计算机实现的方法、方法、计算机程序产品与流程
本发明涉及计算机实现的用于确定机器的安全系统的安全配置的至少一个参数的方法。此外,本发明涉及用于设置机器的安全系统的方法。此外,本发明涉及计算机程序产品。
背景技术:
1、在机器和设施的设计、生产和操作中,这些机器和设施的安全性是必要的。例如,在欧洲,该要求是由机械指令(ce)规范性地定义的,该指令规定对机器的整个使用寿命进行的定期风险评估。
2、对于ce认证,必须根据en iso 12100标准执行机器的危险分析。en iso 12100标准定义了基本的术语和方法,并且建立了用于风险评估和风险降低的一般指导原则,以帮助设计者生产安全的机器。
3、分析的重要方面是评估对人类构成潜在危险的机械危险位置或威胁位置。机械危险位置是例如边缘或尖部,特别是锋利的边缘或尖部。
4、必须对机器的这种机械危险位置进行确定和确保安全。可以采取各种技术保护措施来确保机械危险位置安全。特别地,可以提供安全系统来确保机器上的某些危险位置安全。例如,安全系统可以包括传感器、摄像装置、边缘保护器或屏障,借助于它们可以确保危险位置安全。
5、到目前为止,ce认证都是由检查员手动执行的。特别地,到目前为止,检查员针对机械危险位置根据自己的判断手动分析了测试样品。
技术实现思路
1、在该背景下,问题是提供一种通过其可以改进机器的安全性的方法。特别地,问题是提供一种借助其可以改进对机器的危险位置的检测和确保安全的方法。
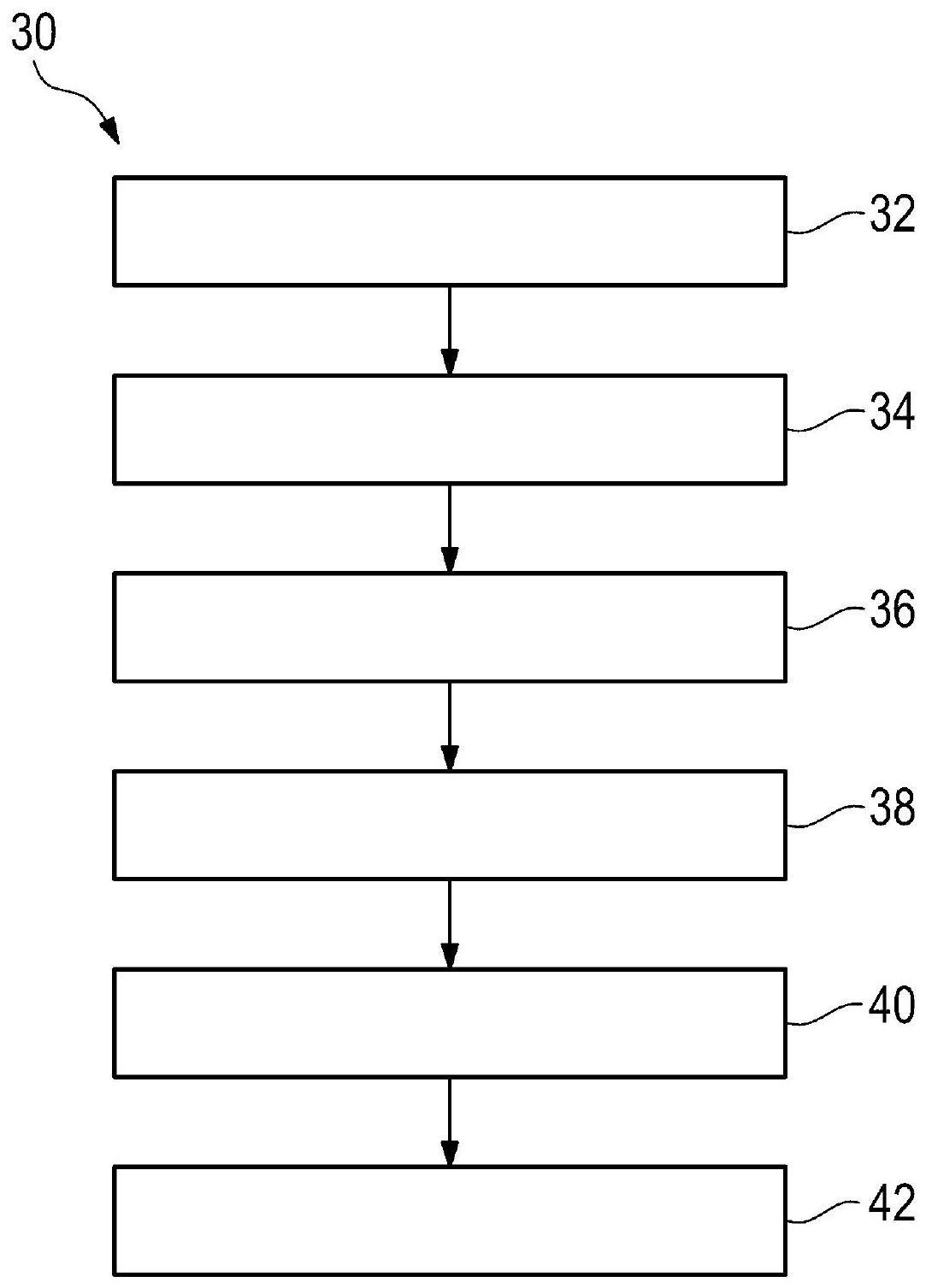
2、根据本发明的第一方面,该问题通过一种计算机实现的用于确定机器的安全系统的安全配置的至少一个参数的方法来解决,该方法包括以下步骤:
3、-在虚拟环境中提供机器的虚拟模型;
4、-在虚拟环境中模拟来自机器的虚拟模型的一个或更多个粒子的散射,其中,在模拟期间获取粒子的模拟数据;
5、-基于模拟数据确定粒子的旋转变化,其中,每个旋转变化与在旋转变化的时间处对应粒子的位置相关联;
6、-根据一个或更多个过滤标准过滤所确定的旋转变化,其中,根据过滤标准中的第一过滤标准,对大于或等于限定阈值的旋转变化执行过滤;
7、-基于与经过滤的旋转变化相关联的位置,确定机械危险位置;
8、-基于所确定的机械危险位置,确定安全配置的至少一个参数。
9、根据本发明的第二方面,提供了用于设置机器的安全系统的方法,该方法包括以下步骤:
10、-使用根据本发明的第一方面所述的方法来确定机器的安全系统的安全配置的至少一个参数;以及
11、-基于安全配置设置安全系统。
12、根据本发明的第三方面,提供一种包括计算机程序的计算机程序产品,该计算机程序包括当计算机程序在计算机上执行时用于执行根据本发明的第一方面所述的方法的程序代码装置。此外,还可以提供一种包括指令的计算机程序产品,当程序由计算机执行时,所述指令使计算机执行根据本发明的第一方面所述的方法的步骤。
13、有利的是,新方法使用处理单元或控制设备来实现,该处理单元或控制设备可以是通用计算机或专用计算机,其中,存储和执行适当的计算机程序或计算机程序产品,其中,根据前面提到的方法,计算机程序或计算机程序产品被设计和配置用于确定机器的安全系统的安全配置的至少一个参数或者用于设置机器的安全系统。
14、虚拟环境包括计算机生成的三维空间,这也可以被称为虚拟空间。借助于虚拟环境,可以对物体进行建模、制作纹理和绘制动画。例如,虚拟环境可以使用适当的软件程序(具体是图形引擎)在计算机上生成。例如,对于模拟,可以使用软件blender。
15、在虚拟环境中,提供或生成机器的虚拟模型。虚拟模型是机器的3d模型。特别地,虚拟模型可以是设计模型或cad(计算机辅助设计)模型。机器的虚拟模型具体是基于机器的3d数据,借助于机器的3d数据可以生成虚拟模型,并且因此可以在虚拟环境中提供虚拟模型。
16、在虚拟环境中,可以模拟物体的运动。在根据提出的方法进行的模拟中,模拟了虚拟环境中一个或更多个粒子的运动。优选地,粒子具有膨胀性。例如,粒子可以是球形的。优选地,粒子还具有质量。例如,质量可以均匀地分布在粒子的体积上或均匀地分布在粒子的表面上。粒子的表面可以包括表面粗糙度,这也可以被称为粘性。优选地,模拟中的所有粒子具有相同的物理性质,具体是质量、尺寸、形状和表面粗糙度。特别地,可以使用相同的粒子。
17、优选地,机器的虚拟模型在虚拟环境中是静止的。可替选地,机器的虚拟模型可以具有远大于粒子质量的质量。
18、对于模拟,粒子在虚拟环境中生成。对于粒子的移动,虚拟环境可以包括力场,具体是重力场。例如,力场的原点具体是重力中心可以位于虚拟模型的中心或质量中心。可替选地,力场还可以是源自球壳的排斥力场,在该球壳的中心内布置虚拟模型。可替选地或附加地,粒子可以已经在虚拟环境中以限定速度或限定动量生成,其中,在生成时的速度矢量优选地指向机器的虚拟模型的方向。
19、粒子可以在机器的虚拟模型的表面上散射。在散射期间,粒子与机器的虚拟模型发生碰撞,并因此偏转。因此,粒子与虚拟模型的碰撞优选地是无弹性的。特别地,虚拟环境中的粒子和虚拟模型可以被模拟成刚体。粒子与虚拟模型碰撞的位置可以被称为散射位置。
20、通常,当粒子与物体碰撞时,粒子的动量和角动量可能变化。特别地,在碰撞期间,碰撞粒子的运动方向和旋转可能变化。粒子的旋转也可以被称为固有角动量或转动。通常,本体的旋转是围绕本体的质量中心的转动运动或转动。因此,当粒子从虚拟模型散射时,运动的方向以及具体地粒子的旋转可能变化。
21、在模拟期间,获取粒子的模拟数据。优选地,至少获取在多个时间处的每个粒子的位置和旋转作为模拟数据。优选地,模拟数据是以规则时间间隔(特别是在模拟的持续时间内)获取的。因此,多个时间可以在相等时间间隔相互跟随。因此,每个时间间隔对应于模拟步骤。换言之,模拟数据在模拟的持续时间内以特定时间间隔即针对每个模拟步骤定期获取。因此,模拟数据包括针对每个时间(具体是针对每个模拟步骤)的每个粒子的位置和旋转。
22、然后分析获取的模拟数据。特别地,确定粒子的旋转在模拟期间是否变化。旋转方面的变化被称为旋转变化。特别地,分析模拟数据以确定粒子的旋转变化。为此,在两个获取的、连续时间(第一时间和第二时间)的每个时间处考虑粒子的旋转。优选地,如果在第一时间处的旋转与在第二时间处的旋转之间的差不等于零,则存在旋转变化。特别地,在第一时间处的旋转与在第二时间处的旋转之间的差的绝对值可以作为旋转变化的量度。
23、每个旋转变化可以与在旋转变化的时间处对应粒子的位置相关联。例如,在旋转变化的时间处的位置可以是在第一时间处的位置、在第二时间处的位置、或在这两个时间处的两个位置的平均。
24、如上所述,粒子的旋转的变化总是作为粒子的碰撞的结果而发生。特别地,当粒子与机器的虚拟模型碰撞时,即通过机器的虚拟模型而散射时,粒子的旋转变化。然后,在旋转变化的时间处的粒子的位置是粒子的散射位置。
25、然后过滤所确定的旋转变化。对过滤应用一个或更多个过滤标准。换言之,过滤意味着搜索满足过滤标准的特定旋转变化。通过过滤,丢弃那些不满足所应用的过滤标准的旋转变化。因此,经过滤的旋转变化被称为满足所应用的过滤标准的那些旋转变化。
26、一个或更多个过滤标准至少包括第一过滤标准。根据第一过滤标准,对大于或等于限定阈值的旋转变化执行过滤。换言之,根据第一过滤标准,应用了阈值方法。
27、当粒子在机械危险位置例如机器的边缘或尖部处散射时,存在至少会发生大的或更大的旋转变化的增加的可能性。边缘或尖部越锋利或越尖锐,可能性就进一步增大。因此,对于在机械危险位置处的散射,旋转变化通常比对于在相对平坦或仅轻微弯曲的表面处的散射大。特别地,对于在锋利的边缘或尖部处的散射,旋转变化通常比对于在相对平坦或轻微弯曲的表面处的散射大得多。
28、通过根据阈值的过滤,过滤掉小的旋转变化,即丢弃小的旋转变化。这可以丢弃不是由在机械危险位置处的散射引起的旋转变化。阈值的水平指示过滤的灵敏度。阈值越高,机器的边缘或尖部必然越锋利或越尖锐,以造成在散射时粒子的对应旋转变化。换言之,基于阈值的过滤因此使得能够对发生在机械危险位置处的旋转变化进行过滤。
29、然后,基于与经过滤的旋转变化相关联的位置,可以确定机器的机械危险位置。机械危险位置可以优选地是机器的表面的边缘或尖端,其中,这些边缘或尖端的位置基于与经过滤的旋转变化相关联的位置确定。特别地,机械危险位置是机器的表面的锋利的或尖锐的、即与安全有关的边缘或尖端。通过根据第一过滤标准的过滤,经过滤的旋转变化通常由在机械危险位置处的散射引起。然后,与旋转变化相关联的位置位于各个机械危险位置。
30、基于所确定的机械危险位置,然后可以确定机器的安全系统的安全配置的至少一个参数。
31、安全系统可以包括用于确保机器的机械危险位置安全的各种保护设备。例如,可以提供物理保护设备例如边缘保护器、屏障、标记等或传感设备例如传感器、光格栅、摄像装置等作为保护设备。借助于物理保护设备,可以通过物理保护设备的适当布置阻碍或防止接近机械危险位置来确保机械危险位置安全。借助于传感保护设备,可以通过传感保护设备监视在机械危险位置周围的区域即安全区域来确保机械危险位置安全。例如,该区域可以由距机械危险点的安全距离来限定。传感保护设备可以连接至安全系统的控制设备。如果检测到人进入监视区域或在监视区域内,可以采取适当的保护措施。例如,安全系统的保护设备或控制设备可以被配置成在检测到人进入监视区域或存在于监视区域内的情况下发出视觉或听觉警报信号或者关闭机器。
32、因此,安全系统的安全配置限定了安全系统的一个或更多个保护设备的布置和/或配置。安全配置由一个或更多个参数限定。因此,安全配置的参数确定一个或更多个保护设备的布置和/或配置。换言之,安全配置的参数因此确定用于确保机械危险位置安全的保护措施。
33、根据所确定的安全系统的安全配置,然后可以相应地设置安全系统,以确保机器的所确定的机械危险位置安全。因此,实施保护措施以防止或阻碍人可能在所确定的机械危险位置处受伤。
34、如果所有确定的旋转变化都小于阈值,则通过第一过滤标准的过滤将丢弃所有确定的旋转变化。在这种情况下,确定不存在机械危险位置。因此,不需要保护措施。
35、如果在模拟中没有旋转变化发生,也就是说,如果粒子的旋转在模拟期间没有变化,也同样适用。在这种情况下,也不需要保护措施。
36、因此,新提出的方法提供了用于确定机械危险位置的方法。该方法也可以称作粒子旋转方法。借助于粒子旋转方法,可以自动检测机械危险位置,例如锋利的边缘或尖部。借助于粒子旋转方法,因此可以自动执行ce认证。另外,可以仅基于机器的设计数据例如cad数据执行对机械危险位置的分析。与人工ce认证进行比较,提出的方法提供以下优点:可以快速、可靠并且具体是在开发处理(例如,基于cad设计模型)的早期执行确定。
37、此外,在提出的方法中,基于所确定的危险位置来确定适当的保护或确保安全措施。因此,在提出的方法中,基于所确定的危险位置来确定安全系统的安全配置的至少一个参数。然后,安全系统可以根据所确定的安全配置来设置,以确保机器安全。以这种方式,提高了机器的安全性。特别地,新提出的方法改进了对机器的危险位置的检测和确保安全。
38、因此,上面提出的问题得到全面解决。
39、在第一改进中,粒子的数目可以大于1000,优选地大于10,000或30,000,特别是大于100,000。
40、特别地,粒子的数目可以在10,000与30,000之间。优选地,在模拟的开始处,粒子随机地或任意地分布在虚拟模型周围的虚拟空间中。以这种方式,以相对较短的模拟时间获得了对机器的虚拟模型的本体的更好扫描。较低数目的粒子可以用较长的模拟时间来补偿,以获得即使只有几个点的高扫描。
41、在另一改进中,粒子可以包括1mm至1000mm的粒子尺寸,优选地5mm至600mm的粒子尺寸,特别是50mm的粒子尺寸。
42、粒子尺寸限定粒子的直径(具体是最大膨胀)。较小的粒子尺寸实现对机器的虚拟模型的本体的较精细的扫描。但是,过小的粒子尺寸可能会造成扫描机器的虚拟模型的本体的人类无法接近的区域。因此,粒子尺寸优选地设置成与人体的维度例如手臂、手或手指的维度相对应。例如,粒子尺寸可以是50cm至100cm(大致对应于平均手臂长度)或10cm至30cm(大致对应于平均手长度)或5cm至10cm(大致对应于手指长度)或1cm至2cm(大致对应于手指厚度)。以这种方式,可以模拟人是否可以到达某区域,即某区域对人来说是否可以接近。通过选择合适的粒子尺寸,可以确保仅检测到那些人类可以接近的机械危险位置。
43、在另一改进中,为了模拟散射,一定数目的粒子可以同时在机器的虚拟模型处散射,特别地,其中,在散射的模拟期间,粒子可以相互碰撞。
44、通常,为了模拟散射,粒子可以单独散射,即一个接一个且相互独立,也可以同时在模型上散射。在同时散射的情况下,粒子在模拟散射期间可以相互碰撞。碰撞意味着粒子可以相互碰撞,并且因此改变其运动的方向。这使得能够到达机器的虚拟模型的本体的在没有粒子之间的碰撞的情况下难以或不可能到达的区域。以这种方式,进一步改进了对机器的虚拟模型的本体的扫描。
45、在另一改进中,为了模拟散射,粒子尤其是一定数目的粒子可以从球体向内发射(具体是从球体内部),其中,球体被布置在虚拟环境中,使得它包围机器的虚拟模型。
46、优选地,该球体是闭合表面,具体是球形表面,并且用作其中生成用于模拟的粒子的区域。因此,这个球体可以被称为发射球体。由球体发射粒子的发射位置可以随机分布或者基本上均匀地分布在球体上。虚拟模型优选地位于发射球体的中心处。在发射球体上生成后,粒子可以具有速度,即初始动量。该速度的方向可以是向内的(具体是沿球体的法线方向)。优选地,粒子在没有初始旋转的情况下发射。通过从这样的球体发射,实现了对机器的虚拟模型的本体的相对均匀的扫描。
47、此外,在虚拟环境中,即在虚拟空间中,还可以布置另一球体,该球体可以被称为反射球体。反射球体也包围虚拟模型,其中,虚拟模型优选地被布置在中心。反射球体至少与发射球体一样大或大于发射球体。反射球体在虚拟环境中是静止的。来自内部的与反射球体碰撞的粒子被反射回内部。以这种方式,在模拟期间,粒子被保持在虚拟环境中的限定的空间体积内。以这种方式,在模拟期间,粒子与机器的虚拟模型的本体的碰撞的频率增加。因此,也改进了对机器的虚拟模型的本体的扫描。
48、在另一改进中,在根据过滤标准中的第二过滤标准进行过滤的步骤中,可以对其在虚拟环境中的相关联位置在虚拟模型处或虚拟模型附近的旋转变化执行过滤。
49、优选地,根据第二过滤标准的过滤在根据第一过滤标准的过滤之前执行。可替选地,根据第一过滤标准的过滤可以在根据第二过滤标准的过滤之前执行。在另一替选方案中,根据第一过滤标准和第二过滤标准的过滤也可以同时执行。因此,“在虚拟模型处或虚拟模型附近”限定了虚拟模型周围的特定区域,其中,在根据第二过滤标准的过滤中,过滤掉了其相关联位置不在虚拟模型周围的特定区域内的旋转变化。例如,该特定区域可以由到虚拟模型的质量中心或中心的特定距离来限定,其中,特定距离至少与虚拟模型的直径或最大膨胀一样大。借助于特定距离,由此限定了球体,虚拟模型被布置在该球体中,并且该球体优选地位于发射球体内并小于发射球体。可替选地,特定区域还可以由到虚拟模型的表面的特定距离来限定。因此,通过根据第二过滤标准的过滤,丢弃了不是由粒子与机器的虚拟模型的本体的碰撞引起的旋转变化。换言之,因此也过滤掉了粒子与其他物体的碰撞,例如粒子彼此之间的碰撞或粒子与外部反射球体的碰撞。
50、在另一改进中,在确定旋转变化的步骤中,可以基于所确定的旋转变化和与之相关联的位置生成旋转图,其中,在过滤的步骤中过滤旋转图,其中,在确定机器的机械危险位置的步骤中,基于经过滤的旋转图确定机械危险位置。
51、旋转图表示在相关联的位置处的旋转变化。例如,位置可以通过笛卡尔坐标系的坐标x、y、z描述。因此,旋转图是所确定的旋转变化s(x,y,z)与对应的位置的关联。换言之,旋转图包含所有确定的旋转变化。在过滤步骤中,旋转图被过滤。这通过丢弃来自旋转图的不满足所应用的过滤标准的那些旋转变化来完成。因此,经过滤的旋转图仅包含满足所应用的过滤标准的那些旋转变化。经过滤的旋转图还可以被称为稀疏的旋转图。因此,经过滤的旋转图仅包含大旋转变化发生的位置,尤其是在机器的区域内的位置,该区域可以归因于机械危险位置。
52、在另一改进中,安全配置的至少一个参数可以是安全系统的保护设备的布置和/或配置和/或在所确定的机械危险位置周围的安全区域的布置和/或距所确定的机械危险位置的安全距离。
53、优选地,保护设备的布置限定保护设备的位置、取向、形状和/或尺寸。作为保护设备,可以使用上面已经说明过的物理保护设备和传感保护设备。保护设备的配置限定了如何设置保护设备以保护对应的危险位置。例如,传感保护设备可以被配置成监视由安全距离或安全区域限定的区域。安全区域或安全距离限定人不应该或不可以进入或到达的区域。因此,该区域是一个待监视或待确保安全的区域。监视或确保安全可以借助于安全系统的对应保护设备来完成。然后,借助于参数限定的安全配置用于相应地配置安全系统。换言之,安全配置用于根据安全配置来设置保护设备。因此,保护设备的布置和/或配置以及安全区域和/或安全距离的确定用于确保所确定的机械危险位置安全。
54、在另一改进中,在设置安全系统时,可以基于安全配置来布置和/或配置安全系统的保护设备。
55、借此,保护设备被布置和配置成使得保护设备可以确保机器的至少一个对应的危险位置安全或监视机器的至少一个对应的危险位置。例如,传感保护设备可以被配置成使得传感保护设备监视在危险位置周围的待监视的区域。物理保护设备可以被配置和布置成使得物理保护设备确保危险位置安全,即阻碍或防止人接近危险位置。以这种方式,相应地实现了机器的确保安全。
56、在另一改进中,在设置安全系统时,可以基于安全配置设置安全区域或安全距离,其中,借助于安全系统的保护设备监视或保护安全区域或安全距离。
57、例如,可以提供传感保护设备,该传感保护设备被配置成监视安全区域或安全距离。此外,还可以提供物理保护设备,该物理保护设备被配置成确保安全区域或安全距离安全。特别地,安全配置还可以针对多个危险位置限定多个安全区域或安全距离,其中,设置任一个或更多个传感保护设备(即相应地进行布置和配置)以监视安全区域和/或距机械危险位置的安全距离。以这种方式,相应地实现了机器的确保安全。
58、应当理解,在不脱离本发明的范围的情况下,上面的特征以及在下文中将说明的特征不仅可以以每种情况下指示的组合使用,还可以以其他组合使用或单独使用。
- 还没有人留言评论。精彩留言会获得点赞!