一种面向骨缺损的在线即时修复方法
本发明属于原位打印、在线数据处理、三维重建等,本发明涉及一种面向骨缺损的在线即时修复方法。
背景技术:
1、针对骨缺损,应用生物3d打印技术可在体外制造出的具有生命活性的工程移植支架,可对损伤的骨组织组织进行修复和重建,从而维持或改善骨组织的功能和结构,在临床上具有很好的应用前景。但在骨组织支架与细胞整合研究中,发现存在不良的细胞发育和较差的组织发育,移植物几乎没有能力融入机体组织,最终为机体组织所拒绝,其主要原因是当前工程支架制备技术所建立的细胞环境均为人工微环境,缺乏类似于天然细胞外基质的物质界面,致使细胞诱导不足,组织再生难以实现。
2、随着实时测量和生物制造技术的发展,增材制造技术在生物制造中出现了一个重要分支——原位生物3d打印技术,通过实时重建缺损部位数据,将生物墨水直接在缺损区域进行定制化打印,如此,人体就是一个天然生物反应器,从制造开始阶段就在真实的生物环境中促进打印结构的成熟,消除了在组织发育中起一定作用的人工微环境,此外,内源性细胞可以通过自然诱导迁移到打印结构中,更利于组织的再生。然而,要实现活体原位打印修复,必须先获取修复体的三维模型,即要求在线情况下精确地获取原位缺损数据,并且在既定的手术时间快速地即时完成缺损部位的曲面三维重建。
3、现有的曲面重建与修复均是离线操作,一般采用供专业人员使用的商业软件比如geomagic studio,通过手工重构缺损的孔洞部分,缺少面向特定领域的操作方法、交互步骤复杂,而且重建周期长,慢则1-2天,快则1-2个小时,无法适用于手术过程中的原位打印。为此本发明提出了一种针对骨缺损在线测量进行一体化即时修复的算法,实现从缺损骨组织到完整骨组织三维模型的自动、高效、精准重建。主要内容为:通过便携式三维扫描仪扫描活体或新鲜的缺损骨组织,在线获取其点云数据;通过本发明的一体化算法,对点云数据进行预处理、三角网格化、孔洞检测及曲面修复,最终达到在手术中实现缺损部位的几十秒即时重建,为原位打印提供有效的支持。目前尚未见有基于在线三维扫描技术对缺损骨组织进行即时修复的一体化算法的报道。
技术实现思路
1、针对现有技术存在的技术问题,本发明提供一种面向骨缺损在线测量的一体化即时修复方法,实现在手术中从活体缺损骨组织到完整骨组织三维模型的自动、高效、精准重建。
2、本发明采用如下技术方案予以实施:
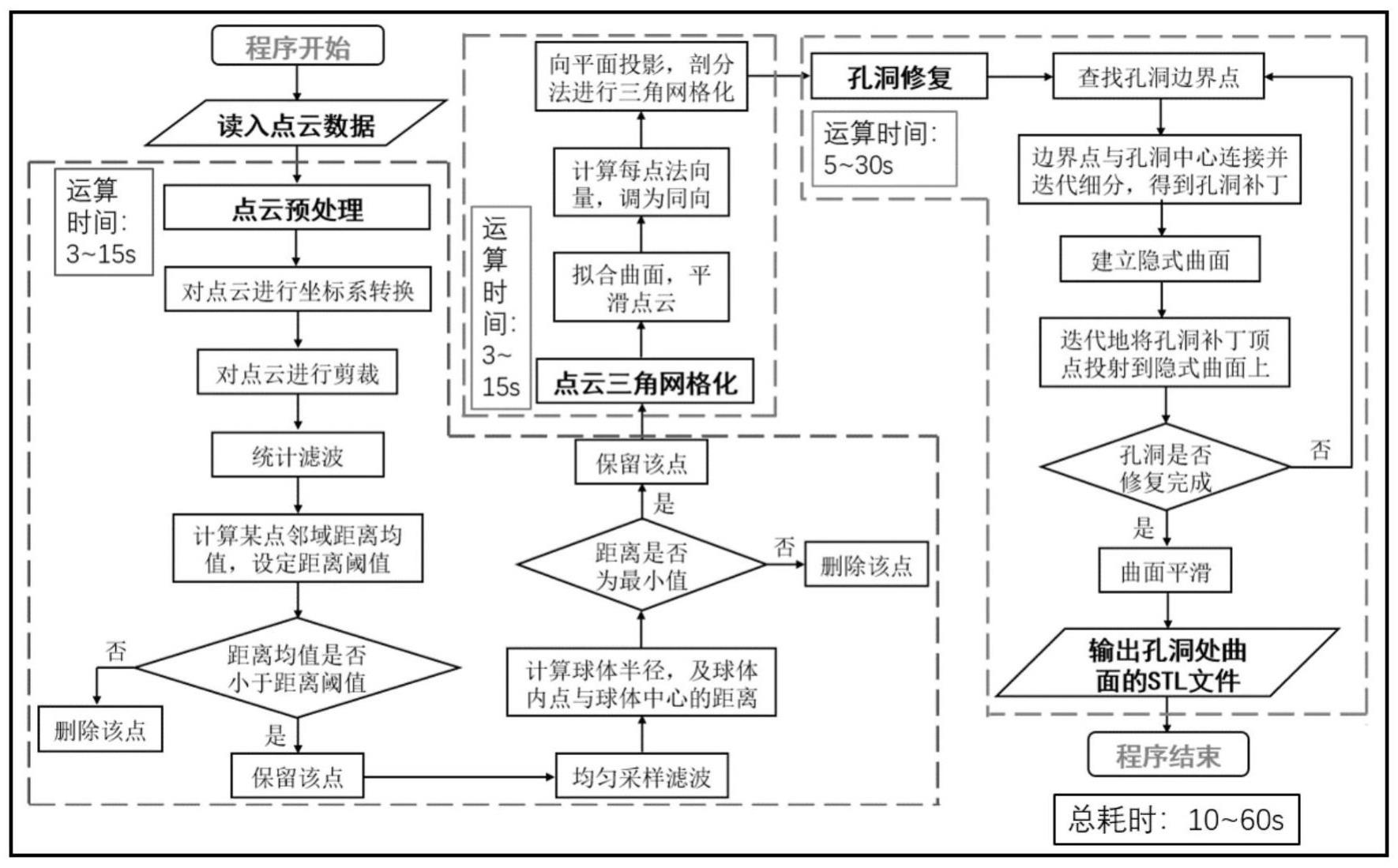
3、一种面向骨缺损的在线即时修复方法,包括如下步骤:
4、s1、在线提取缺损骨组织点云数据进行三维数据的转换处理获得均匀的、仅带有曲面特征的初步缺损骨组织点云数据;
5、s2、根据3d打印模型对初步缺损骨组织点云数据进行三角网格化处理获得带有孔洞的骨组织三角网格曲面模型;
6、s3、根据骨组织三角网格曲面模型进行孔洞修复计算获得孔洞修复曲面的打印模型;其中:
7、301、对骨组织三角网格曲面模型进行索引处理获得孔洞边界点;
8、302、根据骨组织三角网格曲面模型的孔洞中心位置与孔洞边界点连接形成三角网格,连接每一个三角形各边的中点生成四个新的三角形,进行三次细分迭代获得初步修复的孔洞补丁;
9、303、迭代地将初步修复的孔洞补丁顶点投射到如下隐式曲面模型获得符合周围三角网格曲率变化趋势的孔洞修复曲面;
10、
11、其中:(xj,yj,zj)为隐式曲面约束点,λj为约束点的权值,(x,y,z)为曲面上任一点,p0、p1、p2、p3为一阶多项式系数;
12、304、判断孔洞修复是否完成,若完成,则通过拉普拉斯算子迭代地平滑孔洞修复曲面输出孔洞修复曲面的打印模型;否则返回步骤301。
13、进一步,所述步骤s1中在线提取缺损骨组织点云数据进行三维数据的转换处理获得均匀的、仅带有曲面特征的初步缺损骨组织点云数据过程,包括如下步骤:
14、101、对在线提取缺损骨组织点云数据进行点云坐标系转换;
15、102、对坐标系转换的点云数据进行剪裁处理获得孔洞周围仅带有曲率特征的点云数据;
16、103、对孔洞周围仅带有曲率特征的点云数据进行点云统计滤波处理;
17、遍历剪裁后的点云数据,给定与每个点最邻近的点的数量n1,计算每个点与n1个邻近点之间的平均距离;
18、计算所有平均距离的均值与标准差,得到一个距离阈值;删除与n1个邻近点的平均距离大于距离阈值的点;遍历结束,获得去除离群点后的点云数据;
19、104、对去除离群点后的点云数据进行均匀采样滤波处理;
20、遍历去除离群点后的点云,对其创建一系列小的球体,球体半径r1依据点云数据的大小给定;
21、计算每一个球体的中心并球体内的点与球体中心的距离,保留离球心最近的点,删除球体内其它点;最后遍历结束,留下的点即为均匀采样后的点云。
22、进一步,所述步骤s2中根据3d打印模型对初步缺损骨组织点云数据进行三角网格化处理获得带有孔洞的骨组织三角网格曲面模型过程,包括如下步骤:
23、201、通过曲面拟合对均匀采样后的点云进行点云平滑处理;其中:
24、曲面拟合是根据预处理后得到的点云数据建立拟合函数;给定用于拟合的近邻半径r2,计算使得近邻半径内点的取值与拟合函数在该点的取值之间差的加权平方和最小,获得近邻半径内的拟合曲面;将点云映射到拟合曲面上,得到平滑后点云;
25、202、对平滑后点云进行法线计算获得点云法线信息;其中:
26、法线计算处理是遍历平滑后的点云,选取任一点,给定与该点最邻近的点的数量n2,构成三阶矩阵;
27、计算并求解协方差矩阵的特征值,最小特征值对应的特征向量即为法向量,得到点云法线信息;
28、203、根据点云法线信息按照三角网格化处理获得带有孔洞的骨组织三角网格曲面模型;其中:
29、将经过法线计算的点云通过法线投影到某二维坐标平面内;任选三个邻近点连成三角形网格作为初始曲面,点云点之间连接的三角形满足空圆特性和最大化最小角原则,不断搜索邻近点扩张曲面边界,设定搜索半径为r3,直到所有符合几何正确性和拓扑正确性的点都被连上,形成一张完整的三角网格曲面;
30、按照二维平面内点的拓扑连接关系将原始三维空间内的点连接起来获得带有孔洞的骨组织三角网格曲面模型。
31、有益效果:
32、本发明面向骨缺损在线测量提出一体化即时修复方法,可以有效解决现有曲面重建与修复方法中交互步骤繁杂、制作周期长等问题,实现缺损骨修复一步即时成型,适用于手术过程中的原位打印,使术中打印自动化、智能化程度更高。
技术特征:
1.一种面向骨缺损的在线即时修复方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的一种面向骨缺损的在线即时修复方法,其特征在于:所述步骤s1在线提取缺损骨组织点云数据进行三维数据的转换处理获得均匀的、仅带有曲面特征的初步缺损骨组织点云数据过程,包括如下步骤:
3.根据权利要求2所述的一种面向骨缺损的在线即时修复方法,其特征在于:所述步骤s2根据3d打印模型对初步缺损骨组织点云数据进行三角网格化处理获得带有孔洞的骨组织三角网格曲面模型过程,包括如下步骤:
技术总结
一种面向骨缺损的在线即时修复方法,包括如下步骤:S1、在线提取缺损骨组织点云数据进行三维数据的转换处理获得均匀的、仅带有曲面特征的初步缺损骨组织点云数据;S2、根据3D打印模型对初步缺损骨组织点云数据进行三角网格化处理获得带有孔洞的骨组织三角网格曲面模型;S3、根据骨组织三角网格曲面模型进行孔洞修复计算获得孔洞修复曲面的打印模型;本发明实现从活体缺损骨组织到完整骨组织三维模型的自动、高效、精准重建。
技术研发人员:王苗苗,郑淑贤,蔡世堃,姚雅利
受保护的技术使用者:天津大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!