一种建筑全过程数字点云校正处理方法与流程
本发明涉及点云校正的,尤其涉及一种建筑全过程数字点云校正处理方法。
背景技术:
1、目前在现代化建筑生产过程中主要通过人工标定和机械自动化灌装完成建筑任务。首先通过建筑工人进行建筑骨架离线标定,然后利用灌装设备到达指定位置完成建筑任务。然而,工业现场中目标工件多为平面弱几何轮廓结构。平面弱几何轮廓结构主要是指整体以平面特征为主的被测物,其轮廓几何特征单一、表面法向量变化有限且表面纹理较少。同时由于存在灌装设备自身结构参数,工件标定结果、系统开环控制等存在偏差等影响因素,导致无法完成严格公差下的建筑任务,使得建筑物与实际预期建筑存在弱偏差,该种类型弱偏差虽然在低楼层建筑中无较大影响,但是随着建筑物高度的提升,存在偏差积累效应,具有一定的安全隐患。针对该问题,本发明提出一种建筑全过程数字点云校正处理方法,实现建筑全过程的精准误差控制和校正。
技术实现思路
1、有鉴于此,本发明提供一种建筑全过程数字点云校正处理方法,目的在于:1)基于目标建筑当前状态的三维点云数据,建立由相机拍摄像素坐标与世界坐标之间的映射转换关系,进而将三维点云数据由相机坐标系转换到世界坐标系,并采取相同方法得到三维点云数据与建筑设计目标三维数据之间的变换参数,通过结合极坐标系下三维点云坐标的极角以及建筑设计目标三维坐标的极角进行两者的相似度计算,以表征三维数据在方向上的差异性,若相似度计算结果小于指定阈值,则表示当前建筑状态与建筑设计目标存在较大差异,因此基于变换参数对当前建筑状态的三维点云数据进行校正,并根据校正结果对当前建筑进行对应的校正处理,实现建筑全过程数字点云校正处理;2)通过构建三维点云数据增强模型,在不同分辨率下对点云数据进行采样处理,对不同分辨率的采样结果进行编码处理,形成多层次编码特征,进而对多层次编码特征进行感知以及上采样处理,得到不同分辨率下的缺失点云坐标,将不同分辨率下的缺失点云坐标同原始点云坐标进行结合,形成补全增强后的三维点云坐标集合,实现缺失点云数据的补全增强。
2、实现上述目的,本发明提供的一种建筑全过程数字点云校正处理方法,包括以下步骤:
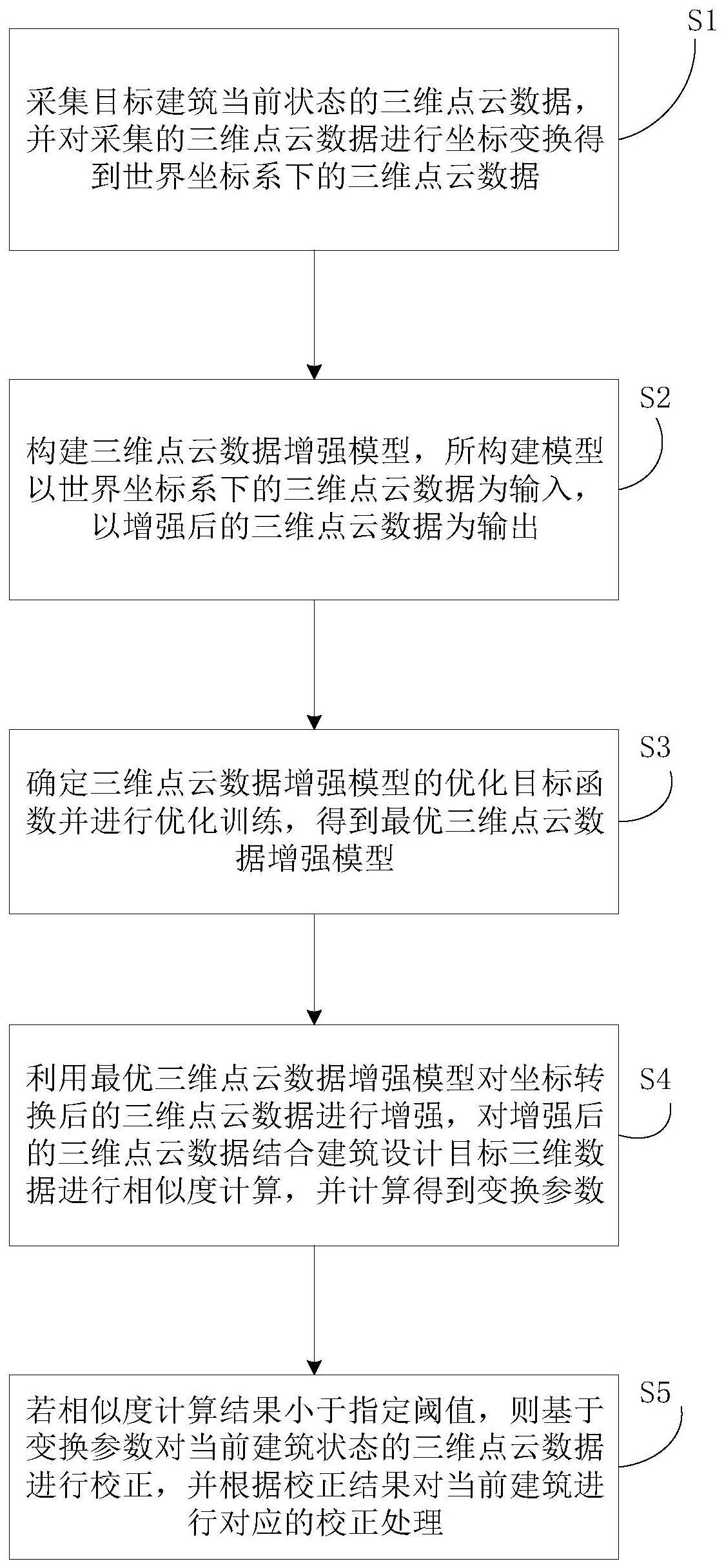
3、s1:采集目标建筑当前状态的三维点云数据,并对采集的三维点云数据进行坐标变换得到世界坐标系下的三维点云数据;
4、s2:构建三维点云数据增强模型,所构建模型以世界坐标系下的三维点云数据为输入,以增强后的三维点云数据为输出;
5、s3:确定三维点云数据增强模型的优化目标函数并进行优化训练,得到最优三维点云数据增强模型;
6、s4:利用最优三维点云数据增强模型对坐标转换后的三维点云数据进行增强,对增强后的三维点云数据结合建筑设计目标三维数据进行相似度计算,并计算得到变换参数;
7、s5:若相似度计算结果小于指定阈值,则基于变换参数对当前建筑状态的三维点云数据进行校正,并根据校正结果对当前建筑进行对应的校正处理。
8、作为本发明的进一步改进方法:
9、可选地,所述s1步骤中采集目标建筑当前状态的三维点云数据,包括:
10、利用相机采集目标建筑当前状态的三维点云数据,所述相机由rgb彩色相机以及一个深度相机组成,rgb彩色相机用于获取目标建筑的彩色信息,深度相机用于获取目标建筑的深度信息,相机所拍摄目标建筑的图像为i,将图像i中任意像素i(x,y)转换为三维点云坐标的公式为:
11、
12、其中:
13、g(x,y,z)表示目标建筑图像中像素i(x,y)对应的三维点云坐标,像素i(x,y)表示目标建筑图像i中第x行第y列的像素;
14、cx表示相机在水平方向的主点,cy表示相机在竖直方向的主点;
15、fx表示相机在水平方向的焦距,fy表示相机在竖直方向的焦距;
16、dx,y表示深度相机部分拍摄得到的像素i(x,y)的深度信息;
17、并利用rgb彩色相机获取像素在rgb颜色通道的颜色值,构成三维点云数据,其中像素i(x,y)的三维点云数据为(g(x,y,z),r(x,y),g(x,y),b(x,y)},其中r(x,y),g(x,y),b(x,y)分别表示像素i(x,y)在rgb颜色通道的颜色值。
18、在本发明实施例中,所述相机的主点和焦距均为相机内部参数,即已知参数信息。
19、可选地,所述s1步骤中对采集的三维点云数据进行坐标变换得到世界坐标系下的三维点云数据,包括:
20、对所采集的三维点云数据进行坐标变换,其中坐标变换对象为三维点云数据中的三维点云坐标,将三维点云坐标变换到世界坐标系下,其中对于三维点云坐标的坐标系变换公式为:
21、g′(x,y,z)=rg(x,y,z)t+h
22、其中:
23、r表示当前点云坐标系与世界坐标系之间的旋转矩阵,h表示平移矩阵;
24、t表示转置;
25、g′(x,y,z)表示三维点云坐标g(x,y,z)的坐标变换结果;
26、所述旋转矩阵以及平移矩阵的计算流程为:
27、s11:利用相机拍摄得到n个已知世界坐标系下坐标的三维点云坐标:
28、{(pi,qi)|i∈[1,n]}
29、其中:
30、pi表示相机所拍摄得到的第i个三维点云坐标,qi表示pi在世界坐标系下的坐标;
31、s12:对坐标进行标准化处理:
32、
33、
34、其中:
35、分别为pi,qi的标准化处理后结果;
36、s13:将标准化处理后的坐标分别构成矩阵p和矩阵q:
37、
38、
39、s14:计算得到变换矩阵a和b:
40、a=ptq
41、b=pqt
42、s15:分别计算得到变换矩阵a和b的n个特征值和特征向量,并按特征值由大到小顺序对特征向量进行排序,其中变换矩阵a的n个特征向量为:
43、(α1,α2,...,αi,...,αn)
44、其中:
45、αi表示变换矩阵a中第i个特征向量;
46、变换矩阵b的n个特征向量为:
47、(β1,β2,...,βi,...,βn)
48、其中:
49、βi表示变换矩阵b中第i个特征向量;
50、s16:将特征向量分别构成矩阵形式α,β:
51、α=[α1,α2,...,αi,...,αn]
52、β=[β1,β2,...,βi,...,βn]
53、s17:计算得到当前点云坐标系与世界坐标系之间的旋转矩阵r,以及平移矩阵h:
54、r=αβt
55、h=q-rp
56、利用计算得到的旋转矩阵r以及平移矩阵h将三维点云数据中的三维点云坐标变换到世界坐标系下。
57、可选地,所述s2步骤中构建三维点云数据增强模型,包括:
58、构建三维点云数据增强模型,所构建三维点云数据增强模型以世界坐标系下的三维点云数据为输入,以增强后的三维点云数据为输出;
59、所构建三维点云数据增强模型包括输入层、多层次编码层以及解码点云增强层,其中输入层用于接收三维点云数据,并对所接收的三维点云数据进行多分辨率下采样处理,多层次编码层用于对不同分辨率的采样结果进行编码处理,形成多层次编码特征,解码点云增强层用于对多层次编码特征进行解码处理,对不同分辨率下的采样结果进行缺失部分补全,得到增强后的三维点云数据;
60、基于三维点云数据增强模型的增强流程为:
61、s21:以世界坐标系下的三维点云数据data为输入,其中data中包含d组世界坐标系下的三维点云坐标以及坐标所对应的颜色值;
62、s22:输入层对d组三维点云坐标进行d/2,d/4,d/8的分辨率采样,得到三组采样结果,其中d/2分辨率的采样流程为:
63、s221:从d组三维点云坐标中选取一个坐标作为起始点,构建采样点集合,将起始点添加到采样点集合中;
64、s222:计算采样点集合外坐标到起始点的距离,并选取距离最大的坐标添加到采样点集合中;
65、s223:计算采样点集合外坐标到采样点集合内任意坐标的最近距离,选取最大最近距离对应的坐标添加到采样点集合中;
66、s224:重复步骤s222至s223,直到采样点集合中的采样点数目达到
67、s23:多层次编码层利用多层感知机对每组采样结果进行升维处理,直到每个采样坐标的维数达到128;利用最大池化层提取每组采样结果最高维数的特征图,每个特征图的维数为128,其中d/2分辨率采样下的特征图featured/2为:
68、featured/2=pooling(mle(sampled/2(1))||...||mle(sampled/2(d/2)))
69、其中:
70、||表示多层感知机处理结果的拼接;
71、mle(sampled/2(d/2))表示d/2分辨率采样下第d/2个采样结果的升维处理结果,mle表示多层感知机;
72、pooling(·)表示池化操作,对于d/2分辨率采样下的采样结果,将升维后128×3的升维处理结果mle(sampled/2(1))||...||mle(sampled/2(d/2))池化为128维,得到特征图featured/2;
73、s24:多层次编码层利用多个独立的卷积层对三组采样结果的特征图进行卷积处理,并赋予三组特征图卷积处理结果不同的权重,将赋权后卷积处理结果进行拼接,得到多层次编码特征;在本发明实施例中,d/2分辨率采样下特征图的权重为0.6,d/4分辨率采样下特征图的权重为0.2,d/8分辨率采样下特征图的权重为0.2;
74、s25:解码点云增强层中包含多个不同参数的多层感知机,利用多层感知机对多层次编码特征进行重建以及上采样处理,得到不同分辨率下的缺失点云坐标,并将不同分辨率下的缺失点云坐标同原始点云坐标进行结合,形成补全增强后的三维点云坐标集合,其中缺失点云坐标的颜色值为邻近三维点云坐标的颜色值均值,得到增强后的三维点云数据。
75、可选地,所述s3步骤中确定三维点云数据增强模型的优化目标函数并进行优化训练,包括:
76、确定三维点云数据增强模型的优化目标函数,并基于优化目标函数对三维点云数据增强模型进行优化训练,得到训练后的模型参数,其中待训练模型参数为多层次编码层中多层感知机参数以及卷积层参数θ1,解码点云增强层中多层感知机参数θ2,其中θ1,θ2为参数向量;
77、获取存在缺失点云数据的三维点云数据集合,并获取缺失点云数据的真实三维点云坐标集合,所确定优化目标函数为:
78、
79、其中:
80、ω表示缺失点云数据的真实三维点云坐标集合,num(ω)表示缺失点云数据的数目,num表示三维点云数据增强模型得到的缺失点云数目;
81、locc表示第c个缺失点云数据的真实三维点云坐标;
82、表示三维点云数据增强模型输出的距离locc最近的缺失点云坐标;
83、dis(·)表示距离计算公式;
84、ε表示比例权重,将其设置为0.2;
85、基于优化目标函数,利用adam优化器对三维点云数据增强模型进行训练,得到训练后的模型参数,并基于训练后的模型参数构建得到最优三维点云数据增强模型。
86、可选地,所述s4步骤中利用最优三维点云数据增强模型对坐标转换后的三维点云数据进行增强,包括:
87、将步骤s2中坐标变换后的三维点云数据输入到最优三维点云数据增强模型中,最优三维点云数据增强模型输出增强后的三维点云数据,其中增强后的三维点云数据集合为:
88、{rm|m∈[1,m]}
89、其中:
90、rm表示最优点云增强模型输出的第m个三维点云数据,三维点云数据中包括三维点云坐标以及三维点云颜色值,m表示最优点云增强模型输出的三维点云数据数目。
91、可选地,所述s4步骤中对增强后的三维点云数据结合建筑设计目标三维数据进行相似度计算,并计算得到变换参数,包括:
92、对增强后的三维点云数据结合建筑设计目标三维数据进行相似度计算,并计算得到变换参数,其中相似度计算流程为:
93、s41:利用delaunay三角剖分方法将三维点云数据集合中的三维点云坐标转换为若干delaunay三角网,并利用delaunay三角剖分方法将建筑设计目标三维数据转换为若干delaunay三角网;
94、s42:提取三维点云数据中的三维点云坐标,其中rm中的三维点云坐标为lm;
95、s43:以任意三维点云坐标lm为顶点,得到lm的若干组直接连接点,并以三维点云坐标lm为极点,以lm至任意直接连接点的射线方向为极轴,计算得到极点lm与不同直接连接点所构成射线的极角,得到极点lm对应的极角集合;
96、s44:选取建筑设计目标三维数据中与三维点云坐标lm最接近的三维坐标点l′m,以该三维坐标点l′m为极点,以l′m至任意直接连接点的射线方向为极轴,计算得到极点l′m与不同直接连接点所构成射线的极角,得到极点l′m对应的极角集合;
97、s45:计算极点lm对应的极角集合与极点l′m对应的极角集合的余弦相似度;
98、s46:重复步骤s43至步骤s45,得到三维点云数据中所有三维点云坐标与对应建筑设计目标三维坐标的余弦相似度,将最小的余弦相似度作为相似度计算结果;
99、构建三维点云坐标与建筑设计目标三维坐标的坐标匹配集:
100、{(lm,l′m)|m∈[1,m]}
101、按照步骤s1中旋转矩阵以及平移矩阵的计算流程,计算得到三维点云坐标与建筑设计目标三维坐标之间的旋转矩阵以及平移矩阵,并将计算结果作为变换参数。
102、可选地,所述s5步骤中若相似度计算结果小于指定阈值,则基于变换参数对当前建筑状态的三维点云数据进行校正,包括:
103、若相似度计算结果小于指定阈值,则基于变换参数对当前建筑状态的三维点云数据进行校正,并根据校正结果对当前建筑进行对应的校正处理。
104、为了解决上述问题,本发明提供一种电子设备,所述电子设备包括:
105、存储器,存储至少一个指令;
106、通信接口,实现电子设备通信;及
107、处理器,执行所述存储器中存储的指令以实现上述所述的建筑全过程数字点云校正处理方法。
108、为了解决上述问题,本发明还提供一种计算机可读存储介质,所述计算机可读存储介质中存储有至少一个指令,所述至少一个指令被电子设备中的处理器执行以实现上述所述的建筑全过程数字点云校正处理方法。
109、相对于现有技术,本发明提出一种建筑全过程数字点云校正处理方法,该技术具有以下优势:
110、首先,本方案提出一种三维坐标映射以及相似性度量方法,对所采集的三维点云数据进行坐标变换,其中坐标变换对象为三维点云数据中的三维点云坐标,将三维点云坐标变换到世界坐标系下,其中对于三维点云坐标的坐标系变换公式为:
111、g′(x,y,z)=rg(x,y,z)t+h
112、其中:r表示当前点云坐标系与世界坐标系之间的旋转矩阵,h表示平移矩阵;t表示转置;g′(x,y,z)表示三维点云坐标g(x,y,z)的坐标变换结果;所述旋转矩阵以及平移矩阵的计算流程为:利用相机拍摄得到n个已知世界坐标系下坐标的三维点云坐标:
113、{(pi,qi)|i∈[1,n]}
114、其中:pi表示相机所拍摄得到的第i个三维点云坐标,qi表示pi在世界坐标系下的坐标;对坐标进行标准化处理:
115、
116、
117、其中:分别为pi,qi的标准化处理后结果;将标准化处理后的坐标分别构成矩阵p和矩阵q:
118、
119、
120、计算得到变换矩阵a和b:
121、a=ptq
122、b=pqt
123、分别计算得到变换矩阵a和b的n个特征值和特征向量,并按特征值由大到小顺序对特征向量进行排序,其中变换矩阵a的n个特征向量为:
124、(α1,α2,...,αi,...,αn)
125、其中:αi表示变换矩阵a中第i个特征向量;变换矩阵b的n个特征向量为:
126、(β1,β2,...,βi,...,βn)
127、其中:βi表示变换矩阵b中第i个特征向量;将特征向量分别构成矩阵形式α,β:
128、α=[α1,α2,...,αi,...,αn]
129、β=[β1,β2,...,βi,...,βn]
130、计算得到当前点云坐标系与世界坐标系之间的旋转矩阵r,以及平移矩阵h:
131、r=αβt
132、h=q-rp
133、利用计算得到的旋转矩阵r以及平移矩阵h将三维点云数据中的三维点云坐标变换到世界坐标系下。利用delaunay三角剖分方法将三维点云数据集合中的三维点云坐标转换为若干delaunay三角网,并利用delaunay三角剖分方法将建筑设计目标三维数据转换为若干delaunay三角网;提取三维点云数据中的三维点云坐标,其中rm中的三维点云坐标为lm;以任意三维点云坐标lm为顶点,得到lm的若干组直接连接点,并以三维点云坐标lm为极点,以lm至任意直接连接点的射线方向为极轴,计算得到极点lm与不同直接连接点所构成射线的极角,得到极点lm对应的极角集合;选取建筑设计目标三维数据中与三维点云坐标lm最接近的三维坐标点l′m,以该三维坐标点l′m为极点,以l′m至任意直接连接点的射线方向为极轴,计算得到极点l′m与不同直接连接点所构成射线的极角,得到极点l′m对应的极角集合;计算极点lm对应的极角集合与极点l′m对应的极角集合的余弦相似度;得到三维点云数据中所有三维点云坐标与对应建筑设计目标三维坐标的余弦相似度,将最小的余弦相似度作为相似度计算结果;本方案基于目标建筑当前状态的三维点云数据,建立由相机拍摄像素坐标与世界坐标之间的映射转换关系,进而将三维点云数据由相机坐标系转换到世界坐标系,并采取相同方法得到三维点云数据与建筑设计目标三维数据之间的变换参数,通过结合极坐标系下三维点云坐标的极角以及建筑设计目标三维坐标的极角进行两者的相似度计算,以表征三维数据在方向上的差异性,若相似度计算结果小于指定阈值,则表示当前建筑状态与建筑设计目标存在较大差异,因此基于变换参数对当前建筑状态的三维点云数据进行校正,并根据校正结果对当前建筑进行对应的校正处理,实现建筑全过程数字点云校正处理。
134、同时,本方案提出一种三维点云补全增强方法,通过构建三维点云数据增强模型,所构建三维点云数据增强模型以世界坐标系下的三维点云数据为输入,以增强后的三维点云数据为输出;所构建三维点云数据增强模型包括输入层、多层次编码层以及解码点云增强层,其中输入层用于接收三维点云数据,并对所接收的三维点云数据进行多分辨率下采样处理,多层次编码层用于对不同分辨率的采样结果进行编码处理,形成多层次编码特征,解码点云增强层用于对多层次编码特征进行解码处理,对不同分辨率下的采样结果进行缺失部分补全,得到增强后的三维点云数据。本方案通过在不同分辨率下对点云数据进行采样处理,对不同分辨率的采样结果进行编码处理,形成多层次编码特征,进而对多层次编码特征进行感知以及上采样处理,得到不同分辨率下的缺失点云坐标,将不同分辨率下的缺失点云坐标同原始点云坐标进行结合,形成补全增强后的三维点云坐标集合,实现缺失点云数据的补全增强。
- 还没有人留言评论。精彩留言会获得点赞!