一种基于二维码路标机器人定位方法
本发明涉及计算机视觉处理方法的,尤其涉及一种基于二维码路标机器人定位方法。
背景技术:
1、机器人定位和方向时机器人巡航等工作的基础,传统的机器人定位通常通过电磁轨道定位、激光雷达定位、gps定位等方法,其中电激光雷达定位与gps定位受环境限制较大,蓝牙、超声波定位等部署困难。
2、本方法是将计算机视觉与二维码相结合,设计的一种基于多路标的机器人定位算法,该方法首先将场景定位信息形成二维码路标,然后通过视觉计算结合二维码标签包含的数据结果完成位姿与实际位置的转换,根据相邻时刻的位置信息完成机器人朝向信息的计算。该方法以视觉计算为基础,且二维码标签具有较强的容错性,在多场景下可快速完成设备安装以进行计算,本发明考虑在多标签状态下完成计算,具有较好的鲁棒性以及较高的精度。与其它定位算法相比,该方法部署方便,实施灵活。
技术实现思路
1、本发明的目的在于提供一种基于二维码路标机器人定位方法,通过图像处理结合二维码标签完成相机位姿计算,然后完成位姿与位置的转换继而得出机器人当前位置与朝向信息。
2、一种基于二维码路标机器人定位方法,包括如下步骤:
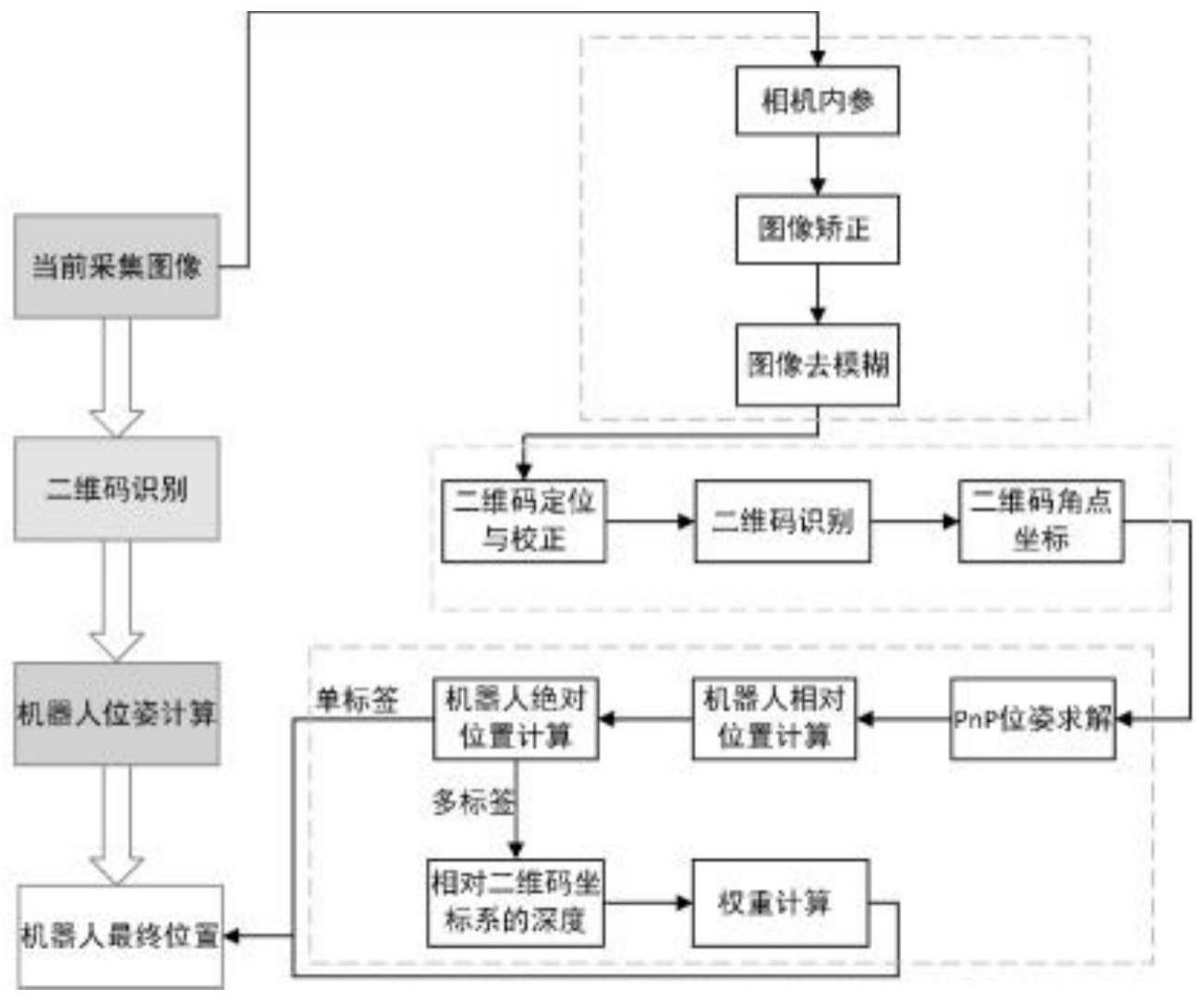
3、步骤s1:对机器人采集的二维码图像进行预处理,其中包括图像质量检测、二维码标签可读性检测以及图像的去模糊;对处理完毕的图像,进行二维码的数据读取以及特征点的提取,继而完成机器人相对二维码标签的位姿计算;
4、步骤s2:对步骤s1中计算的位姿通过分区原则与二维码标签包含的数据完成实际位置与朝向信息的计算。
5、优选的是,本发明步骤s1的具体过程包括:
6、步骤s1.1:将园区内二维码标签的定位数据统一编码,采用1版本h纠错级别的qr码完成相机位姿的计算;
7、步骤s1.2:完成图像质量检测与提升;首先对已捕获的图像进行质量检测,检测是否包含二维码、二维码标签是否可识别,二维码标签识别必要条件是三个定位角点是否清晰,数据区域是否清晰;若图像不包含二维码,则无法完成定位计算,进行反馈或继续行驶;若图像包含二维码但不可识别,则对图像进行去模糊处理;
8、步骤s1.3:对可识别的二维码图像建立二维码三维坐标系;以二维码中心点为原点,以相机采集方向为z轴正方向建立三维坐标系;
9、步骤s1.4:位姿计算前数据准备;首先对二维码标签数据进行读取以及二维码2d角点与三维坐标系下点一一对应,对读取的二维码标签数据进行转换,查找是否包含二维码尺寸,若包含则完成二维码3d状态下以mm为单位的坐标计算,并与2d状态下以像素为单位的角点坐标完成一一对应,继而完成步骤s1.6中的机器人相对二维码标签的位姿计算;若不包含二维码尺寸,则完成步骤s1.5中的二维码尺寸计算;
10、步骤s1.5:二维码标签尺寸计算;若当前捕获图像中仅包含单个标签,则无法完成二维码标签尺寸计算;若包含多个标签,则通过提取多个标签内的二维码数据,通过实际二维码间隔与二维码四个特征角点之间的像素间隔完成像素与实际距离的比例转换,继而通过二维码角点间的像素距离与该比例完成二维码的实际尺寸计算;
11、步骤s1.6:完成机器人相对于二维码的位姿计算;首先完成前期收集的2d与3d的点对点的特征计算,得出机器人转换至二维码坐标系的旋转向量与平移向量,已知二维码中心点为原点,通过三者求出机器人相对二维码三维坐标系下的坐标;由公式pc=r×po+t,定义pc为相机坐标系的点值,po为世界坐标系的点值,r、t为世界坐标系和相机坐标系的相对外参;对于二维码来说,pc为二维码的中心点,pc的坐标为(0,0,0),则通过已求出的旋转平移向量即可求出机器人的坐标po,即po=-r-1×t。
12、优选的是,本发明步骤s2的具体过程包括:
13、步骤s2.1:分区原则;首先步骤s1完成的机器人于二维码坐标系的相对位姿,在全局环境中,根据实际场景设定一定的分区原则才能完成位置的转化;假设以二维码包围的区域中心为全局环境的原点,按照45°至135°的90°区间完成360°的四个分区的划分,则在不同分区中分别使用相对位置中的x坐标和z坐标完成分区原则计算方法的制定;
14、步骤s2.2:二维码标签数据介绍;二维码标签必须包含的数据包括二维码标签在实际场景中的坐标以及二维码唯一标识,通过zbar完成二维码数据的提取;
15、步骤s2.3:完成位置的转化;通过分区原则、二维码绝对位置、相对二维码的位姿三者综合计算完成位置的转换;同时若存在多个二维码标签,则根据机器人相对二维码的深度完成以深度和权重成反比的原则进行综合计算;
16、步骤s2.4:朝向信息的计算;根据步骤s2.3中的位置计算,通过相邻时刻位置差的反正切计算出机器人方位上的角度数据,然后根据坐标差的正负来判断东、南、西、北四个方向,其中x方向差值的负值为西,正值为东;y方向差值的负值为南,正值为北。
17、本发明的基于二维码路标机器人定位方法,在计算机视觉的基础上,通过识别带有二维码的路标,计算出机器人当前位置与朝向的方法。
18、本发明采用二维码路标,利用巡航机器人常具有的摄像设备,抗干扰性强、可快速识别,导航环境部署方便,场景的适用性强。利用视觉计算技术,定位精度可以达到厘米级,精度高,可以满足低速自动驾驶的需求。
技术特征:
1.一种基于二维码路标机器人定位方法,其特征在于包括如下步骤:
2.根据权利要求1所述的基于二维码路标机器人定位方法,其特征在于上述步骤s1的具体过程包括:
3.根据权利要求2所述的基于二维码路标机器人定位方法,其特征在于上述步骤s2的具体过程包括:
技术总结
一种基于二维码路标机器人定位方法,涉及计算机视觉处理方法的技术领域。包括如下步骤:步骤S1:对机器人采集的二维码图像进行预处理,其中包括图像质量检测、二维码标签可读性检测以及图像的去模糊;对处理完毕的图像,进行二维码的数据读取以及特征点的提取,继而完成机器人相对二维码标签的位姿计算;步骤S2:对步骤S1中计算的位姿通过分区原则与二维码标签包含的数据完成实际位置与朝向信息的计算。本发明通过图像处理结合二维码标签完成相机位姿计算,然后完成位姿与位置的转换继而得出机器人当前位置与朝向信息。
技术研发人员:李锋,余彦君,方秀,李悦
受保护的技术使用者:东华大学
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!