一种空间折线要素条件布朗运动误差度量方法及系统
本发明涉及空间数据折线要素位置误差度量的,尤其涉及一种空间折线要素条件布朗运动误差度量方法及系统。
背景技术:
1、空间数据是测绘与地理信息科学领域的重要数据基础。空间数据的质量是保证其有效应用的重要基础和前提条件。如何评价空间数据的质量是地理信息科学领域的基础理论问题。通过各种数据测量手段获得的空间数据中通常将真实地物表达为点、线、面、体、场要素。其中,空间折线要素是地理空间对象表达的重要基础要素。但是空间折线要素普遍包含多种数据误差,其误差度量是评估空间数据质量的关键问题。
2、针对空间折线要素的质量评估问题,国内外学者们已提出了多种针对折线要素测量误差建模的经典方法,如ε-带,g带模型等。主要是基于折线顶点的测量误差的统计特性构建误差模型,折线顶点间的中间点的误差利用线性模型内插传播得到。但是,目前主要的误差带模型通常只关注折线顶点的测量误差,而没有考虑用折线段近似表示真实地物所带来的模型误差的影响。造成误差带模型在观测顶点处误差大,而顶点之间的位置误差相对较小,与测量误差的普遍认知相悖。
3、本发明针对空间折线要素同时包含顶点测量误差和折线段的近似表达模型误差的情况,构建一种度量空间折线要素位置误差的条件布朗运动误差模型,将折线顶点测量误差与模型误差耦合为布朗运动随机过程,得到顶点之间误差大于两端顶点误差的凸集误差模型,解决了空间折线要素误差度量中模型误差缺失的问题。
技术实现思路
1、本部分的目的在于概述本发明的实施例的一些方面以及简要介绍一些较佳实施例。在本部分以及本技术的说明书摘要和发明名称中可能会做些简化或省略以避免使本部分、说明书摘要和发明名称的目的模糊,而这种简化或省略不能用于限制本发明的范围。
2、鉴于上述现有存在的问题,提出了本发明。
3、因此,本发明目的是提供一种空间折线要素条件布朗运动误差度量方法及系统解决空间折线要素误差度量中模型误差缺失的问题。
4、为解决上述技术问题,本发明提供如下技术方案:
5、第一方面,本发明实施例提供了一种空间折线要素条件布朗运动误差度量方法,包括:
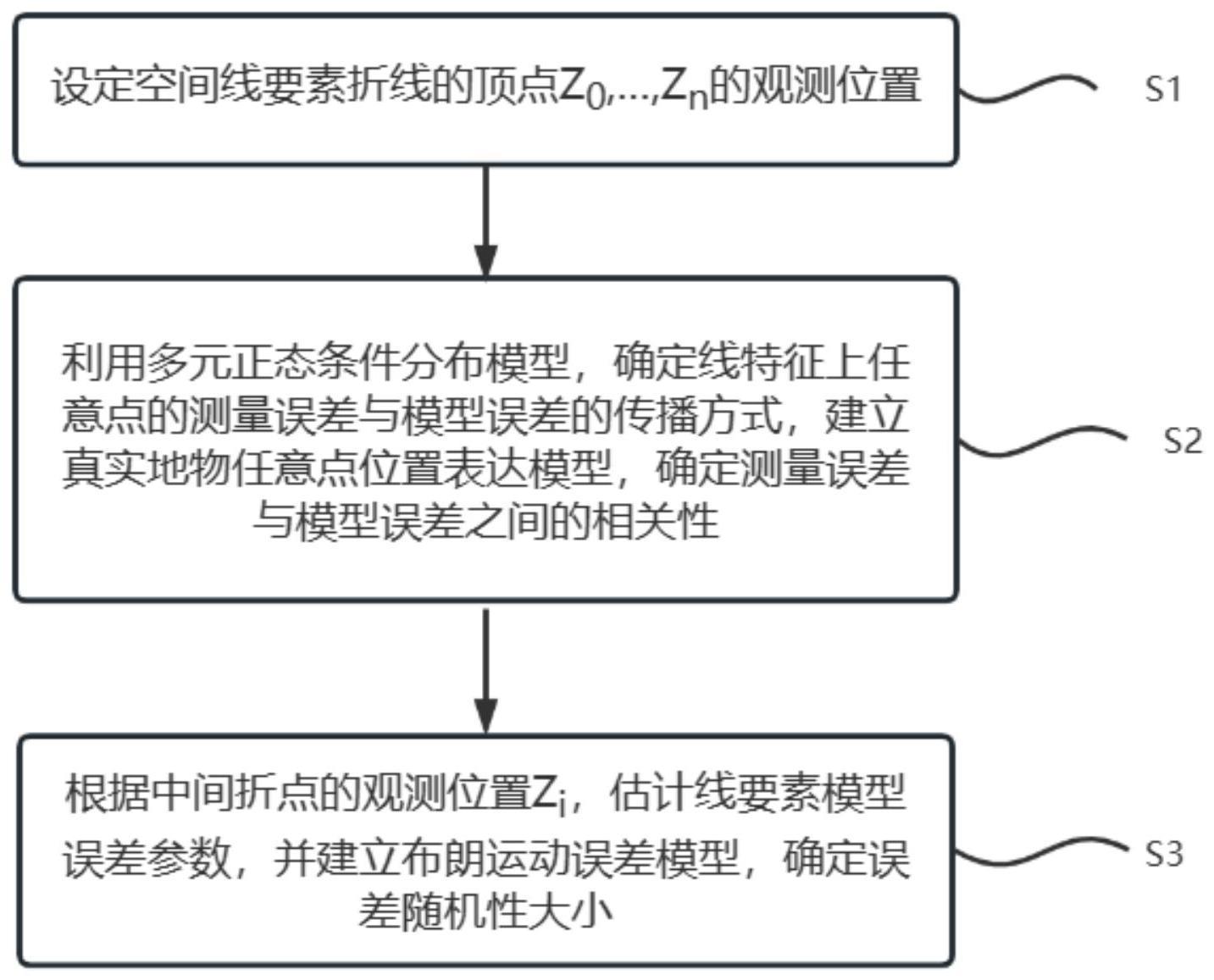
6、设定空间线要素折线的顶点z0,…,zn的观测位置;
7、利用多元正态条件分布模型,确定线特征上任意点的测量误差与模型误差的传播方式,建立真实地物任意点位置表达模型,确定测量误差与模型误差之间的相关性;
8、根据中间折点的观测位置zi,估计线要素模型误差参数,并建立布朗运动误差模型,确定误差随机性大小。
9、作为本发明所述一种空间折线要素条件布朗运动误差度量方法,其中:建立真实地物任意点位置表达模型包括,
10、建立相邻顶点间的真实地物位置分布的布朗运动模型以及附加顶点观测条件的真实地物任意点位置分布模型。
11、作为本发明所述一种空间折线要素条件布朗运动误差度量方法,其中:建立相邻顶点间的真实地物位置分布的布朗运动模型包括,
12、设定折线(z0,…,zn)的顶点坐标向量为服从2n维正态分布如下:
13、sn~n(μ,σ)
14、其中,表示期望向量,μi表示顶点zi的期望,σ表示折线顶点间的协方差矩阵;
15、设定折线(z0,…,zn)近似表示的真实地物的位置为{z(t),t∈[0,d]},表示一个随机过程;
16、其中,t表示z(t)的期望位置…(t)沿着折线(z0,…,zn)的期望位置折线(μ0,…,μ2)到顶点z0期望位置μ0的距离,d表示折线两顶点z0和zn期望位置沿着期望位置折线(μ0,…,μn)的间距;
17、设定真实地物上一点z(t)的误差向量为ξ(t),根据误差向量定义,ξ(t)=z(t)-μ(t),则在距离微元δt内采用布朗运动描述ξ(t)如下:
18、
19、其中,δξ(t)表示两个相邻点z(t)和z(t+δt)的误差增量,δt表示距离微元,ξ(t)表示真实地物上一点z(t)的误差向量,σb表示δξ(t)在单位距离上的方差。
20、作为本发明所述一种空间折线要素条件布朗运动误差度量方法,其中:建立附加顶点观测条件的真实地物任意点位置分布模型包括,
21、对于真实地物上任意一点位置z(t),其落在折线(z0,…,zn)任意两个顶点zi和zi+1间,位置z(t)同时受到顶点zi和zi+1和的影响,设定t为z(t)的期望位置μ(t)到顶点zi期望位置μi的距离,则真实地物上一点z(t)的误差向量ξ(t)分为与左右顶点zi和zi+1相关的两部分得到ξ(t)=ξi(di-t)+ξi+1(t),其中di=|μiμi+1|为顶点zi和zi+1间的期望位置间距;
22、运用多元正态条件分布公式,在ξi+1(0)=0、ξi+1(di)=zi+1-μi+1的条件下,得到ξi+1(t)的公式;
23、当zi+1与bi+1(t)相关,且为bi+1(t)的函数时,两者参数域相等,推导得到ξi+1(t)的公式;
24、根据上述条件得到ξ(t)公式如下:
25、
26、其中,bi(·)和bi+1(·)表示与顶点zi和zi+1相关的误差向量,di=|μiμi+1|为折线顶点zi和zi+1期望位置间距,t表示z(t)的期望位置μ(t)到顶点zi期望位置μi的距离,aii为折线顶点zi和zi+1间的模型误差参数;
27、根据误差向量定义,ξ(t)=z(t)-μ(t),可知z(t)=ξ(t)+μ(t)=ξi(di-t)+ξi+1(t)+μ(t),μ(t)表示期望位置;
28、作为本发明所述一种空间折线要素条件布朗运动误差度量方法,其中:得到真实地物任意点位置坐标公式如下:
29、
30、其中,bi(·)和bi+1(·)表示与顶点zi和zi+1相关的误差向量,是期望值为0的布朗运动,其中表示与顶点zj相关的单位距离误差方差,μi表示顶点zi的期望,di=|μiμi+1|表示顶点zi和zi+1间的期望位置间距,t表示z(t)的期望位置μ(t)到顶点zi期望位置μi的距离,aii表示顶点zi和zi+1间的模型误差参数。
31、单位距离误差与端点误差的关系为:
32、
33、真实地物任意点位置的期望和方差公式如下:
34、
35、
36、其中,μi表示顶点zi的期望,σii表示顶点zi的协方差矩阵,σij表示顶点zi、zj间的协方差矩阵,σb表示位置差异δz(t)相对单位距离而言的误差方差。
37、作为本发明所述一种空间折线要素条件布朗运动误差度量方法,其中:根据中间折点的观测位置zi,估计线要素模型误差参数,并建立布朗运动误差模型包括建立线要素模型误差参数和线要素布朗运动误差模型;
38、作为本发明所述一种空间折线要素条件布朗运动误差度量方法,其中:建立线要素模型误差参数包括,
39、设定zi为线段z0zn上的一点,zi的相对位置为ti,得到di=|μiμi+1|,d*=|μ0μn|,根据zi服从正态分布得出zi的位置z(ti)、期望μ(ti)、方差σ(ti)和概率密度函数f(z)如下:
40、
41、
42、
43、
44、其中,a*表示线段z0zn上与模型误差相关的参数。
45、根据顶点zi的观测值服从正态分布,设定顶点z0、zn均落在均值附近,zi落在误差椭圆边界上,位置记为{zi,i}i=0,1,2,…,n;
46、构建极大似然函数并取对数lnl(a),当其值最大时,得出决定模型误差大小的参数a*;
47、根据顶点z0和zn相关的单位距离误差方差σb不变原则,求得真实地物任意点位置坐标公式中顶点zi和zi+1间的模型误差参数aii如下:
48、
49、作为本发明所述一种空间折线要素条件布朗运动误差度量方法,其中:构建线要素布朗运动误差模型包括,
50、已知线要素所表达的真实地物任意点位置为z(t),其误差椭圆公式如下:
51、
52、线要素上所有点的误差椭圆叠加边界到线要素的垂距为h(t):
53、
54、其中,e、f分别表示误差椭圆的短半轴和长半轴,r表示误差椭圆轴长与标准误差椭圆轴长的比值,(x,y)表示误差椭圆上任意点的位置,(x0,y0)表示将误差椭圆旋转平移到“短轴与x轴重合长轴与y轴重合”时误差椭圆上任意点的位置,α表示旋转角度,ht(t0)表示误差带边界在线要素两侧的垂距。
55、第二方面,本发明实施例提供了一种空间折线要素条件布朗运动误差度量系统,包括,
56、设定模块,设定空间线要素折线的顶点z0,…,zn的观测位置;
57、模型搭建模块,利用多元正态条件分布模型,确定线特征上任意点的测量误差与模型误差的传播方式,建立真实地物任意点位置表达模型,确定测量误差与模型误差之间的相关性,根据中间折点的观测位置zi,估计线要素模型误差参数,并建立布朗运动误差模型,确定误差随机性大小。
58、第三方面,本发明实施例提供了一种计算机可读存储介质,其存储有计算机可执行指令,该计算机可执行指令被处理器执行时实现所述空间折线要素条件布朗运动误差度量方法。
59、本发明的有益效果:本发明建立了基于条件分布的布朗运动折线误差带模型,建立了测量误差与模型误差间的相关性模型,并构建了一种线要素处处具有随机性的随机过程误差传播方式,解决了空间折线要素误差度量中模型误差缺失的问题。
- 还没有人留言评论。精彩留言会获得点赞!