一种基于对称方向场的三维翼面四边形网格自动生成方法
本发明涉及计算机辅助工程几何前处理,具体涉及一种基于对称方向场的三维翼面四边形网格自动生成方法。
背景技术:
1、面向飞行器机翼气动外形设计的几何前处理技术,是一个涉及到计算机图形学和计算流体力学等多学科领域的典型多学科交叉问题。针对飞行器机翼气动外形设计,高效实现计算机辅助设计(computer aided design,cad)模型到离散化网格模型的转换,是后续开展计算流体力学(computer fluid dynamics,cfd)偏微分方程组高效解算,以得到翼面气动特性的重要一环。
2、目前飞行器机翼气动外形设计的一大主流范式为:首先针对截面翼型进行气动设计,接着通过参数化拉伸获得三维翼型。在传统的计算机辅助工程(computer aidedengineering,cae)流程中,针对该三维翼型的几何前处理需要借助网格划分软件来手动划分网格,整个几何前处理流程占整个cae计算任务全部人力时间的60%-80%,而其中网格划分又可以占到几何前处理流程耗时的80%。由于需要大量人工干预,因而自动化程度较低是当前cae领域的一大技术瓶颈。
技术实现思路
1、本技术实施例针对上述情况,提出了一种基基于对称方向场的三维翼面四边形网格自动生成方法,以克服或部分克服现有技术的不足之处。本方法通过三维翼型的截面形状参数和空间几何参数生成b样条曲线模型,根据b样条曲线模型采样点离散化生成三角网格,并提取三角网格中的前缘、后缘和翼尖曲线特征,接着通过优化曲线特征约束下的方向场和参数化,提取四边形网格,实现从二维截面翼型到三维翼面再到高质量四边形网格的自动生成。
2、为了实现上述目的,本技术公开了一种基于对称方向场的三维翼面四边形网格自动生成方法,所述方法包括如下步骤:
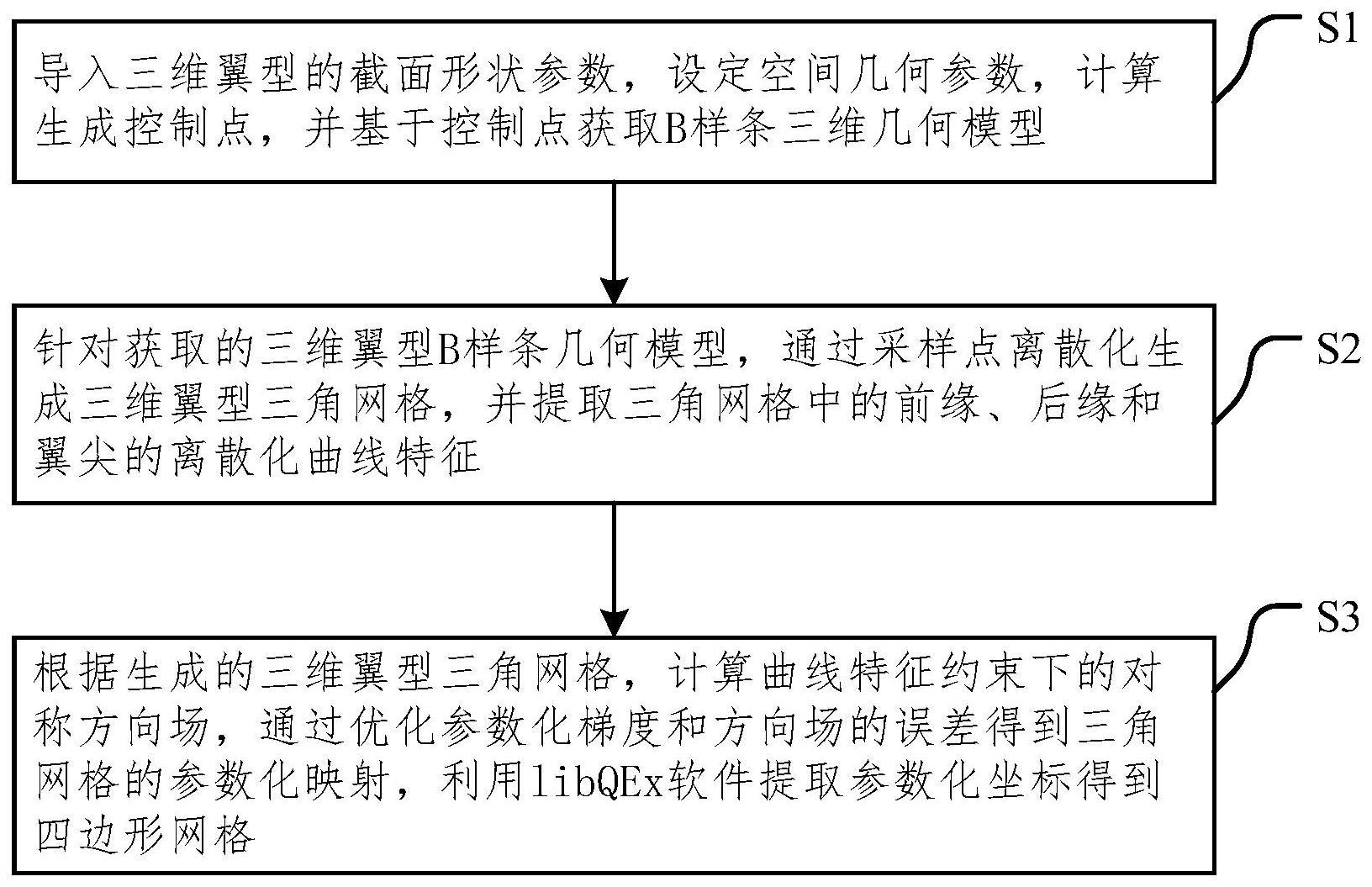
3、步骤s1:导入三维翼型的截面形状参数,设定空间几何参数,计算生成控制点,并基于控制点获取b样条三维几何模型;
4、步骤s2:针对获取的三维翼型b样条几何模型,通过采样点离散化生成三维翼型三角网格,并提取所述三角网格中的前缘、后缘和翼尖的离散化曲线特征;
5、步骤s3:根据生成的三维翼型三角网格,计算曲线特征约束下的对称方向场,通过优化参数化梯度和方向场的误差得到三角网格的参数化映射,利用libqex软件提取参数化坐标得到四边形网格。
6、可选地,所述步骤s1中,设定空间几何参数具体包括:设定包括翼根弦长、翼尖弦长、前缘后掠角、半翼展和后缘厚度在内的空间集合参数。
7、可选地,所述步骤s1中,基于控制点获取b样条三维几何模型的算法流程包括:
8、步骤s1-1:导入naca翼型描述格式的三维翼型截面形状参数文本文件,根据后缘厚度设置截面翼型上沿和下沿中的后缘点,接着对上下沿靠近后缘点线性插值,使得前缘到后缘钝面之间平滑过渡,生成具有后缘钝面的截面翼型;
9、步骤s1-2:将三维翼型截面分为上下沿两部分,将其包含的翼型二维点作为控制点分别生成3阶b样条上沿曲线和下沿曲线;
10、步骤s1-3:分别对上沿曲线和下沿曲线进行等数目均匀采样,使得上下沿采样点一一对应;
11、步骤s1-4:根据翼根弦长、翼尖弦长、前缘后掠角和半翼展,计算翼尖相对翼根偏移;使用上一步骤s1-3中的二维上下沿采样点创建三维翼型翼根上沿控制点、翼根下沿控制点、翼尖上沿控制点和翼尖下沿控制点,其中上下沿、翼根与翼尖的控制点具有一一对应关系;组合上沿控制点为上翼面控制点,组合下沿控制点为下翼面控制点,选择所有控制点中位于后缘钝面的四个点组成后缘钝面控制点;
12、步骤s1-5:创建节点向量,设置上下翼面b样条曲面u方向为机翼弦长方向,v方向为翼展方向,阶数为3×1,创建上翼面和下翼面b样条曲面;设置后缘钝面b样条曲面u方向为机翼厚度方向,v方向为翼展方向,阶数为1×1,创建后缘钝面b样条曲面;
13、步骤s1-6:根据上下翼面控制点计算平均水平方向向量和竖直方向向量,进而计算上下翼尖面控制点;
14、步骤s1-7:设置上下翼尖面b样条曲面u方向为机翼弦长方向,v方向为机翼厚度方向,阶数为3×3,创建上下翼尖面b样条曲面。
15、可选地,所述步骤s2中,针对获取的三维翼型b样条几何模型,通过采样点离散化生成三维翼型三角网格,并提取所述三角网格中的前缘、后缘和翼尖的离散化曲线特征,其具体步骤包括:
16、步骤s2-1:设置三角网格目标边长度;
17、步骤s2-2:根据三角网格目标边长度计算累计长度函数和边缘累计面积函数,分别根据计算所得的累计长度函数和边缘累计面积函数在表面边界曲线上和曲面内部生成均匀采样点;
18、步骤s2-3:根据生成的采样点,利用delaunay剖分获得三维翼型三角网格,并提取前缘、后缘和翼尖的离散化曲线特征。
19、可选地,所述步骤s2-2中,根据三角网格目标边长度计算累计长度函数和边缘累计面积函数,分别根据计算所得的累计长度函数和边缘累计面积函数在表面边界曲线上和曲面内部生成均匀采样点具体包括:
20、步骤s2-21:对步骤s1生成的每个b样条曲面边界曲线,计算累计长度函数并据此估算样本点个数;使用等差累计长度对应的u为节点向量;根据节点向量对曲线进行采样得到边界采样点,并生成采样点的曲面参数坐标;筛选其中位于前缘曲线、后缘钝面边界曲线和翼尖上下沿曲线上的采样点为边界特征采样点;
21、步骤s2-22:对步骤s1生成的每个b样条曲面,计算边缘累计面积函数并据此估算样本点个数;使用等差边缘累计面积对应的u为节点向量ku,使用等差边缘累计面积对应的v为节点向量kv;使用ku×kv在每个b样条曲面采样;根据b样条节点参数,创建采样点的曲面参数坐标,得到曲面内部特征采样点;
22、步骤s2-23:合并所述边界特征采样点和曲面内部特征采样点,得到所有特征采样点的集合。
23、可选地,步骤s2-3中,根据生成的采样点,利用delaunay剖分获得三维翼型三角网格,并提取前缘、后缘和翼尖的离散化曲线特征,具体包括:
24、步骤s2-31:根据上翼面、下翼面、上翼尖面、下翼尖面和后缘钝面上采样点的曲面参数坐标计算delaunay剖分,得到二维三角网格的连接关系,使用所述连接关系和对应的采样点三维坐标,生成三角网格;
25、步骤s2-32:提取所述三角网格中的边并筛选其中两个端点均属于特征采样点的边为特征边。
26、可选地,所述步骤s3中,根据生成的三维翼型三角网格,计算曲线特征约束下的对称方向场,通过优化参数化梯度和方向场的误差得到三角网格的参数化映射,利用libqex软件提取参数化坐标得到四边形网格,具体包括:
27、步骤s3-1:生成方向场约束;定义对称方向场为面片平面具有旋转对称性的四个三维向量,记其表征向量为v∈r3;筛选所有面片中只有一条边为特征边的面片为约束面片,设置约束向量为单位边向量;
28、步骤s3-2:求解全局对称方向场;定义方向场光滑能量函数为相邻面片方向场表征向量在同一局部坐标系下的差值平方和,并通过混合整数优化求解在步骤s3-1面片约束下的全局优化问题,得到全局最优方向场,计算奇点指数并筛选指数不为4的整倍数的顶点为奇点;
29、步骤s3-3:切割三角网格;计算三角网格对偶图的最小生成树,追踪对偶图中的非树边,标记其中的所有环路中包含的边;对所有奇点,计算其到标记边的最短路径并将路径上的边也进行标记;沿标记边对三角网格进行切割,得到切割后的三角网格;
30、步骤s3-4:设置曲面特征参数化约束:在步骤s3-1得到的约束面片上,若方向场与特征边平行,则约束特征边两端点沿u方向对齐,否则约束其沿v方向对齐;
31、步骤s3-5:求解方向场指导下的参数化问题;对步骤s3-3切割边两侧的对应顶点参数化坐标生成无缝化约束,对奇点生成奇点参数化整数坐标约束;设置四边形目标长度参数,定义参数化能量函数为三角面片上参数化梯度和方向场差值的平方和,通过混合整数优化求解在曲面特征参数化约束、无缝化约束和奇点整数约束下的参数化能量函数最小化问题,得到最优顶点参数化坐标;
32、步骤s3-6:将三角形顶点空间坐标和纹理坐标以obj文件格式存储;使用libqex软件读取存储的obj格式文件,最终提取得到四边形网格。
33、本方法通过三维翼型的截面形状参数和空间几何参数生成b样条曲线模型,根据b样条曲线模型采样点离散化生成三角网格,并提取三角网格中的前缘、后缘和翼尖曲线特征,接着通过优化曲线特征约束下的方向场和参数化,提取四边形网格,实现从二维截面翼型到三维翼面再到高质量四边形网格的自动生成,由于本方法通过对三维翼型的几何生成、网格剖分进行自动化改进,大大减少了气动外形设计中的人工干预,起到了加速机翼气动外形设计流程的作用。
- 还没有人留言评论。精彩留言会获得点赞!