基于多传感器融合的混输泵相含率识别方法
本发明属于多相混输泵相含率识别,具体涉及基于多传感器融合的混输泵相含率识别方法。
背景技术:
1、随着我国经济的快速腾飞,对于能源的需求也不断增加,目前已经成为全球第一大石油和天然气进口国,提高油气资源的开采力度已经迫在眉睫。而为了克服长距离输送管路及立管集输系统的压力损失、减少设备成本、提高输送效率,常采用多相混输系统。多相混输泵作为核心增压部件,常需要在气液两相流动工况下长时间运行,工况的复杂变化对混输泵的稳定性提出了严苛要求。随着入口含气率的增加,混输泵内部流动状况逐渐恶化,直至断流以及随之引起的空化空蚀会严重影响泵的性能以及运行稳定性;而在实际设备运行过程中无法直接判断介质含气率,也就无法判断混输泵内部流态继而对于设备的运行状况做出可靠预警。
2、多相混输泵在工作过程中由于相含率的不同,使得混输泵压力脉动特性与振动特性存在差异,这种差异外在表现为信号的差异,因此可以通过分析信号来进行混输泵状态的识别。近年来,随着机器学习理论的发展,支持向量机、bp神经网络等传统的浅层机器学习方法越来越多的使用在故障识别等问题中。而随着工程问题的复杂性不断提高,浅层机器学习理论难以精确快速的对多相混输泵相含率进行识别。
技术实现思路
1、本发明的目的是提供基于多传感器融合的混输泵相含率识别方法,解决了现有技术难以精确快速识别深海油气开采利用及运输过程中混输泵相含率的问题。
2、本发明所采用的技术方案是,基于多传感器融合的混输泵相含率识别方法,具体按照以下步骤实施:
3、步骤1,采集不同含气率工况下混输泵的主轴振动信号x(t)、导叶区域内进口的压力脉动信号v(t)及导叶区域内出口的压力脉动信号s(t);
4、步骤2,对步骤1获得的混输泵主轴振动时间序列信号x(t)、导叶区域内进口的压力脉动时间序列信号v(t)、导叶区域内出口的压力脉动时间序列信号s(t)分别进行多重分形去趋势分析,再分别提取多重分形特征参数并构建特征向量;
5、步骤3,将步骤2得到的特征向量作为样本集,将样本集进行归一化处理,将归一化处理后的样本集划分为训练集、测试集、验证集;
6、步骤4,搭建lstm模型;
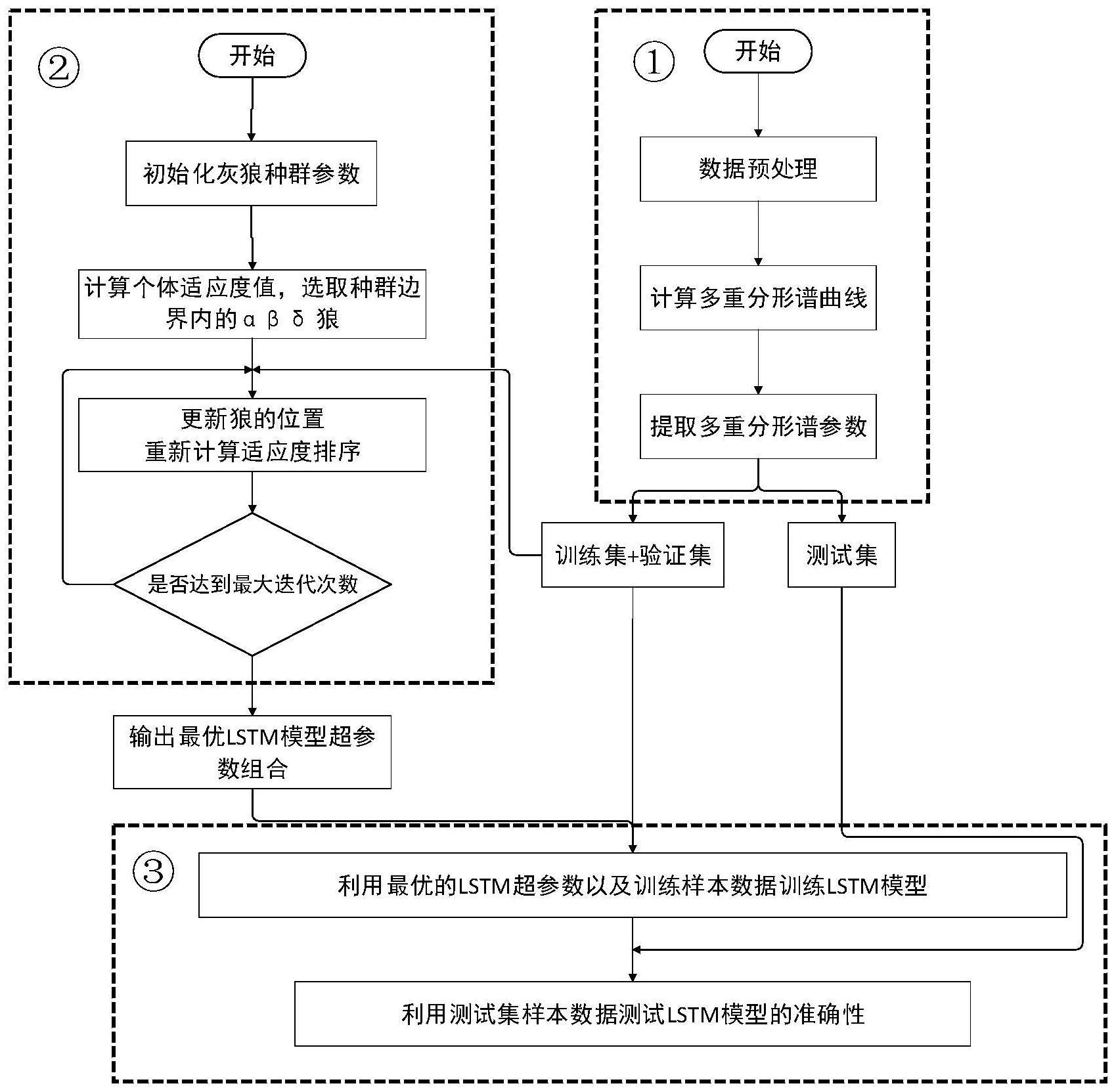
7、步骤5,利用灰狼优化算法优化lstm模型超参数,得到lstm模型的最优超参数值;
8、步骤6,采用训练集、验证集及步骤5中得到的最优超参数重新训练lstm模型,得到训练好的lstm模型;
9、步骤7,将测试集输入到步骤6得到的训练好的lstm模型中,测试模型的准确性,得到识别结果。
10、本发明的特点还在于,
11、步骤1的具体过程为:固定总流量,不断改变多相混输泵实验系统中的气相、液相流量以调整系统含气率,并在不同的含气率工况下利用激光测振仪采集主轴振动信号x(t),利用动态压力传感器分别采集导叶区域内进口的压力脉动信号v(t)及导叶区域内出口的压力脉动信号s(t),通过数据采集卡将采集的信号发送到计算机,获得混输泵主轴振动时间序列信号x(t)、导叶区域内进口的压力脉动时间序列信号v(t)、导叶区域内出口的压力脉动时间序列信号s(t)。
12、用于采集导叶区域内进口的压力脉动信号v(t)的动态压力传感器设置于距离导叶区域进口处b/6,用于采集导叶区域内出口的压力脉动信号s(t)的动态压力传感器设置于距离导叶区域出口处b/6,b为导叶区域宽度。
13、步骤2的具体过程为:
14、步骤2.1,对步骤1获得的混输泵主轴振动时间序列信号x(t)去均值,构造离差序列y(i),表达式为:
15、
16、式(1)中,y(i)为离差序列;μ为时间序列信号的平均值;i=1,2,3,…n,n为信号序列的长度;
17、步骤2.2,将离差序列y(i)从正反两个方向划分为互不重叠的ns段,每段长度为尺度s,以最小二乘法拟合k阶多项式,得到每个区间的均方误差f2(s,m),表达式为:
18、
19、式(2)中,ym(i)是指第m段数据的趋势
20、步骤2.3,根据步骤2.2得到的每个区间的均方误差f2(s,m),计算q阶波动函数的平均值fq(s),表达式为:
21、
22、式(3)中,q为矩阶数,即分形阶数;
23、步骤2.4,在双对数坐标系中绘制fq(s)与s曲线,通过fq(s)与s曲线得到hurst指数hq和质量指数τ(q),表达式为:
24、
25、步骤2.5,通过legendre变换计算奇异指数α与分形维度f(α),表达式为:
26、
27、步骤2.6,重复步骤2.3~步骤2.5,得到每段求和序列的的奇异指数α与分形维度f(α),提取多重分形曲线极值所对应的奇异指数值α0、最小奇异指数αmin、最大奇异指数αmax、最小奇异指数αmin所对应的概率子集的分形维数f(αmin)、最大奇异指数αmax所对应的概率子集的分形维数f(αmax),多重分形值δf、多重分形谱宽度δα、非对称指数r,则:
28、δα=αmax-αmin (6)
29、
30、δf=f(αmax)-f(αmin) (8)
31、其中,导叶区域内进口的压力脉动时间序列信号v(t)、导叶区域内出口的压力脉动时间序列信号s(t)的处理过程与混输泵主轴振动时间序列信号x(t)一致;
32、步骤2.7,将步骤2.6得到的混输泵主轴振动时间序列信号对应的多重分形特征参数按照奇异指数值α0、最小奇异指数αmin、最大奇异指数αmax、δα为多重分形谱宽度、最小奇异指数αmin所对应的概率子集的分形维数f(αmin)、最大奇异指数αmax所对应的概率子集的分形维数f(αmax)、多重分形值δf、非对称指数r依次拼接,同理,分别将步骤2.6得到的导叶区域内进口的压力脉动时间序列信号、导叶区域内出口的压力脉动时间序列信号对应的多重分形特征参数依次进行拼接;再按照混输泵主轴振动时间序列信号对应的拼接参数、导叶区域内进口的压力脉动时间序列信号对应的拼接参数、导叶区域内出口的压力脉动时间序列信号对应的拼接参数的顺序将三个拼接后的参数进行拼接,得到一个24维特征向量。
33、步骤4中,lstm模型包括输入层、lstm层、dropout层、全连接层、softmax层以及输出层。
34、步骤5的具体过程为:
35、步骤5.1,定义三折交叉验证意义下的分类准确率与1的差值为适应度函数;
36、步骤5.2,初始化灰狼种群数量、超参数搜索范围、迭代次数、系数a、随机向量c,使用训练集和验证集对lstm模型进行训练;
37、步骤5.3,通过适应度函数计算灰狼种群每个个体的适应度值,对所有个体的适应度值进行排序,则适应度值最小的三个个体选定为α、β、δ狼,其中,α<β<δ;
38、步骤5.4,根据步骤5.3选定的α、β、δ狼的位置更新种群中所有狼的位置,按照步骤5.3方法重新计算每个个体的适应度并排序更新α、β、δ狼;
39、骤5.5,判断是否达到最大迭代次数,最大迭代次数设置为100次,若是,则输出最优超参数值,若否,则返回步骤5.4继续操作。
40、步骤5.4中,更新种群中所有狼的位置的具体过程为:
41、根据α、β、δ三个最优解的位置来更新自身位置;
42、
43、
44、a=2ar-a (11)
45、
46、式(9)-(12)中,a为收敛因子,随着迭代次数从2线性减小到0,r为[0,1]间的随机数;dα、dβ、dδ分别表示α、β和δ狼与其他个体间的距离;xα、xβ、xδ分别表示α、β和δ狼当前位置向量;c1、c2、c3是随机向量;x1、x2、x3分别是当前灰狼向α、β和δ狼移动的向量;x表示当前个体的位置;a1、a2、a3表示系数。
47、本发明的有益效果是:
48、(1)本发明基于多传感器融合的混输泵相含率识别方法,通过采集混输泵主轴振动信号和导叶区域的压力脉动信号,提取信号的多重分形谱曲线特征参数,进行特征融合;避免了单传感器无法完整反映系统状态特征变化的缺点,可以大大提高识别结果的准确性;
49、(2)本发明基于多传感器融合的混输泵相含率识别方法,采用多重分形去趋势方法(mfdfa)对信号进行特征参数提取,可以较为完整的反映系统的内在动力学特征,相较于传统的线性分析方法提高了识别结果的可靠性与准确率;
50、(3)本发明基于多传感器融合的混输泵相含率识别方法,通过灰狼算法优化lstm模型超参数,对构建的lstm模型进行训练,减小了人为干预误差。所采用的深度学习算法(lstm)相较于传统的机器学习算法而言,识别性能更好,可以有效解决混输泵实际运行过程中的相含率识别问题,为混输泵的安全稳定运行提供保障,有效地弥补了此领域的空白,为后续方法的发展提供了有益借鉴。
- 还没有人留言评论。精彩留言会获得点赞!