车辆属性信息的识别方法、装置、电子设备及存储介质与流程
本发明涉及车辆信息识别,具体而言,涉及一种车辆属性信息的识别方法、装置、电子设备及存储介质。
背景技术:
1、随着ai人工智能的不断发展,智慧交通逐渐兴起。在实现智慧交通过程中,如何对车辆属性信息进行识别是一个亟待解决的问题。现有技术中,一般通过计算机视觉算法提取车辆图像的边缘特征,以识别车辆属性信息。
2、但是,由于光照、摄像机、场景等因素的影响,车辆图像会受到模糊和噪声的影响,导致通过计算机视觉算法去识别得到的车辆属性信息的结果不准确。
技术实现思路
1、有鉴于此,本技术的目的在于提供一种车辆属性信息的识别方法、装置、电子设备及存储介质,能够识别图像中车辆的属性信息,提高了识别车辆属性信息的准确率。
2、第一方面,本技术实施例提供了一种车辆属性信息的识别方法,车辆属性信息的识别方法包括:
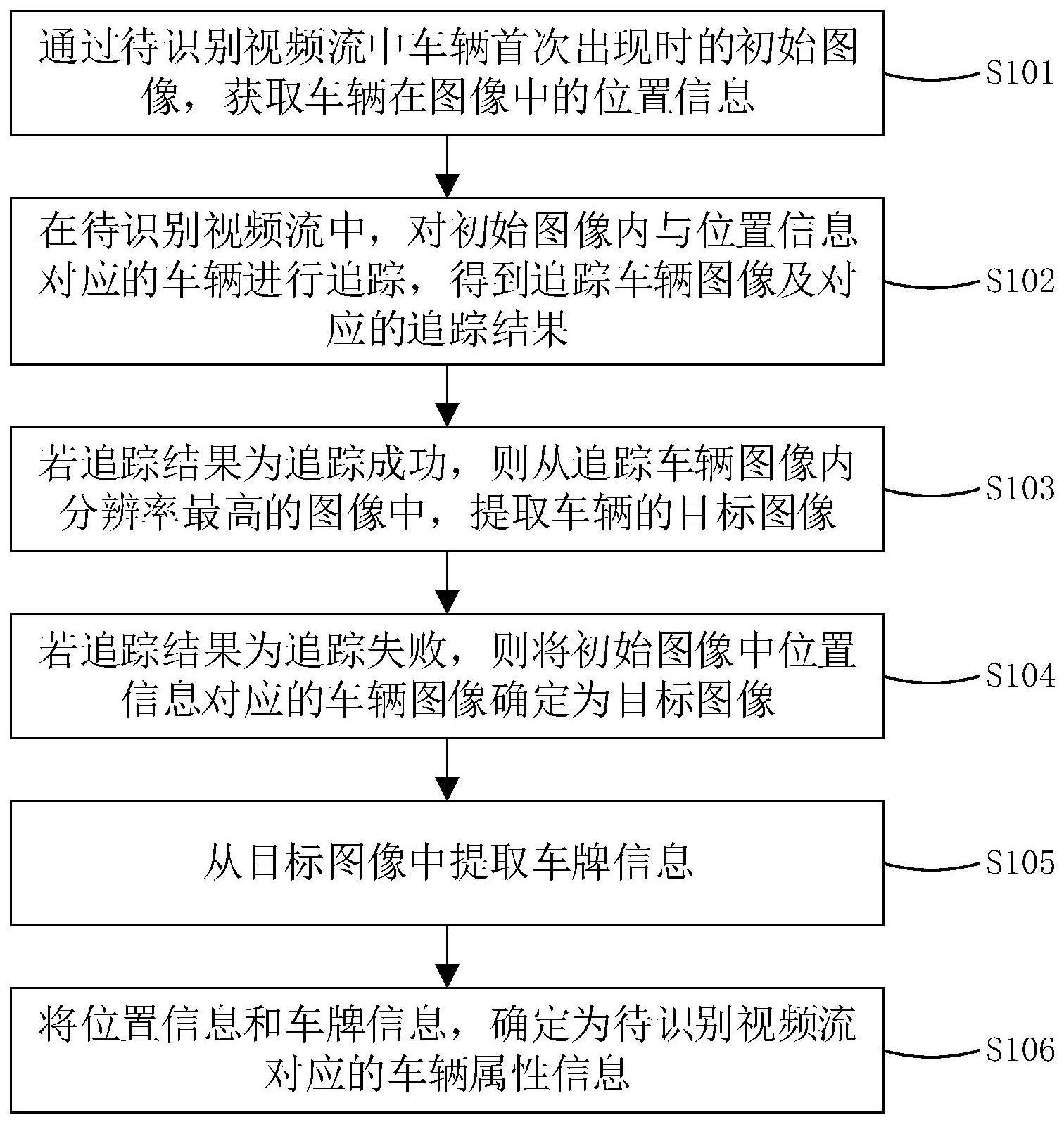
3、通过待识别视频流中车辆首次出现时的初始图像,获取车辆在图像中的位置信息;
4、在待识别视频流中,对初始图像内与位置信息对应的车辆进行追踪,得到追踪车辆图像及对应的追踪结果;
5、若追踪结果为追踪成功,则从追踪车辆图像内分辨率最高的图像中,提取车辆的目标图像;
6、若追踪结果为追踪失败,则将初始图像中位置信息对应的车辆图像确定为目标图像;
7、从目标图像中提取车牌信息;
8、将位置信息和车牌信息,确定为待识别视频流对应的车辆属性信息。
9、在一种可能的实施方式中,通过待识别视频流中车辆首次出现时的初始图像,获取车辆在所述图像中的位置信息,包括:
10、将车辆样本图像输入到车辆属性识别模型中,得到车辆在车辆样本图像中的识别位置信息;其中,车辆样本图像中携带有车辆在图像中的实际位置信息;
11、根据车辆样本图像中与识别位置信息对应的识别框、与实际位置信息对应的实际框,确定车辆属性识别模型的损失值;
12、通过损失值对车辆属性识别模型进行模型训练,直至损失值小于预设阈值;
13、将初始图像输入到训练完成的车辆属性识别模型中,得到车辆在图像中的位置信息。
14、在一种可能的实施方式中,根据车辆样本图像中与识别位置信息对应的识别框、与实际位置信息对应的实际框,确定车辆属性识别模型的损失值,包括:
15、通过下述损失值公式确定损失值;
16、
17、其中,ciouloss为损失值;iou为实际框与识别框的交并比,distance2为实际框与识别框的中心点的距离,distancec2为实际框与识别框的外接矩形对角线的距离,v是实际框与识别框的长宽比的一致性参数。
18、在一种可能的实施方式中,识别位置信息包括车辆轮廓识别位置信息和车辆车标识别位置信息;实际位置信息包括车辆轮廓实际位置信息和车辆车标实际位置信息,根据车辆样本图像中与识别位置信息对应的识别框、与实际位置信息对应的实际框,确定车辆属性识别模型的损失值,包括:
19、将车辆样本图像中与车辆轮廓识别位置信息对应的识别框、与车辆轮廓实际位置信息对应的实际框代入所述损失值公式,得到车辆属性识别模型的第一损失值;
20、将车辆样本图像中与车辆车标识别位置信息对应的识别框、与车辆车标实际位置信息对应的实际框代入损失值公式,确定车辆属性识别模型的第二损失值。
21、在一种可能的实施方式中,通过下述公式确定实际框与识别框的长宽比的一致性参数;
22、
23、其中,v为实际框与识别框的长宽比的一致性参数,gt为实际框,p为识别框,为实际框的宽,为实际框的高,wp为识别框的宽,hp为识别框的高。
24、在一种可能的实施方式中,若追踪结果为追踪成功,该方法还包括:
25、识别追踪车辆图像中,时间最早的第一追踪车辆图像内包含的第一标志物;
26、识别追踪车辆图像中,时间最晚的第二追踪车辆图像内包含的第二标志物;第一标志物和第二标志物均为标志数据库中存储的标志物,标志物携带有位置信息;
27、根据第一标志物对应的位置信息和第二标志物对应的位置信息,确定追踪车辆图像中的追踪车辆的行驶距离;并确定第一追踪车辆图像对应的时间与第二追踪车辆图像对应的时间之间的差值,得到追踪车辆图像中的追踪车辆的行驶时长;
28、根据行驶距离、行驶时长,计算追踪车辆图像中的追踪车辆的行驶速度。
29、在一种可能的实施方式中,从目标图像中提取车牌信息,包括:
30、将目标图像输入到车牌属性识别模型中,得到车牌信息;车牌信息中包括车牌位置信息;
31、将目标图像中与车牌位置信息对应的车牌图像进行纠正变换;
32、将纠正变换后的车牌图像输入到车牌字符识别模型中,得到车牌字符信息;
33、其中,车牌属性识别模型通过车牌样本图像及对应的车牌信息训练得到的;车牌字符识别模型通过车牌字符样本图像及对应的车牌字符信息训练得到的。
34、第二方面,本技术实施例还提供了一种车辆属性信息的识别装置,该车辆属性信息的识别装置包括:
35、获取模块,用于通过待识别视频流中车辆首次出现时的初始图像,获取车辆在图像中的位置信息;
36、追踪模块,用于在待识别视频流中,对初始图像内与位置信息对应的车辆进行追踪,得到追踪车辆图像及对应的追踪结果;
37、提取模块,用于若追踪结果为追踪成功,则从追踪车辆图像内分辨率最高的图像中,提取车辆的目标图像;
38、确定模块,用于若追踪结果为追踪失败,则将初始图像中与位置信息对应的车辆图像确定为目标图像;
39、提取模块,还用于从目标图像中提取车牌信息;
40、确定模块,还用于将所述位置信息和所述车牌信息,确定为所述待识别视频流对应的车辆属性信息。
41、在一种可能的实施方式中,获取模块,具体用于将车辆样本图像输入到车辆属性识别模型中,得到车辆在车辆样本图像中的识别位置信息;其中,车辆样本图像中携带有车辆在图像中的实际位置信息;根据车辆样本图像中与识别位置信息对应的识别框、与实际位置信息对应的实际框,确定车辆属性识别模型的损失值;通过损失值对车辆属性识别模型进行模型训练,直至损失值小于预设阈值;将初始图像输入到训练完成的车辆属性识别模型中,得到车辆在图像中的位置信息。
42、在一种可能的实施方式中,确定模块,具体用于通过下述损失值公式确定损失值;
43、
44、其中,ciouloss为损失值;iou为实际框与识别框的交并比,distance2为实际框与识别框的中心点的距离,distancec2为实际框与识别框的外接矩形对角线的距离,v是实际框与识别框的长宽比的一致性参数。
45、在一种可能的实施方式中,识别位置信息包括车辆轮廓识别位置信息和车辆车标识别位置信息;实际位置信息包括车辆轮廓实际位置信息和车辆车标实际位置信息,确定模块,具体用于将车辆样本图像中与车辆轮廓识别位置信息对应的识别框、与车辆轮廓实际位置信息对应的实际框代入所述损失值公式,得到车辆属性识别模型的第一损失值;将车辆样本图像中与车辆车标识别位置信息对应的识别框、与车辆车标实际位置信息对应的实际框代入损失值公式,确定车辆属性识别模型的第二损失值。
46、在一种可能的实施方式中,确定模块,还用于:
47、
48、其中,v为实际框与识别框的长宽比的一致性参数,gt为实际框,p为识别框,为实际框的宽,为实际框的高,wp为识别框的宽,hp为识别框的高。
49、在一种可能的实施方式中,若追踪结果为追踪成功,该装置还包括:识别模块,计算模块;
50、识别模块,用于识别追踪车辆图像中,时间最早的第一追踪车辆图像内包含的第一标志物;
51、识别模块,还用于识别追踪车辆图像中,时间最晚的第二追踪车辆图像内包含的第二标志物;第一标志物和第二标志物均为标志数据库中存储的标志物,标志物携带有位置信息;
52、确定模块,还用于根据第一标志物对应的位置信息和第二标志物对应的位置信息,确定追踪车辆图像中的追踪车辆的行驶距离;并确定第一追踪车辆图像对应的时间与第二追踪车辆图像对应的时间之间的差值,得到追踪车辆图像中的追踪车辆的行驶时长;
53、计算模块,用于根据行驶距离、行驶时长,计算追踪车辆图像中的追踪车辆的行驶速度。
54、在一种可能的实施方式中,提取模块,具体用于将目标图像输入到车牌属性识别模型中,得到车牌信息;车牌信息中包括车牌位置信息;将目标图像中与车牌位置信息对应的车牌图像进行纠正变换;将纠正变换后的车牌图像输入到车牌字符识别模型中,得到车牌字符信息;其中,车牌属性识别模型通过车牌样本图像及对应的车牌信息训练得到的;车牌字符识别模型通过车牌字符样本图像及对应的车牌字符信息训练得到的。
55、第三方面,本技术实施例还提供了一种电子设备,包括:处理器、存储介质和总线,存储介质存储有处理器可执行的机器可读指令,当电子设备运行时,处理器与存储介质之间通过总线通信,处理器执行所述机器可读指令,以执行如第一方面任一项车辆属性信息的识别方法的步骤。
56、第四方面,本技术实施例还提供了一种计算机可读存储介质,计算机可读存储介质上存储有计算机程序,计算机程序被处理器运行时执行如第一方面任一项车辆属性信息的识别方法的步骤。
57、本技术实施例提供了一种车辆属性信息的识别方法、装置、电子设备及存储介质,该方法包括:通过待识别视频流中车辆首次出现时的初始图像,获取车辆在图像中的位置信息;在待识别视频流中,对初始图像内与位置信息对应的车辆进行追踪,得到追踪车辆图像及对应的追踪结果;若追踪结果为追踪成功,则从追踪车辆图像内分辨率最高的图像中,提取车辆的目标图像;若追踪结果为追踪失败,则将初始图像中位置信息对应的车辆图像确定为目标图像;从目标图像中提取车牌信息;将位置信息和车牌信息,确定为待识别视频流对应的车辆属性信息。本技术在待识别视频流中,对车辆首次出现时的初始图像进行追踪,根据追踪结果确定目标图像,并从目标图像中获取车牌信息,以得到车辆属性信息,提高了识别车辆属性信息的准确率。
- 还没有人留言评论。精彩留言会获得点赞!