一种视觉里程计动态特征点检测与抑制方法与流程
本发明涉及自动驾驶领域,尤其涉及一种视觉里程计动态特征点检测与抑制方法。
背景技术:
1、视觉里程计(visual odometry,vo)是通过单个相机或多个相机作为输入估计自身运动的过程,应用领域涵盖自动驾驶、机器人、无人机、增强现实(augmented reality,ar)等。vo概念由nister在2004年路标论文中创造。这个名词和车轮测距(odometry)非常类似,增量式地通过对车轮转过的圈数积分估计车辆的运动。同样的,视觉里程计利用板载相机检测图像运动变化来增强式地估计载体位姿。为了使视觉里程计更加有效,必须有足够的环境图像,具有足够纹理的静态图像可以提取运动特征。另外,需要捕捉连续的图像使场景重叠。
2、相比车辆车轮测距,视觉里程计的优势是不受车轮在不平整地面或其他不良状况下滑动的影响。由于现代机器人、汽车等载体上一般均配备了摄像头传感器,因此视觉里程计并不会大幅增强额外成本开销。此外,视觉里程计还提供了更加精确的轨迹估计,相对位置误差范围为0.1%到2%。这使得视觉里程计成为车轮测距有益补充,还有其他导航系统,比如全球卫星导航系统(global positioning system,gps)、惯性测量单位(inertiameasurement unit,imu)以及雷达测距系统。在gps失效的环境下,比如城市高楼、隧道或水下、太空中,视觉里程计则显得非常重要。
3、视觉里程计的主要方式分为特征点法和直接方法。其中,特征点方法目前占据主流,能够在噪声较大、相机运动较快时工作,但地图则是稀疏特征点;直接方法不需要提取特征,能够建立稠密地图,但存在着计算量大、鲁棒性不好的缺陷。此外,在纹理丰富、位姿估计也会带来较大误差,严重时甚至会导致视觉里程计系统发散、无法正常工作。例如,中国专利cn 109813334 a公开了一种基于双目视觉的实时高精度车辆里程计算方法,在其方案中通过采用直接获取的相邻帧图像进行特征提取和匹配,其方案中很容易收到动态车辆等物体的影响,从而容易导致视觉里程计的输出精度受到较大影响。
技术实现思路
1、本发明的目的在于提供一种视觉里程计动态特征点检测与抑制方法。
2、为实现上述发明目的,本发明提供一种视觉里程计动态特征点检测与抑制方法,包括:
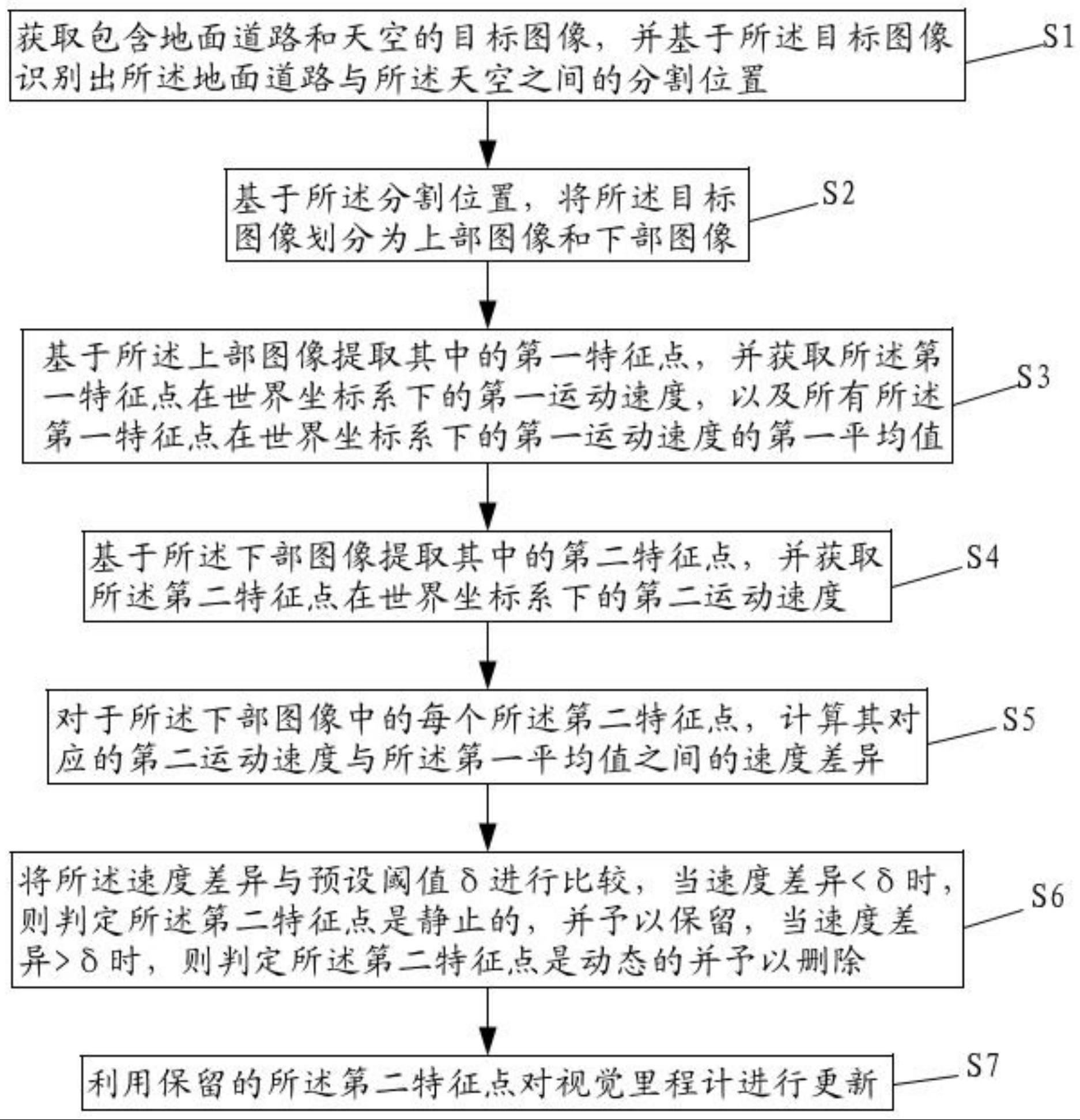
3、s1.获取包含地面道路和天空的目标图像,并基于所述目标图像识别出所述地面道路与所述天空之间的分割位置;
4、s2.基于所述分割位置,将所述目标图像划分为上部图像和下部图像;
5、s3.基于所述上部图像提取其中的第一特征点,并获取所述第一特征点在世界坐标系下的第一运动速度,以及所有所述第一特征点在世界坐标系下的第一运动速度的第一平均值
6、s4.基于所述下部图像提取其中的第二特征点,并获取所述第二特征点在世界坐标系下的第二运动速度vi;
7、s5.对于所述下部图像中的每个所述第二特征点,计算其对应的第二运动速度vi与所述第一平均值之间的速度差异δvi;
8、s6.将所述速度差异δvi与预设阈值δ进行比较,当δvi<δ时,则判定所述第二特征点是静止的,并予以保留,当δvi>δ时,则判定所述第二特征点是动态的并予以删除;
9、s7.利用保留的所述第二特征点对视觉里程计进行更新。
10、根据本发明的一个方面,步骤s1中,基于所述目标图像识别所述地面道路与所述天空之间的分割位置的步骤中,包括:
11、s11将所述目标图像转换为灰度图像;
12、s12.采用边缘检测算子,对所述目标图像中的路面车道特征进行检测和识别;其中,所述路面车道特征为车道线;
13、s13.基于所述车道线远端的特征点获取所述地面道路与所述天空之间的分割位置。
14、根据本发明的一个方面,步骤s12中,采用边缘检测算子,对所述目标图像中的路面车道特征进行检测和识别的步骤中,至少获取两条具有间隔的所述车道线。
15、根据本发明的一个方面,步骤s13中,基于所述车道线远端的特征点获取所述地面道路与所述天空之间的分割位置的步骤中,包括:
16、以获得的所述车道线中的一条作为基准车道线,并沿近端至远端的方向,基于所述基准车道线获取两个所述车道线在近端间隔距离最大的第一车道线特征点对,以及获取两个所述车道线在远端间隔距离最小的第二车道线特征点对;
17、计算所述第一车道线特征点对与所述第二车道线特征点对之间的平行度误差;其中,若所述平行度误差小于预设阈值,则基于所述第二车道线特征点对的连线获取对所述目标图像的分割位置。
18、根据本发明的一个方面,计算所述第一车道线特征点对与所述第二车道线特征点对之间的平行度误差的步骤中,若所述平行度误差大于预设阈值,则以所述第二车道线特征点对中更靠远端的车道线特征点获取所述分割位置。
19、根据本发明的一个方面,步骤s2中,基于所述分割位置,将所述目标图像划分为上部图像和下部图像的步骤中,基于所述分割位置在所述目标图像上生成分割线,以所述分割线为边界划分出所述部图像和下部图像。
20、根据本发明的一个方面,所述分割线为水平分割线。
21、根据本发明的一个方面,步骤s5中,所述速度差异δvi表示为:
22、根据本发明的一种方案,本发明充分挖掘并利用了在城市车载视觉里程计应用中,“动态干扰特征点大多来自于地面道路而非城市天空”这一客观实际规律,将城市天空作为“背景板”,仅通过算法,即可实现对图像动态特征点的有效检测和良好抑制,极为有效地提高了车载视觉里程计的精度和可靠性。
23、根据本发明的一种方案,本发明无需增加激光雷达、毫米波雷达等外部传感器或设备,就能实现对城市道路动态特征点的检测和识别,易于实用,实现成本低。
技术特征:
1.一种视觉里程计动态特征点检测与抑制方法,其特征在于,包括:
2.根据权利要求1所述的视觉里程计动态特征点检测与抑制方法,其特征在于,步骤s1中,基于所述目标图像识别所述地面道路与所述天空之间的分割位置的步骤中,包括:
3.根据权利要求2所述的视觉里程计动态特征点检测与抑制方法,其特征在于,步骤s12中,采用边缘检测算子,对所述目标图像中的路面车道特征进行检测和识别的步骤中,至少获取两条具有间隔的所述车道线。
4.根据权利要求3所述的视觉里程计动态特征点检测与抑制方法,其特征在于,步骤s13中,基于所述车道线远端的特征点获取所述地面道路与所述天空之间的分割位置的步骤中,包括:
5.根据权利要求4所述的视觉里程计动态特征点检测与抑制方法,其特征在于,计算所述第一车道线特征点对与所述第二车道线特征点对之间的平行度误差的步骤中,若所述平行度误差大于预设阈值,则以所述第二车道线特征点对中更靠远端的车道线特征点获取所述分割位置。
6.根据权利要求5所述的视觉里程计动态特征点检测与抑制方法,其特征在于,步骤s2中,基于所述分割位置,将所述目标图像划分为上部图像和下部图像的步骤中,基于所述分割位置在所述目标图像上生成分割线,以所述分割线为边界划分出所述部图像和下部图像。
7.根据权利要求6所述的视觉里程计动态特征点检测与抑制方法,其特征在于,所述分割线为水平分割线。
8.根据权利要求7所述的视觉里程计动态特征点检测与抑制方法,其特征在于,步骤s5中,所述速度差异δvi表示为:
技术总结
本发明涉及一种视觉里程计动态特征点检测与抑制方法,包括:获取包含地面道路和天空的目标图像,并识别出地面道路与天空之间的分割位置;基于分割位置将目标图像划分为上部图像和下部图像;基于上部图像提取第一特征点,获取第一特征点在世界坐标系下的第一运动速度,以及所有第一特征点的第一运动速度的第一平均值;基于下部图像的第二特征点,并获取第二特征点在世界坐标系下的第二运动速度;对于下部图像中的每个所述第二特征点,计算其对应的第二运动速度与第一平均值之间的速度差异Δvi;将速度差异Δvi与预设阈值δ比较,若Δvi<δ,判定第二特征点是静止的,予以保留;利用保留的第二特征点对视觉里程计进行更新。
技术研发人员:王云飞
受保护的技术使用者:北京眸星科技有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!