颞下颌关节运动模拟仿真方法
本发明属于关节运动模拟,特别是一种颞下颌关节运动模拟仿真方法。
背景技术:
1、颞下颌关节是人体解剖与功能较复杂的关节之一,比体内任何其他关节承受更多的循环加载和卸载。颞下颌关节疾病(tmd)远非罕见,仅1990年的早期数据显示,tmd在一般人群中的患病率就约为12%,2008年进行的一项研究显示高达10%的女性患者患有tmd。创伤、肿瘤、感染、先天畸形、骨关节病等原因均可致颞下颌关节的解剖结构严重破坏,全颞下颌关节置换术是其治疗方案之一。
2、人工颞下颌关节与正常关节的解剖结构相似,主要由关节窝、关节突两部分组成,在通过运动行使功能的过程中,两组件间会发生摩擦,导致关节假体磨损。磨损粒子的产生,是关节假体失去长期稳定性的主要原因之一,而磨损研究试验离不开关节运动模拟。
3、公开号为cn106875432a,公开了一种颞下颌关节运动重建方法及系统,通过采集拍摄者开闭口下颌运动的标记点轨迹的图像序列,确定每帧图像中口内固定标记装置上所有标记点三维坐标,获取标记点在空间中的运动轨迹,收集口内固定标记装置的cbct影像以及拍摄者的cbct影像,将口内固定标记装置的cbct影像的标记点与摄像机拍摄获取的标记点进行配准,获取标记点运动的变换矩阵,利用变换矩阵对拍摄者的cbct影像进行刚体变换,获得拍摄者的cbct影像序列,继而获得颞下颌的运动影像。
4、公开号为cn112700703a,公开了一种颞下颌关节体外仿真模拟器,具体包括仿真头颅模型、头颅固位装置、三维空间调节装置、控制装置和传动装置。利用控制装置生成控制信号,通过传动装置将动力传导至三维空间调节装置,利用三维空间调节装置调整位置,从而实现仿真头颅模型中上、下颌骨以髁突为轴心完成双侧联动的模拟开闭口运动,可以充分模拟颞下颌关节的功能运动,通过调节关节运动频率模拟生理及多种病理状态的关节运动。
5、公开号为cn109064862a,公开了一种颞下颌关节模拟演示装置的使用方法,颞下颌关节模拟演示装置包括底座、立柱、颧骨模拟架、下颌模拟架、上牙模、下牙模和驱动杆。根据教学需求制备上牙模和下牙模,使立臂的端头伸入凹陷部并被气囊环绕;调整第一柱销的位置,将驱动杆套接在第一柱销和第二柱销上,从而使上牙模和下牙模贴合;调整立臂的端头的位置,通过滑动第一柱销,即可演示颞下颌关节的运动关系。
6、然而,由于颞下颌关节运动相对复杂,目前有关颞下颌关节运动模拟的研究还较少,尚未成熟与完善。因此,为探索更适宜的人工颞下颌关节材料组合、延长全颞下颌关节置换术的术后使用时间,寻求一种基于多项式插值的颞下颌关节运动模拟仿真方法是十分迫切且必要的。
技术实现思路
1、本发明针对上述现有技术中的缺陷,提出一种颞下颌关节运动模拟仿真方法。该方法包括采集表征颞下颌关节运动相关的关键特征点的真实三维运动数据,构建颞下颌关节运动数据集,进行数据归一化和预处理;针对预处理的颞下颌关节运动数据集,借助b样条曲线进行b样条曲线拟合,获取颞下颌关节运动扩充数据集;基于颞下颌关节运动扩充数据集,借助串联机器人,构建串联机器人下颞下颌关节的运动学模型;构建运动学模型的空间位置过渡模型,获得更新后的颞下颌关节的运动学模型,赋予串联机器人各关节处的驱动电机,即可完成颞下颌关节模拟运动仿真。本发明从颞下颌关节的真实运动数据入手,借助b样条曲线对三维离散数据进行插值扩充,可有效提升颞下颌关节运动模拟的可靠性和实用性。
2、本发明提供一种颞下颌关节运动模拟仿真方法,其包括以下步骤:
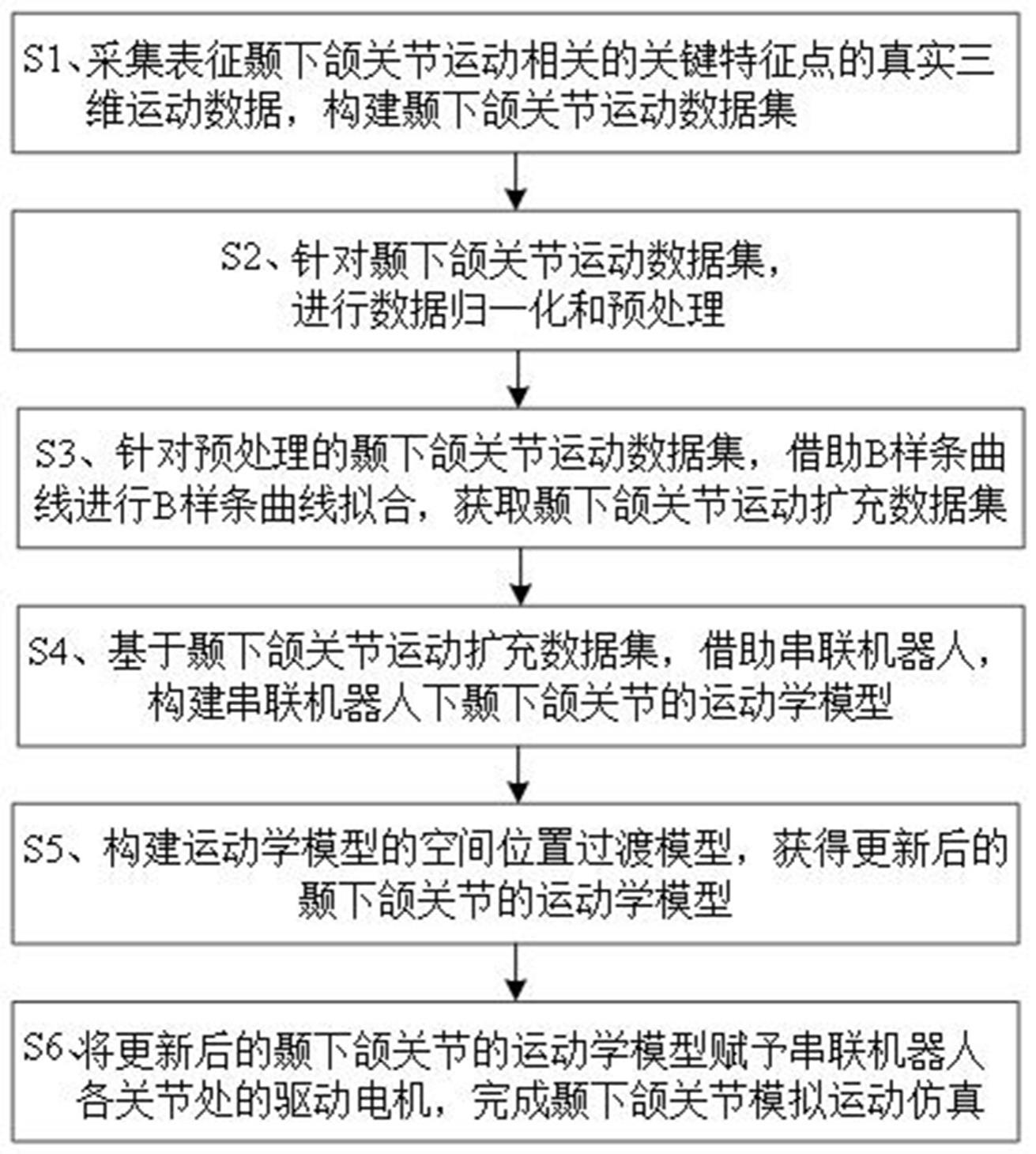
3、s1、采集表征颞下颌关节运动相关的关键特征点的真实三维运动数据,构建颞下颌关节运动数据集:采集开闭口运动时颞下颌关节运动相关的关键特征点的三维离散数据,所述关键特征点包括下颌角点、下切牙点和髁突顶点;
4、s2、针对颞下颌关节运动数据集,进行数据归一化和预处理;
5、s3、针对预处理的颞下颌关节运动数据集,借助b样条曲线进行b样条曲线拟合,获取颞下颌关节运动扩充数据集;
6、s31、基于关键特征点的预处理数据(x p, y p, z p),计算b样条曲线的控制点(x c, y c, z c);
7、s32、基于b样条曲线的控制点(x c, y c, z c),设定插值点数 n,进行三次周期性b样条曲线拟合,获取关键特征点的扩充数据(x k, y k, z k),得到颞下颌关节运动扩充数据集;
8、s4、基于颞下颌关节运动扩充数据集,借助串联机器人,构建串联机器人下颞下颌关节的运动学模型;
9、s41、选取六轴串联机器人,将颞下颌关节运动扩充数据集作为串联机器人末端执行器的坐标点集合;
10、s42、基于颞下颌关节运动扩充数据集,通过运动学反解依次计算关键特征点的运动轨迹所对应的串联机器人各关节的驱动角度集合,完成串联机器人下颞下颌关节的运动学模型的构建:
11、 φ = f (x k, y k, z k) (3)
12、其中, φ表示串联机器人各关节的驱动角度集合且为 φ=( θ1, θ2, θ3, θ4, θ5, θ6), θ i表示第 i个关节的驱动角度且 i=1 ~6; f表示串联机器人下颞下颌关节的运动学模型对应关系函数;
13、s5、构建运动学模型的空间位置过渡模型,获得更新后的颞下颌关节的运动学模型:基于颞下颌关节的运动学模型,采用直线与圆弧的折曲线组合将相邻两个离散点光滑连接,构建运动学模型的空间位置过渡模型,进而获得更新后的颞下颌关节的运动学模型;所述运动学模型的空间位置过渡模型为:
14、 (4)
15、其中, γ表示相邻两个离散点的过渡曲线; l s表示第一离散点(x1, y1, z1)到第一过渡点(x2, y2, z2)的第一直线段; c m表示第一过渡点(x2, y2, z2)到第二过渡点(x3, y3,z3)的圆弧曲线段; l e表示第二过渡点(x3, y3, z3)到第二离散点(x4, y4, z4)的第二直线段;
16、s6、将更新后的颞下颌关节的运动学模型赋予串联机器人各关节处的驱动电机,完成颞下颌关节模拟运动仿真。
17、进一步,所述步骤s13具体包括以下步骤:
18、s21、针对颞下颌关节上关键特征点的三维离散数据(x, y, z),获取关键特征点的归一化数据(x ´, y ´, z ´):
19、 (1)
20、其中,xmax,xmin,分别表示关键特征点x方向上的最大值、最小值和平均值;ymax,ymin,分别表示关键特征点y方向上的最大值、最小值和平均值;zmax,zmin,分别表示关键特征点z方向上的最大值、最小值和平均值;
21、s22、针对关键特征点的归一化数据(x ´, y ´, z ´),借助半径滤波去除离群点,获得关键特征点的预处理数据(x p, y p, z p)。
22、可优选的,所述步骤s22中所述半径滤波采用以当前数据点为球心、以 r为半径的球面去除离群点,其中半径 r的计算为:
23、 r = kr ijmax (2)
24、其中, r ijmax表示相邻两个数据点的距离的最大值; k表示保留率。
25、可优选的,所述步骤s5中所述第一直线段与圆弧曲线段相切连接,所述圆弧曲线段与第二直线段相切连接;所述第一直线段与所述第一离散点前的所述第二直线段共线,所述第二直线段与所述第二离散点后的所述第一直线段共线。
26、进一步,所述第一直线段、圆弧曲线段和第二直线段的长度依据总和最小原则设定。
27、与现有技术相比,本发明的技术效果为:
28、1、本发明提出的一种颞下颌关节运动模拟仿真方法,从颞下颌关节的真实运动数据入手,借助b样条曲线对三维离散数据进行插值、拟合和扩充,能够有效提升颞下颌关节运动模拟的可靠性和实用性,具有较强的临床应用价值。
29、2、本发明提出的一种颞下颌关节运动模拟仿真方法,针对颞下颌关节运动进行模拟,以关节突的运动为研究对象,通过对关节突的运动情况采集和分析,研究了关节突和关节窝的相对运动情况,并较好地利用实测到的大量与颞下颌关节运动相关的参数进行仿真分析,从而再现出颞下颌关节突的运动轨迹情况。
30、3、借助串联机器人和表征颞下颌关节运动相关的关键特征点的三维离散数据,构建串联机器人下颞下颌关节的运动学模型,有助于通过机器人加工出精确的人工颞下颌关节,探索更适宜的人工颞下颌关节材料组合、成型技术,进而延长全颞下颌关节置换术的术后使用时间,助力于关节置换过程的数字化与精准化控制。
- 还没有人留言评论。精彩留言会获得点赞!