一种基于无人机的灌丛覆盖度测量方法与流程
本发明属于植被遥感测量领域,具体涉及一种基于无人机的灌丛覆盖度测量方法。
背景技术:
1、在约占陆地总面积41%的干旱/半干旱草原地区,生活着近24亿人口,大多以畜牧业为主,其中,10%~20%的干旱/半干旱区草地正经历灌丛化。灌丛化,指的是原生木本植物的密度、盖度和生物量增加的现象,是近一个多世纪以来干旱/半干旱区草地植被变化的主要表现之一。灌丛覆盖度(fraction of shrubs coverage, fsc)指的是灌丛的垂直投影面积占草地总面积的比例,它直接反映了草地灌丛化的严重程度。准确测量fsc对于掌握灌丛化草地的空间分布和了解干旱/半干旱区草地的灌丛化进程有着至关重要的意义。
2、现有技术中,一般采用无人机进行灌丛植被的识别。无人机能够快速获取高分辨率、高精度的多光谱数据,准确识别灌丛植被,且能够获取正射影像,符合灌丛覆盖度定义中“垂直投影”的概念,因此基于无人机多光谱数据对灌丛覆盖度进行测量是准确可靠的方法。例如,公开号为cn115187875a的中国专利,公开了一种灌丛和疏林生物量碳库的无人机遥感监测方法,通过获取待监测区域的无人机遥感影像,拼接形成区域真彩色遥感影像和数字高程数据,再根据真彩色遥感影像提取灌丛和疏林斑块,获取灌丛和疏林盖度;根据灌丛和疏林斑块,结合数字高程数据获取灌丛和疏林高度;根据所获取的灌丛和疏林斑块的盖度和高度数据求取生物量碳库。但是上述方法仍需要手工勾勒出遥感影像中每一株灌丛和树木的斑块,不能充分发挥遥感影像的优势,监测效率和准确度比较低。
技术实现思路
1、鉴于现有技术中的上述缺陷或不足,本发明旨在提供一种基于无人机的灌丛覆盖度测量方法,基于无人机所采集的遥感数据和影像数据,采用lsms算法进行数据处理,从而计算灌丛覆盖度,保证灌丛覆盖度计算准确的前提下,提高测量效率,实现灌丛的实时监测。
2、为了实现上述目的,本发明实施例采用如下技术方案:
3、一种基于无人机的灌丛覆盖度测量方法,包括如下步骤:
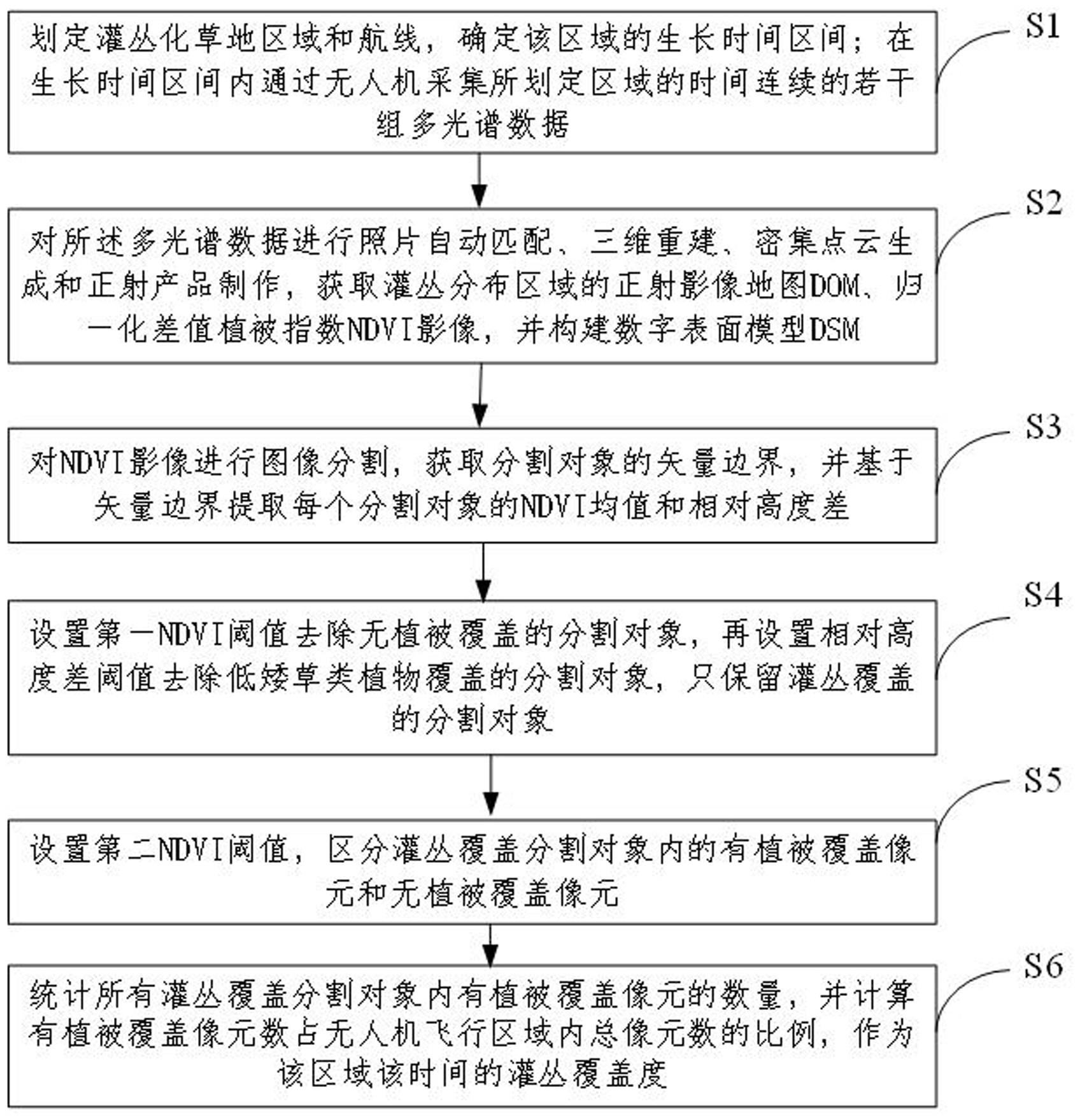
4、步骤s1,划定灌丛化草地区域和航线,确定该区域的生长时间区间;在生长时间区间内通过无人机采集所划定区域的时间连续的若干组多光谱数据;
5、步骤s2,对所述多光谱数据进行照片自动匹配、三维重建、密集点云生成和正射产品制作,获取灌丛化草地区域的正射影像地图dom、归一化差值植被指数ndvi影像,并构建数字表面模型dsm;
6、步骤s3,对ndvi影像进行图像分割,获取分割对象的矢量边界,并基于矢量边界提取每个分割对象的ndvi均值和相对高度差;
7、步骤s4,设置第一ndvi阈值去除无植被覆盖的分割对象,再设置相对高度差阈值去除低矮草类植物覆盖的分割对象,只保留灌丛覆盖分割对象;
8、步骤s5,设置第二ndvi阈值,区分灌丛覆盖分割对象内的有植被覆盖像元和无植被覆盖像元;
9、步骤s6,统计所有灌丛覆盖分割对象内有植被覆盖像元的数量,并计算有植被覆盖像元数占无人机飞行区域内总像元数的比例,作为该区域该时间的灌丛覆盖度。
10、作为本发明的一个优选实施例,所述划定灌丛化草地区域和航线,选择远离道路、城镇以及明显障碍物的空旷区域;设置航向、旁向重叠度分别为80%、70%,飞行高度为50米。
11、作为本发明的一个优选实施例,所述无人机采用大疆精灵4多光谱版无人机。
12、作为本发明的一个优选实施例,所述ndvi取值范围为[-1,1];数字正射影像地图dom是rgb真彩色影像。
13、作为本发明的一个优选实施例,所述照片自动匹配、三维重建、密集点云生成和正射产品制作,采用dji terra软件完成。
14、作为本发明的一个优选实施例,所述对ndvi影像进行图像分割,采用lsms算法,包括3个参数:空间半径,定义同一分割对象中像元之间的最大欧氏空间距离;范围半径,同一分割对象中像元之间的光谱特征值最大欧氏距离;最小分割尺寸,分割对象包含的最少像元数量。
15、作为本发明的一个优选实施例,步骤s4具体包括:
16、步骤s41,设置第一ndvi阈值,以高于第一ndvi阈值的分割对象作为有植被覆盖区,而低于第一ndvi阈值的分割对象作为无植被覆盖区,区分分割对象是否有植被覆盖,保留ndvi均值高于第一ndvi阈值的分割对象;
17、步骤s42,对所保留的有植被覆盖区的分割对象,设置相对高度差阈值,以高于相对高度差阈值的分割对象作为灌丛覆盖分割对象,以低于相对高度差阈值的分割对象作为稀疏草类植被覆盖区,并最终保留灌丛覆盖分割对象。
18、作为本发明的一个优选实施例,所述第一ndvi阈值为0.1。
19、作为本发明的一个优选实施例,所述相对高度差阈值为0.15m。
20、作为本发明的一个优选实施例,灌丛覆盖度fsc的计算公式如下:
21、
22、其中, p shrub为有植被覆盖像元数,为无人机飞行区范围内总像元数。
23、本发明实施例所提供的技术方案具有如下有益效果:
24、所提供的基于无人机的灌丛覆盖度测量方法,通过无人机遥感获取灌丛化草地的多光谱数据,通过对数据的预处理获取灌丛分布区域的dom、ndvi和dsm,再基于lsms算法对ndvi数据进行分割,提取每个分割对象范围内的ndvi均值和相对高度差,通过设置第一ndvi阈值和相对高度差阈值获取灌丛覆盖分割对象,再基于dom提取灌丛覆盖分割对象内像元的ndvi值,并通过第二ndvi阈值的设置,区分有植被覆盖像元和无植被覆盖像元;最后计算有植被覆盖像元数占无人机飞行区域内总像元数的比例,从而得到灌丛覆盖度。本发明的测量方法无需人工参与,基于图像分割算法测量灌丛对草地的覆盖度,且计算结果准确,测量效率高,能够实现对灌丛草地的实时监测。
25、当然,实施本发明的任一产品或方法并不一定需要同时达到以上所述的所有优点。
技术特征:
1.一种基于无人机的灌丛覆盖度测量方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的基于无人机的灌丛覆盖度测量方法,其特征在于,所述划定灌丛化草地区域和航线,选择远离道路、城镇以及明显障碍物的空旷区域;设置航向、旁向重叠度分别为80%、70%,飞行高度为50米。
3.根据权利要求1所述的基于无人机的灌丛覆盖度测量方法,其特征在于,所述ndvi取值范围为[-1,1];数字正射影像地图dom是 rgb真彩色影像。
4.根据权利要求3所述的基于无人机的灌丛覆盖度测量方法,其特征在于,所述照片自动匹配、三维重建、密集点云生成和正射产品制作,采用采用dji terra软件完成。
5.根据权利要求1所述的基于无人机的灌丛覆盖度测量方法,其特征在于,所述对ndvi影像进行图像分割,采用lsms算法,包括3个参数:空间半径,定义同一分割对象中像元之间的最大欧氏空间距离;范围半径,同一分割对象中像元之间的光谱特征值最大欧氏距离;最小分割尺寸,分割对象包含的最少像元数量。
6.根据权利要求1所述的基于无人机的灌丛覆盖度测量方法,其特征在于,步骤s4具体包括:
7.根据权利要求6所述的基于无人机的灌丛覆盖度测量方法,其特征在于,所述第一ndvi阈值为0.1。
8.根据权利要求6所述的基于无人机的灌丛覆盖度测量方法,其特征在于,所述相对高度差阈值为0.15m。
9.根据权利要求1所述的基于无人机的灌丛覆盖度测量方法,其特征在于,灌丛覆盖度fsc的计算公式如下:
技术总结
本发明提供了一种基于无人机的灌丛覆盖度测量方法,属于植被遥感测量领域。所述测量方法通过无人机遥感获取灌丛化草地的多光谱数据,通过对数据的预处理获取灌丛分布区域的DOM、NDVI和DSM,再基于LSMS算法对NDVI数据进行分割,提取每个分割对象范围内的NDVI均值和相对高度差,通过设置第一NDVI阈值和相对高度差阈值,识别出灌丛覆盖分割对象,再基于DOM提取灌丛覆盖的分割对象内像元的NDVI值,并通过第二NDVI阈值的设置,区分有植被覆盖像元和无植被覆盖像元;最后计算有植被覆盖像元数占区域内总像元数的比例,得到灌丛覆盖度。本发明无需人工参与,计算结果准确,测量效率高,实现了对灌丛化草地的实时监测。
技术研发人员:孙斌,岳巍,高志海,李毅夫,闫紫钰
受保护的技术使用者:中国林业科学研究院资源信息研究所
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!