数,构建初始相态识别方程组;基于所述历史气象数据,对所述初始相态识别方程组进行修正,得到局地相态识别方程组;在获取到所述待识别区域的当前气象数据之后,利用所述局地相态识别方程组和所述当前气象数据,确定出所述待识别区域的当前粒子相态识别结果,达到了能够利用双偏振雷达偏振量对大气中水合物粒子进行区分识别的目的,进而解决了双偏振识别粒子准确性低、可靠性低的技术问题,从而实现了提高相态识别算法准确率与可靠性的技术效果。
13、本发明的其他特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点在说明书、权利要求书以及附图中所特别指出的结构来实现和获得。
14、为使本发明的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
- 还没有人留言评论。精彩留言会获得点赞!