垃圾回收方法、装置、存储介质
本发明涉及一种垃圾回收方法、装置、存储介质,属于垃圾回收。
背景技术:
1、针对垃圾回收的车辆路径问题研究较丰富。张玉州等人基于合作协同进化算法作为基本框架,利用改进的遗传算法对多中心垃圾回收问题进行求解,得出最小车辆运输费用的车辆行驶路线;yaakoubi等考虑到废物容器数量有限,提出了模因算法和迭代局部搜索算法以解决带有时间窗的垃圾回收问题;周双牛等人则考虑碳排放问题,采用改进的dmbso算法进行实验仿真,实现最短路径、最小碳排放量的车辆垃圾回收路径目标。
2、目前,针对不同物品运输的车辆路径问题(vehicle routing problem,vrp)应用研究表现在不同方面,包括一般物品运输vrp、危险品运输vrp、生鲜农产品冷链运输vrp以及其他特殊物品运输vrp。针对此类np-hard问题,不少学者也提出了多种启发式算法,比如:粒子群算法、模拟退火算法、rrt算法等等。
3、其中,沈良等人为研究危险品车辆运输工作,建立了以可靠性和安全性为双目标的数学模型,并利用结合放缩不等式和k短路算法的启发式算法得到安全可靠路径。王新杰等人针对共享物流新模式,考虑客户时间和成本构成,提出了多中心联合取送货模型,并利用“破坏”与“修复”算子提高遗传算法在该问题上的求解能力。张金良等人以节能减排为目标,构建了碳排放影响下的动态配送车辆路径优化模型。
4、虽然传统的车辆路径规划问题已较为成熟且研究内容较丰富,但为了确保工作人员在回收过程中能够减少长时间接触大量存在安全隐患的垃圾而带来不必要的风险,亟需一种风险垃圾回收方法、装置、存储介质。
技术实现思路
1、本发明的目的在于克服现有技术中的不足,提供一种垃圾回收方法、装置、存储介质,建立以风险指数为一级目标、行驶路程为二级目标的问题模型,提出了基于双重优化的遗传算法实现低风险和短路程目标,能够有效确保工作人员的安全,同时资源也被有效利用。
2、为达到上述目的,本发明是采用下述技术方案实现的:
3、第一方面,本发明提供了一种垃圾回收方法,包括以下步骤:
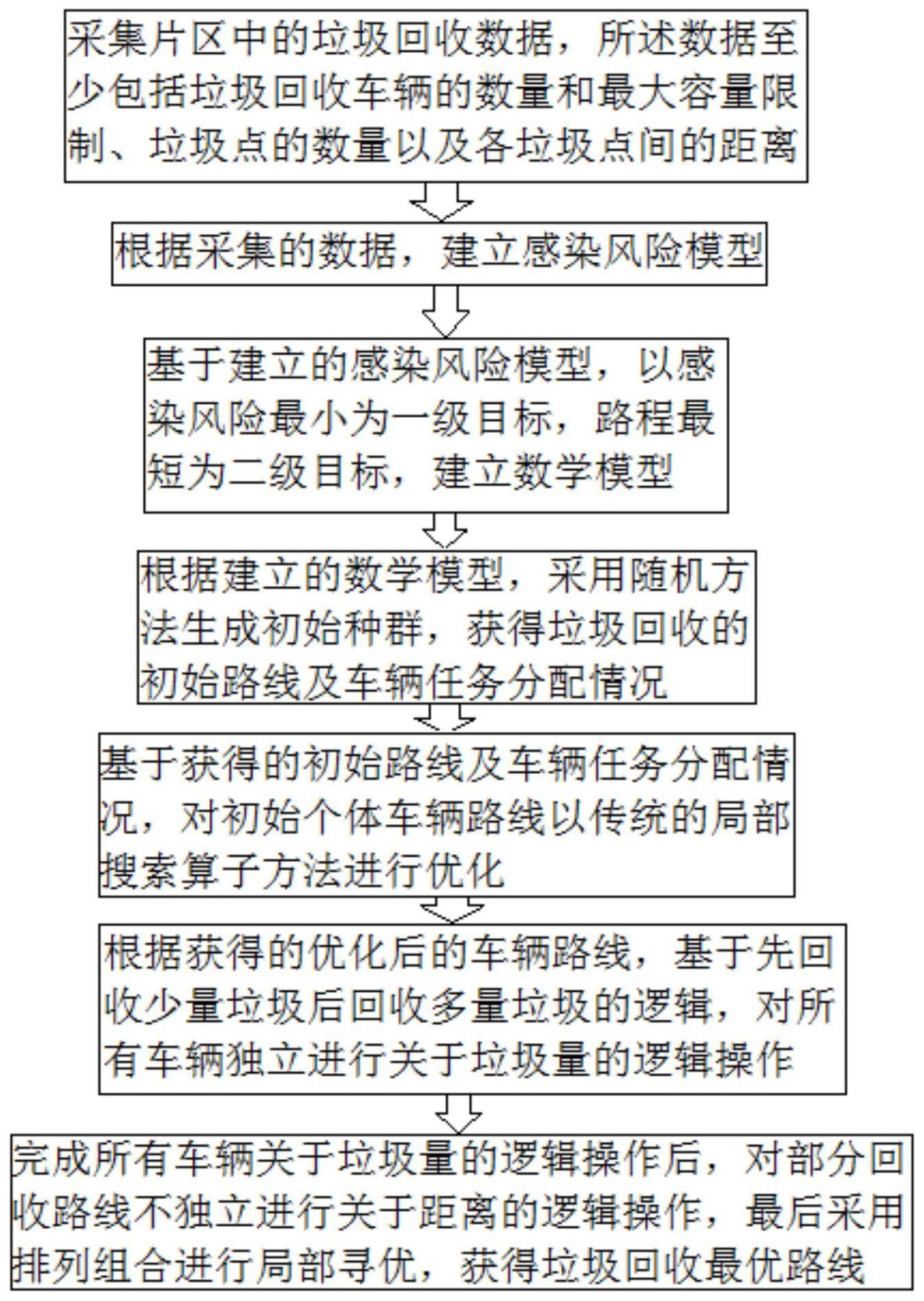
4、采集片区中的垃圾回收数据,所述数据至少包括垃圾回收车辆的数量和最大容量限制、垃圾点的数量以及各垃圾点间的距离;
5、根据采集的数据,建立风险模型;
6、基于建立的风险模型,以风险指数最小为一级目标,路程最短为二级目标,建立数学模型;
7、根据建立的数学模型,采用随机方法生成初始种群,获得垃圾回收的初始路线及车辆任务分配情况;
8、基于获得的初始路线及车辆任务分配情况,对初始个体车辆路线以传统的局部搜索算子方法进行优化;
9、根据获得的优化后的车辆路线,基于先回收少量垃圾后回收多量垃圾的逻辑,对所有车辆独立进行关于垃圾量的逻辑操作;
10、完成所有车辆关于垃圾量的逻辑操作后,对部分回收路线不独立进行关于距离的逻辑操作,最后采用排列组合进行局部寻优,获得垃圾回收最优路线。
11、进一步的,建立的所述风险模型如下:
12、
13、式中,为风险指数,n为居民垃圾点数量,cj表示居民垃圾点j的垃圾量。
14、进一步的,建立的所述数学模型如下:
15、一级目标函数:
16、二级目标函数:
17、
18、
19、
20、
21、
22、0<k≤m,m∈n+ (9)
23、式中,risk为最终整个回收工作所累积的风险;dist为整个回收工作所有车辆行驶路程的总和;θ为风险函数;k为此次参与回收工作的车辆数量,其中k={1,2,...,k}为第k辆车;nk为第k辆车所负责的居民垃圾点数量;为第k辆车从居民垃圾点i到居民垃圾点j的距离;ci为居民垃圾点i的垃圾量;c为车辆最大容量;v为坐标集合v={0,1,...,n},其中v′={1,2,...,n}为居民垃圾点集合,0为垃圾站。
24、进一步的,所述种群初始化包括以下步骤:
25、将n个居民垃圾点按顺序编号并随机排列,按照排列序号依次交由车辆进行垃圾回收工作;
26、若当前车辆回收垃圾超出容量限制,结束该车辆回收工作,将序号依次分配给下一辆车辆,直至完成所有居民垃圾点的回收任务;
27、循环上述操作直至达到种群规模条件。
28、进一步的,所述初始个体车辆路线的优化方法,包括以下步骤:
29、取第k辆车,判断垃圾点i的垃圾数量,若存在唯一点i满足则优先回收点i;若构成一个集合存在满足d0i=max{d},d={d0j|j∈m},则优先回收点i;
30、完成垃圾点i回收工作后,剩余未回收的垃圾点构成集合v0,此时选取满足d0i=min{d},d={d0i|i∈v0}且ci=min{c′},c′={ci|i∈v0}的点i进行下一步回收工作,及时更新v0,直到
31、回到垃圾回收站进行垃圾销毁工作,完成第k辆车的初始优化,若k<k,令k=k+1,转step1;否则,停止算法,完成种群初始优化;
32、其中,ci表示居民垃圾点i的垃圾量,0表示垃圾站,d0i为垃圾站到居民垃圾点i的距离,d0j为垃圾站到居民垃圾点j的距离,d为垃圾站到个垃圾点的距离集合。
33、进一步的,所述所有车辆关于垃圾量的逻辑操作方法,包括以下步骤:
34、设第k辆车第1个回收点为i=1:若ci≤ci+1,则保持原路线;若ci>ci+1,则交换并比较其值选择最优路线;
35、取i=i+1继续对比下一个回收点的垃圾量,重复上述操作,直到i=nk,结束该车辆操作;
36、选择下一辆车辆重复以上步骤,直至完成所有车辆关于垃圾量的逻辑操作;
37、其中,ci表示居民垃圾点i的垃圾量,nk表示第k辆车所负责的居民垃圾点数量。
38、进一步的,所述部分回收路线不独立进行关于距离的逻辑操作方法,包括以下步骤:
39、分别选取两条风险最大的路线和一条风险最大、一条风险最小的路线,其中风险最大的路线记为路线1,风险最小的路线记为路线2;
40、取路线1起始点记为i=0,路线2所有回收点构成集合v2={1,2,...,n2},若di,i+1≤di,j,j∈v2,则保持原路线;若di,i+1>di,j,j∈v2,则互换两点并比较其值选择最优路线;
41、更新v2和i=i+1,继续对比路线1下一个点与路线2所有点的距离,直到i=n1。
42、其中,di,i+1为路线1中起始点至下一个垃圾回收点的距离,di,j为路线1中起始点到路线2中任一垃圾回收点j的距离。
43、第二方面,本发明提供了一种垃圾回收装置,所述装置包括:
44、数据采集模块:用于采集片区中的垃圾回收数据,所述数据至少包括垃圾回收车辆的数量和最大容量限制、垃圾点的数量以及各垃圾点间的距离;
45、风险模型建立模块:用于根据采集的数据,建立风险模型;
46、数学模型建立模块:用于基于建立的风险模型,以风险指数最小为一级目标,路程最短为二级目标,建立数学模型;
47、种群初始化模块:用于根据建立的数学模型,采用随机方法生成初始种群,获得垃圾回收的初始路线及车辆任务分配情况;
48、路线优化模块:用于基于获得的初始路线及车辆任务分配情况,对初始个体车辆路线以传统的局部搜索算子方法进行优化;
49、逻辑操作模块:用于根据获得的优化后的车辆路线,基于先回收少量垃圾后回收多量垃圾的逻辑,对所有车辆独立进行关于垃圾量的逻辑操作;
50、局部寻优模块:用于完成所有车辆关于垃圾量的逻辑操作后,对部分回收路线不独立进行关于距离的逻辑操作,最后采用排列组合进行局部寻优,获得垃圾回收最优路线。
51、第三方面,本发明提供了一种垃圾回收设备,包括处理器及存储介质;
52、所述存储介质用于存储指令;
53、所述处理器用于根据所述指令进行操作以执行第一方面所述方法的步骤。
54、第四方面,本发明提供了一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现第一方面所述方法的步骤。
55、与现有技术相比,本发明所达到的有益效果:
56、本发明提供的垃圾回收方法、装置、存储介质,建立以风险指数为一级目标、行驶路程为二级目标的问题模型,提出了基于双重优化的遗传算法实现低风险和短路程目标,能够有效确保工作人员的安全,同时资源也被有效利用。
- 还没有人留言评论。精彩留言会获得点赞!