一种基于双目图像的场景流检测方法、系统、设备及介质与流程
本发明涉及计算机视觉,尤其是一种基于双目图像的场景流检测方法、系统、设备及介质。
背景技术:
1、随着高速公路的交通流量增加,交通通行情况也变得越来越复杂。为了提高高速公路的通行效率,越来越多的交通事件检测技术不断被投入使用。相比于采用激光雷达、毫米波雷达进行高速公路检测的技术,基于相机的检测算法可以提供稠密点云,并且可以提供可视化的结果,可以为高层次的高速公路调度任务提供更好的支持。然而,当前基于相机的高速公路检测主要集中对车辆的识别,难以获得目标的位置和运动信息,在高速公路监控中的实时性和准确率不佳。综合上述,相关技术中存在的技术问题亟需得到解决。
技术实现思路
1、有鉴于此,本发明实施例提供一种基于双目图像的场景流检测方法、系统、设备及介质,以获取场景流信息。
2、一方面,本发明提供了一种基于双目图像的场景流检测方法,包括:
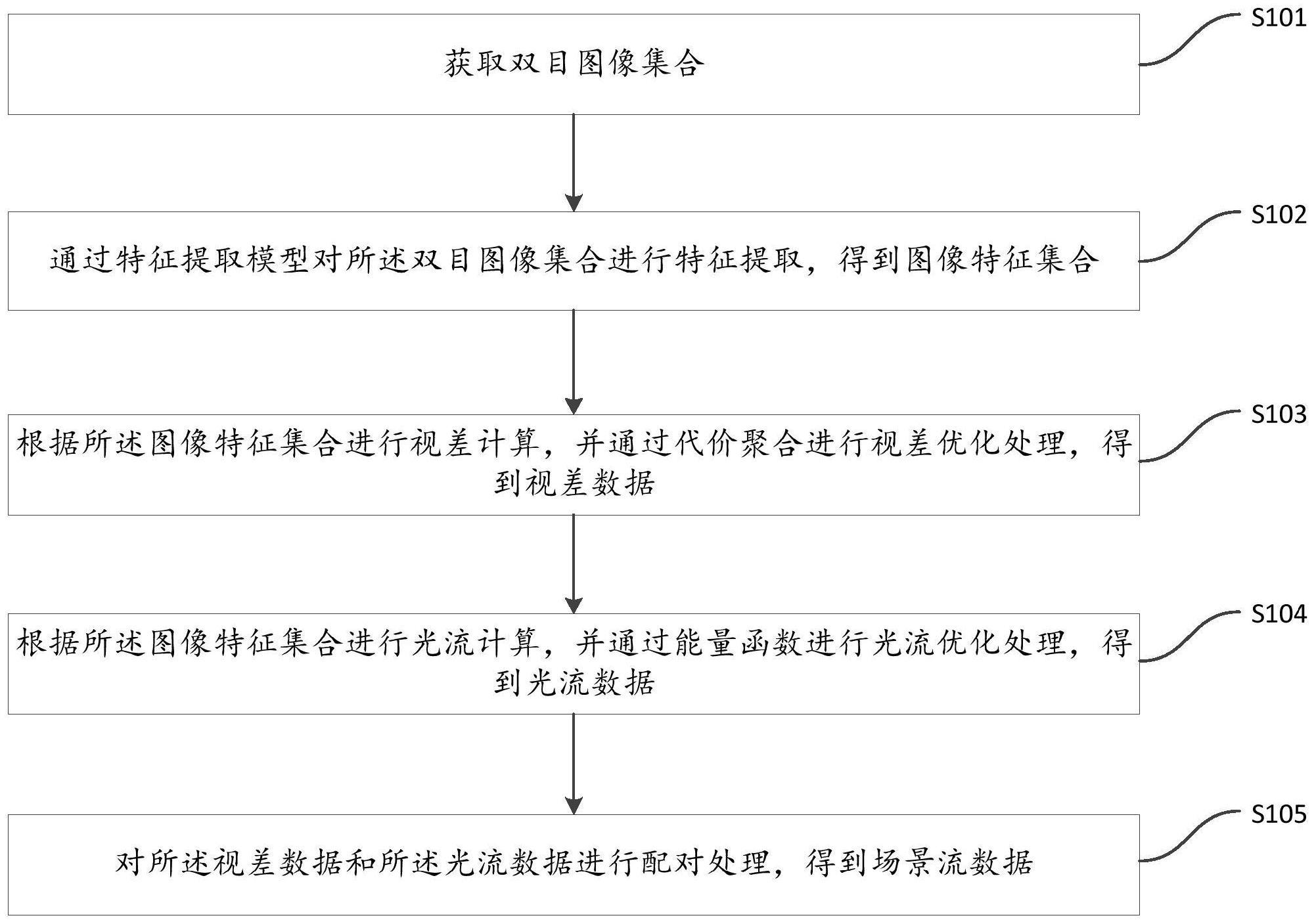
3、获取双目图像集合;
4、通过特征提取模型对所述双目图像集合进行特征提取,得到图像特征集合;
5、根据所述图像特征集合进行视差计算,并通过代价聚合进行视差优化处理,得到视差数据;
6、根据所述图像特征集合进行光流计算,并通过能量函数进行光流优化处理,得到光流数据;
7、对所述视差数据和所述光流数据进行配对处理,得到场景流数据。
8、可选地,所述获取双目图像集合,包括:
9、通过双目相机或双目摄像头获取双目图像集合,所述双目图像集合包括当前帧视图和相邻帧视图,所述当前帧视图包括左视图和右视图,所述相邻帧视图为所述当前帧视图的前一帧视图或后一帧视图。
10、可选地,所述通过特征提取模型对所述双目图像集合进行特征提取,得到图像特征集合,包括:
11、对所述双目图像集合进行图像划分处理,得到划分图像集合;
12、将所述划分图像集合输入到所述特征提取模型进行卷积计算、归一化计算和二值化计算,得到图像特征集合,所述特征提取模型基于二值卷积网络构建得到。
13、可选地,所述根据所述图像特征集合进行视差计算,并通过代价聚合进行视差优化处理,得到视差数据,包括:
14、获取图像特征集合,所述图像特征集合包括左视图特征和右视图特征;
15、对所述左视图特征和右视图特征进行匹配代价计算处理,根据计算得到的匹配代价进行最小值代价选取,得到初始视差;
16、根据所述初始视差选取备选视差,对所述初始视差和所述备选视差进行代价聚合处理,选取最小值聚合代价为视差数据。
17、可选地,所述根据所述图像特征集合进行光流计算,并通过能量函数进行光流优化处理,得到光流数据,包括:
18、获取图像特征集合,所述图像特征集合包括第一特征和第二特征;
19、对所述第一特征和所述第二特征进行特征块匹配处理,得到匹配特征块;
20、根据所述匹配特征块进行光流计算,得到初始光流;
21、根据所述初始光流、所述第一特征和所述第二特征构造得到能量函数;
22、根据所述能量函数对所述初始光流进行还原和匹配处理,得到光流数据。
23、可选地,所述对所述双目图像集合进行图像划分处理,得到划分图像集合,包括:
24、对所述双目图像集合中的每一个图像进行像素点选取处理,得到像素点集合;
25、以所述像素点集合中每一个像素点为中心进行划分处理,得到划分图像集合。
26、可选地,所述根据所述初始视差选取备选视差,对所述初始视差和所述备选视差进行代价聚合处理,选取最小值聚合代价为视差数据,包括:
27、对所述初始视差进行视差优化处理,并对优化后的视差进行选取处理,得到备选视差;
28、对所述初始视差和所述备选视差进行代价聚合处理,选取最小值聚合代价为视差数据。
29、另一方面,本发明实施例还提供了一种基于双目图像的场景流检测系统,包括:
30、第一模块,用于获取双目图像集合;
31、第二模块,用于通过特征提取模型对所述双目图像集合进行特征提取,得到图像特征集合;
32、第三模块,用于根据所述图像特征集合进行视差计算,并通过代价聚合进行视差优化处理,得到视差数据;
33、第四模块,用于根据所述图像特征集合进行光流计算,并通过能量函数进行光流优化处理,得到光流数据;
34、第五模块,用于对所述视差数据和所述光流数据进行配对处理,得到场景流数据。
35、可选地,所述第一模块,用于获取双目图像集合,包括:
36、第一单元,用于通过双目相机或双目摄像头获取双目图像集合,所述双目图像集合包括当前帧视图和相邻帧视图,所述当前帧视图包括左视图和右视图,所述相邻帧视图为所述当前帧视图的前一帧视图或后一帧视图。
37、可选地,所述第二模块,用于通过特征提取模型对所述双目图像集合进行特征提取,得到图像特征集合,包括:
38、第二单元,用于对所述双目图像集合进行图像划分处理,得到划分图像集合;
39、第三单元,用于将所述划分图像集合输入到所述特征提取模型进行卷积计算、归一化计算和二值化计算,得到图像特征集合,所述特征提取模型基于二值卷积网络构建得到。
40、可选地,所述第三模块,用于根据所述图像特征集合进行视差计算,并通过代价聚合进行视差优化处理,得到视差数据,包括:
41、第四单元,用于获取图像特征集合,所述图像特征集合包括左视图特征和右视图特征;
42、第五单元,用于对所述左视图特征和右视图特征进行匹配代价计算处理,根据计算得到的匹配代价进行最小值代价选取,得到初始视差;
43、第六单元,用于根据所述初始视差选取备选视差,对所述初始视差和所述备选视差进行代价聚合处理,选取最小值聚合代价为视差数据。
44、可选地,所述第四模块,用于根据所述图像特征集合进行光流计算,并通过能量函数进行光流优化处理,得到光流数据,包括:
45、第七单元,用于获取图像特征集合,所述图像特征集合包括第一特征和第二特征;
46、第八单元,用于对所述第一特征和所述第二特征进行特征块匹配处理,得到匹配特征块;
47、第九单元,用于根据所述匹配特征块进行光流计算,得到初始光流;
48、第十单元,用于根据所述初始光流、所述第一特征和所述第二特征构造得到能量函数;
49、第十一单元,用于根据所述能量函数对所述初始光流进行还原和匹配处理,得到光流数据。
50、可选地,所述第一单元,用于对所述双目图像集合进行图像划分处理,得到划分图像集合,包括:
51、对所述双目图像集合中的每一个图像进行像素点选取处理,得到像素点集合;
52、以所述像素点集合中每一个像素点为中心进行划分处理,得到划分图像集合。
53、可选地,所述第六单元,用于根据所述初始视差选取备选视差,对所述初始视差和所述备选视差进行代价聚合处理,选取最小值聚合代价为视差数据,包括:
54、对所述初始视差进行视差优化处理,并对优化后的视差进行选取处理,得到备选视差;
55、对所述初始视差和所述备选视差进行代价聚合处理,选取最小值聚合代价为视差数据。
56、另一方面,本发明实施例还公开了一种电子设备,包括处理器以及存储器;
57、所述存储器用于存储程序;
58、所述处理器执行所述程序实现如前面所述的方法。
59、另一方面,本发明实施例还公开了一种计算机可读存储介质,所述存储介质存储有程序,所述程序被处理器执行实现如前面所述的方法。
60、另一方面,本发明实施例还公开了一种计算机程序产品或计算机程序,该计算机程序产品或计算机程序包括计算机指令,该计算机指令存储在计算机可读存储介质中。计算机设备的处理器可以从计算机可读存储介质读取该计算机指令,处理器执行该计算机指令,使得该计算机设备执行前面的方法。
61、本发明采用以上技术方案与现有技术相比,具有以下技术效果:本发明实施例通过特征提取模型对所述双目图像集合进行特征提取,能够提高特征提取的准确率,并将提取得到的特征分别进行视差优化处理和光流优化处理,得到场景流数据,能够提高场景流数据的准确率和稳定性,从而准确地获取目标的位置和运动信息,提高监控的实时性和准确率。
- 还没有人留言评论。精彩留言会获得点赞!