面向深海集矿车的多车作业调度方法、系统、设备及介质
本发明涉及,尤其涉及一种面向深海集矿车的多车作业调度方法、系统、设备及介质。
背景技术:
1、众所周知约占地球总面积71%的海洋蕴藏着极其丰富的海洋资源,其开发、利用前景十分广阔。多金属结核,又称锰结核,是大洋底部广泛分布的铁锰氧化矿石。它广泛分布于水深4000~6000米的深海底,它含有铜、钻、镍、锰、铁、钨、钦、铝、金、银、铂等70多种元素,其中镍、钻、铜、锰的平均品位分别为:镍1.3%,钻0.22%,铜1%,锰25%,其总量分别高出陆上相应储量的几十倍到千倍,具有很高的经济价值。
2、海底异常丰富的矿产资源己成为世界各国瞩目的21世纪具有商业开发前景的战略资源。深海资源开采技术及装备已成为各先进工业国家的重要研究对象。而深海集矿车作为重要的海洋装备之一,一直都受到世界各国学者的积极关注,集矿车加管道输送采矿系统是当前深海矿物开采较为成熟的方案,该系统由集矿车、输送软管、中间矿仓、扬矿管及采矿船等组成。集矿车在海底采集结核,采集的结核在集矿机内清洗脱泥和破碎后,经软管输送到连接于刚性扬矿管下端的中间矿仓,然后结核经扬矿管扬送到海面的采矿船上。各国的海试验证了这种采矿系统的技术可行性,人们普遍认为自行式集矿车与管道提升相结合的结核开采系统将成为21世纪最有前途的第一代深海商业采矿系统。
3、但随着世界各国对海洋探索和开发活动越来越深入,需求日益复杂化和多样化,仅仅通过单体深海集矿车作业某些指标的优化已经远远不能满足需求。发明人认为需立足长远,将目光转向多深海集矿车协同作业的研究,因为通过多深海集矿车的协同工作,能够更方便、更快捷、更高效地完成复杂系统任务。
4、发明发现,深海集矿车多车作业调度,可实现多车共用一个中间矿仓和采矿船,以减少采矿船等辅助设备的使用成本,提高深海采矿系统的作业效率。然而受制于集矿车自身结构的特殊性,多集矿车作业调度过程中需克服由于脐带缆和扬矿管干扰而产生的安全布放、作业和回收的问题。
5、正因为集矿车之间的脐带缆和扬矿管容易发生干涉,导致一般的多水下机器人作业调度算法在深海集矿车的多车调度系统上并不能取得良好的应用效果。因为目前大多数的多水下机器人调度算法都是基于多auv协同作业环境下进行开发和研究,auv采用无线通信,电池供电,并没有考虑多水下机器人之间的脐带缆、扬矿管等干涉问题。
6、综上,目前存在的深海集矿车调度方法,由于存在脐带缆和扬矿管的布局限制,主要以单车调度为主。单车调度作业会很大程度降低开采作业效率,若开采区域数量多、面积大、集中性低,单车调度作业的作业效率将会面临低下的问题。同时,由于一艘辅助开采船只能协助一辆集矿车进行作业开采,深海开采的作业成本将因此提高。
技术实现思路
1、本发明提供了一种面向深海集矿车的多车作业调度方法、系统、设备及介质,以解决现有深海集矿车调度方法中,由于存在脐带缆和扬矿管的布局限制,以单车调度为主,无法实现多车作业调度,导致开采作业效率低的问题。
2、第一方面,提供了一种面向深海集矿车的多车作业调度方法,包括:
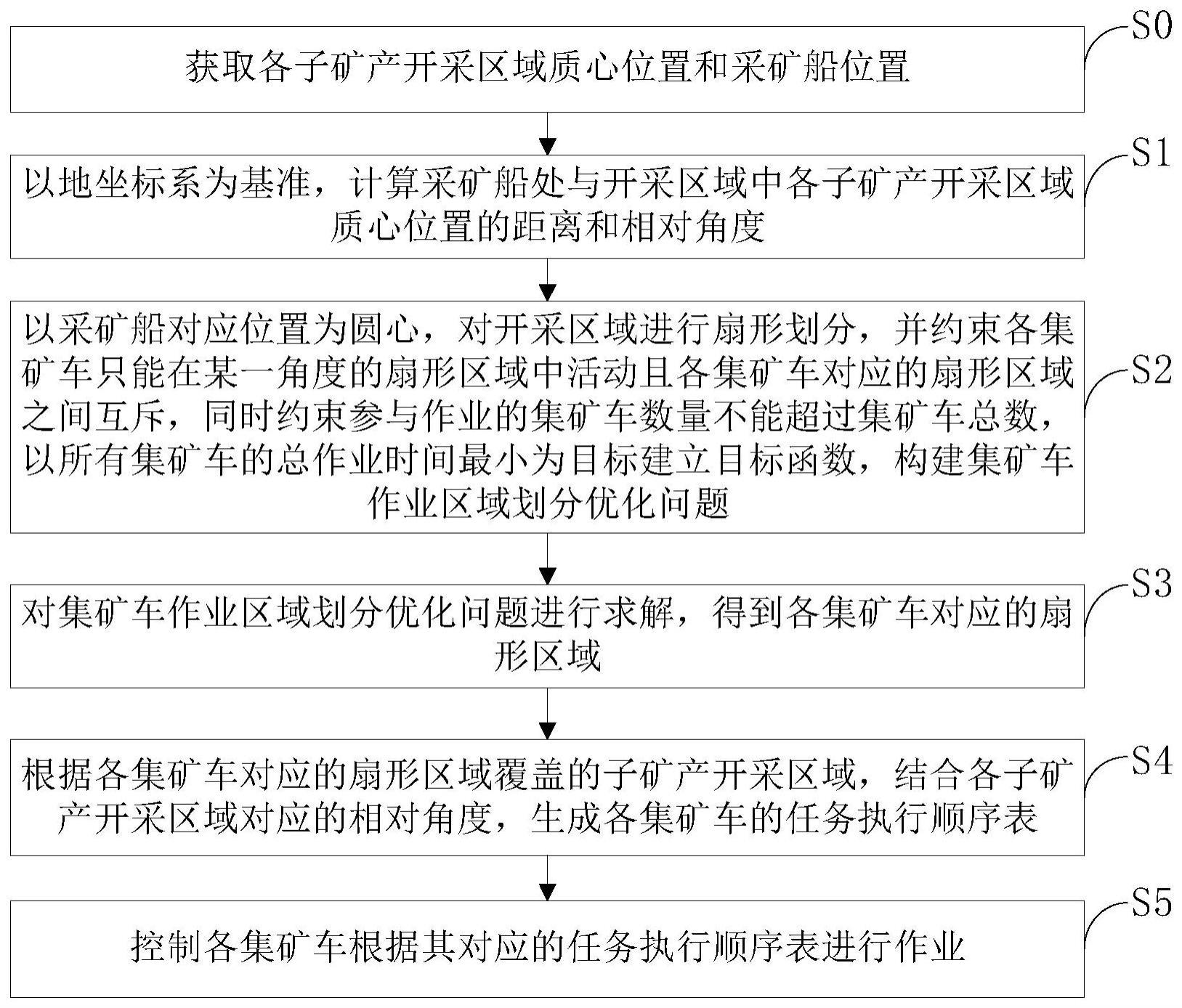
3、s1:以地坐标系为基准,计算采矿船处与开采区域中各子矿产开采区域质心位置的距离和相对角度;
4、s2:以采矿船对应位置为圆心,对开采区域进行扇形划分,并约束各集矿车只能在某一角度的扇形区域中活动且各集矿车对应的扇形区域之间互斥,以所有集矿车的总作业时间最小为目标建立目标函数,构建集矿车作业区域划分优化问题;
5、s3:对集矿车作业区域划分优化问题进行求解,得到各集矿车对应的扇形区域;
6、s4:根据各集矿车对应的扇形区域覆盖的子矿产开采区域,结合各子矿产开采区域对应的相对角度,生成各集矿车的任务执行顺序表;
7、s5:控制各集矿车根据其对应的任务执行顺序表进行作业。
8、根据第一方面,在一种可能的实现方式中,所述步骤s1中,各子矿产开采区域采用多边形选定,各子矿产开采区域质心位置通过如下方法得到:
9、假设某一子矿产开采区域对应的多边形的边数为n,将该子矿产开采区域划分为n-2个三角形;
10、求取各三角形质心坐标和面积;
11、根据如下公式计算该子矿产开采区域质心的坐标(x,y):
12、
13、
14、其中,x、y分别表示该子矿产开采区域质心的横坐标和纵坐标;x1,x2,…,xn-2分别表示n-2个三角形质心的横坐标;y1,y2,…,yn-2分别表示n-2个三角形质心的纵坐标;s1,s2,…,sn-2分别表示n-2个三角形的面积。
15、根据第一方面,在一种可能的实现方式中,所述步骤s1中,所述采矿船处的坐标通过如下方法得到:
16、a1:获取各子矿产开采区域质心位置;
17、a2:设置适应度函数;
18、a3:采用离散粒子群算法求解得到与各子矿产开采区域质心位置距离之和最小的位置;
19、a4:输出求解的结果,得到采矿船处的坐标。
20、根据第一方面,在一种可能的实现方式中,所述适应度函数如下式所示:
21、
22、式中,fitness表示适应度,x和y分别表示待求解位置的横坐标和纵坐标;xi和yi分别表示第a个子矿产开采区域质心的横坐标和纵坐标,n为子矿产开采区域的数量。
23、根据第一方面,在一种可能的实现方式中,所述步骤a3包括:
24、a31:设置离散粒子群算法参数,并初始化所有粒子的位置和速度;根据适应度函数计算所有粒子适应度,并以适应度最佳的粒子作为全局最佳个体,将当前这批粒子暂时作为最佳群体;
25、a32:在正交方向上更新各个粒子的速度,再以各个粒子的速度更新其位置,并约束调整更新后越界的粒子,重新计算每个粒子的适应度;
26、a33:在更新后的粒子群中,若有粒子的适应度优于全局最佳个体,则更新全局最佳个体;若更新后的粒子群中存在第i个粒子的适应度优于最佳群体中的第i个粒子的适应度,则更新最佳群体中第i个粒子;
27、a34:重复上述步骤a32和a33,直到满足终止条件,输出最终的全局最佳个体的位置。
28、根据第一方面,在一种可能的实现方式中,所述步骤s2中,目标函数表示如下:
29、
30、其中,z表示所有集矿车的总作业时间,表示第j辆集矿车从采矿船处行驶至划分到的扇形区域内的开采作业起始位置的时间,表示第j辆集矿车在划分到的扇形区域内的开采作业时间,表示第j辆集矿车从开采作业完成时的位置行驶至采矿船处的时间,m表示参与作业的集矿车数量。
31、根据第一方面,在一种可能的实现方式中,所述步骤s3中,采用模拟退火算法、穷举搜索方法、局部搜索方法、蚁群算法中的一种进行求解。
32、第二方面,提供了一种面向深海集矿车的多车作业调度系统,包括:
33、距离及角度获取模块,用于以地坐标系为基准,计算采矿船处与开采区域中各子矿产开采区域质心位置的距离和相对角度;
34、区域划分优化问题构建模块,用于以采矿船对应位置为圆心,对开采区域进行扇形划分,并约束各集矿车只能在某一角度的扇形区域中活动且各集矿车对应的扇形区域之间互斥,以所有集矿车的总作业时间最小为目标建立目标函数,构建集矿车作业区域划分优化问题;
35、求解模块,用于对集矿车作业区域划分优化问题进行求解,得到各集矿车对应的扇形区域;
36、任务执行规划模块,用于根据各集矿车对应的扇形区域覆盖的子矿产开采区域,结合各子矿产开采区域对应的相对角度,生成各集矿车的任务执行顺序表;
37、调度模块,用于控制各集矿车根据其对应的任务执行顺序表进行作业。
38、第三方面,提供了一种计算设备,包括:
39、存储器,其上存储有计算机程序;
40、处理器,用于加载并执行所述计算机程序以实现如上所述的面向深海集矿车的多车作业调度方法的步骤。
41、第四方面,提供了一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现如上所述的面向深海集矿车的多车作业调度方法的步骤。
42、本发明提出了一种面向深海集矿车的多车作业调度方法、系统、设备及介质,通过以采矿船对应位置为圆心,对开采区域进行扇形划分,不同的集矿车限定在对应的扇形区域内活动,进而以所有集矿车的总作业时间最小为目标构建集矿车作业区域划分优化问题,进行求解得到最优划分方式,从而可以生成各集矿车的任务执行顺序表并据此进行作业。通过扇形划分的方式将各集矿车活动范围限定在了特定区域,并限定了任务执行顺序,有效避免了多集矿车作业时脐带缆和扬矿管相互之间干扰的问题,在保证作业安全的前提下,提高了整体的开采作业效率。
- 还没有人留言评论。精彩留言会获得点赞!