一种确定膝关节运动轨迹的方法、装置与流程
本技术涉及图像处理,特别是涉及一种确定膝关节运动轨迹的方法、装置、计算机设备和存储介质。
背景技术:
1、膝关节由股骨、髌骨、胫骨构成,当软骨体积和厚度发生变化会导致髌骨运动轨迹异常,从而产生膝关节疾病。对髌骨运动轨迹的研究主要涉及股骨、髌骨和胫骨三个部分,目前,利用连续帧的电子计算机断层扫描(computed tomography,ct)图像,获得膝关节运动轨迹等中间量,从而间接对膝关节疾病进行诊断和治疗是目前临床上的常规方法,但在膝关节屈伸过程中,拍摄的多张连续影像之间往往会有误差,而对于髌骨轨迹测量的方式主要通过建立膝关节坐标系,通过拍摄连续帧影像追踪而来,这对屈伸膝范围、操作者专业技术以及患者配合度有很高的要求,从而影响诊断效率。
技术实现思路
1、基于此,提供一种确定膝关节运动轨迹的方法、装置、计算机设备和存储介质,改善现有技术中确定膝关节运动轨迹的效率较低的问题。
2、第一方面,提供一种确定膝关节运动轨迹的方法,所述方法包括:获取多帧的膝关节点云数据,并对所述膝关节点云数据进行点云配准,获得各个所述膝关节点云数据的配准矩阵,其中,所述膝关节点云数据包括股骨点云数据、髌骨点云数据、胫骨点云数据,所述配准矩阵包括股骨配准矩阵、髌骨配准矩阵、胫骨配准矩阵,以使各帧所述膝关节点云数据处于同一坐标系下;根据所述股骨配准矩阵、髌骨配准矩阵、胫骨配准矩阵,对所述膝关节点云数据的第一坐标信息进行归一化处理,获得所述膝关节点云数据的第二坐标信息;根据参考帧的所述股骨点云数据、髌骨点云数据和胫骨点云数据进行点云配准,分别获得各个所述股骨点云数据与所述参考帧的股骨点云数据的股骨配准矩阵,各个所述髌骨点云数据与所述参考帧的髌骨点云数据的髌骨配准矩阵,各个所述胫骨点云数据与所述参考帧的胫骨点云数据的胫骨配准矩阵。
3、结合第一方面,在第一方面的第一种可实施方式中,获取多帧的膝关节点云数据,并对所述膝关节点云数据进行点云配准,获得各个所述膝关节点云数据的配准矩阵,其中,所述膝关节点云数据包括股骨点云数据、髌骨点云数据、胫骨点云数据,所述配准矩阵包括股骨配准矩阵、髌骨配准矩阵、胫骨配准矩阵,包括:获取连续多帧的膝关节点云数据,并从所述多帧中确定一帧作为参考帧,其中,所述膝关节点云数据包括股骨点云数据、髌骨点云数据和胫骨点云数据;根据参考帧的所述股骨点云数据、髌骨点云数据和胫骨点云数据进行点云配准,分别获得各个所述股骨点云数据与所述参考帧的股骨点云数据的股骨配准矩阵,各个所述髌骨点云数据与所述参考帧的髌骨点云数据的髌骨配准矩阵,各个所述胫骨点云数据与所述参考帧的胫骨点云数据的胫骨配准矩阵。
4、结合第一方面,在第一方面的第二种可实施方式中,根据所述股骨配准矩阵、髌骨配准矩阵、胫骨配准矩阵,对所述膝关节点云数据的第一坐标信息进行归一化处理,获得所述膝关节点云数据的第二坐标信息,包括:从所述参考帧的股骨点云数据中确定股骨特征点及第一坐标信息,并根据所述股骨配准矩阵和所述股骨特征点的第一坐标信息,对各个所述股骨点云数据的第一坐标信息进行归一化处理,获得所述各个股骨点云数据的第二坐标信息;从所述参考帧的髌骨点云数据中确定髌骨特征点及第一坐标信息,并根据所述股骨配准矩阵、所述髌骨配准矩阵和所述髌骨特征点的第一坐标信息,对各个所述髌骨点云数据的第一坐标信息进行归一化处理,获得所述各个髌骨点云数据的第二坐标信息;从所述参考帧的胫骨点云数据中确定胫骨特征点及第一坐标信息,并根据所述股骨配准矩阵、所述胫骨配准矩阵和所述胫骨点云数据特征点的第一坐标信息,对各个所述胫骨点云数据的第一坐标信息进行归一化处理,获得所述各个胫骨点云数据的第二坐标信息。
5、结合第一方面,在第一方面的第三种可实施方式中,根据所述股骨配准矩阵、髌骨配准矩阵、胫骨配准矩阵,对所述膝关节点云数据的第一坐标信息进行归一化处理,获得所述膝关节点云数据的第二坐标信息,还包括:根据所述股骨配准矩阵和所述股骨特征点的第一坐标信息,对各个数据帧中的所述股骨点云数据进行特征点追踪,获得各个数据帧中相应的股骨特征点的特征点坐标信息;根据所述髌骨配准矩阵和所述髌骨特征点的第一坐标信息,对各个数据帧中的所述髌骨点云数据进行特征点追踪,获得各个数据帧中相应的髌骨特征点的特征点坐标信息;根据所述胫骨配准矩阵和所述胫骨特征点的第一坐标信息,对各个数据帧中的所述胫骨点云数据进行特征点追踪,获得各个数据帧中相应的胫骨特征点的特征点坐标信息。
6、结合第一方面,在第一方面的第四种可实施方式中,所述特征点坐标信息的数学表达为:
7、
8、其中,p'gi为第i帧的股骨特征点的特征点坐标信息,p'bi为第i帧的髌骨特征点的特征点坐标信息,p'ji为第i帧的胫骨特征点的特征点坐标信息,m'gi1为第i帧的股骨特征点到参考帧的股骨特征点的配准矩阵,m'bi1为第i帧的髌骨特征点到参考帧的髌骨特征点的配准矩阵,m'ji1为第i帧的胫骨特征点到参考帧的胫骨特征点的配准矩阵,p'g1为参考帧的股骨特征点的第一坐标信息,p,b1为参考帧的髌骨特征点的第一坐标信息,p,j1为参考帧的胫骨特征点的第一坐标信息。
9、结合第一方面,在第一方面的第五种可实施方式中,第二坐标信息的数学表达为:
10、
11、其中,pgi为第i帧的股骨点云数据的第二坐标信息,pbi为第i帧的髌骨点云数据的第二坐标信息,pji为第i帧的胫骨点云数据的第二坐标信息,mgi1为第i帧的股骨点云数据到参考帧的股骨点云数据的配准矩阵,mbi1为第i帧的髌骨点云数据到参考帧的髌骨点云数据的配准矩阵,mji1为第i帧的胫骨点云数据到参考帧的胫骨点云数据的配准矩阵,pg1为参考帧的股骨点云数据的第一坐标信息,pb1为参考帧的髌骨点云数据的第一坐标信息,pj1为参考帧的胫骨点云数据的第一坐标信息。
12、结合第一方面,在第一方面的第六种可实施方式中,计算所述第二坐标信息与拟合坐标信息间的误差,并对所述误差进行迭代以缩小所述误差,并根据所述误差更新所述拟合坐标信息,以获得膝关节运动轨迹,其中,所述拟合坐标信息根据对所述膝关节运动轨迹进行轨迹拟合获得,包括:对所述各个膝关节点云数据进行轨迹拟合,获得相应的拟合坐标信息;计算所述各个膝关节点云数据的第二坐标信息与第一拟合坐标信息间的第一误差,并通过梯度下降对所述第一误差进行迭代,获得迭代结果;根据所述迭代结果对所述第一拟合坐标信息进行更新,获得膝关节运动轨迹。
13、结合第一方面,在第一方面的第七种可实施方式中,第二坐标信息与第一拟合坐标信息间的第一误差的数学表达为:
14、
15、其中,e1(ω1)为横轴方向的第一误差,e2(ω2)为纵轴方向的第一误差,e3(ω3)为竖轴方向的第一误差,x(ti,ω1)为横轴方向的第一拟合坐标信息,y(ti,ω2)为纵轴方向的第一拟合坐标信息,z(ti,ω3)为竖轴方向对的第一拟合坐标信息,xi为横轴方向的第二坐标信息,yi为纵轴方向的第二坐标信息,zi为竖轴方向对的第二坐标信息。
16、结合第一方面,在第一方面的第八种可实施方式中,根据所述迭代结果对所述第一拟合坐标信息进行就更新,获得膝关节运动轨迹,包括:根据所述迭代结果对所述第一拟合坐标信息进行更新后,获得更新后的第二拟合坐标信息;计算所述第二坐标信息与所述第二拟合坐标信息间的第二误差;若所述第二误差小于或等于误差阈值,则根据所述第二拟合坐标信息获得所述膝关节运动轨迹;若所述第二误差大于所述误差阈值,则对所述第二误差进行迭代。
17、第二方面,提供了一种确定膝关节运动轨迹的装置,所述装置包括点云配准模块、坐标变换模块和轨迹拟合模块,其中:
18、点云配准模块,用于获取多帧的膝关节点云数据,并对所述膝关节点云数据进行点云配准,获得各个所述膝关节点云数据的配准矩阵,其中,所述膝关节点云数据包括股骨点云数据、髌骨点云数据、胫骨点云数据,所述配准矩阵包括股骨配准矩阵、髌骨配准矩阵、胫骨配准矩阵,以使各帧所述膝关节点云数据处于同一坐标系下;
19、坐标变换模块,用于根据所述股骨配准矩阵、髌骨配准矩阵、胫骨配准矩阵,对所述膝关节点云数据的第一坐标信息进行归一化处理,获得所述膝关节点云数据的第二坐标信息;
20、轨迹拟合模块,用于根据参考帧的所述股骨点云数据、髌骨点云数据和胫骨点云数据进行点云配准,分别获得各个所述股骨点云数据与所述参考帧的股骨点云数据的股骨配准矩阵,各个所述髌骨点云数据与所述参考帧的髌骨点云数据的髌骨配准矩阵,各个所述胫骨点云数据与所述参考帧的胫骨点云数据的胫骨配准矩阵。
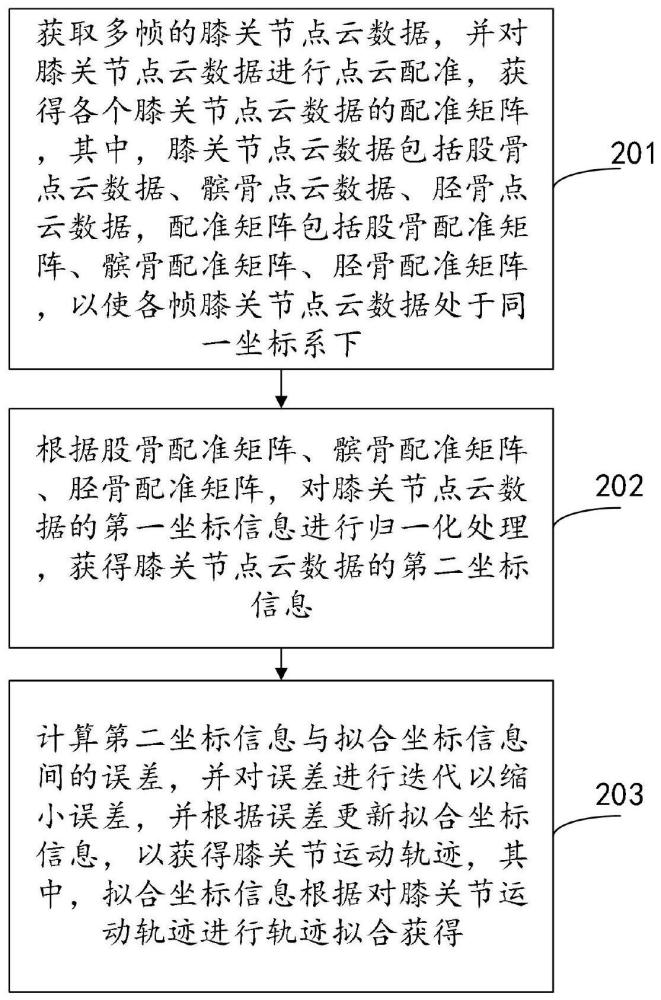
21、第三方面,提供了一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如下步骤:获取多帧的膝关节点云数据,并对膝关节点云数据进行点云配准,获得各个膝关节点云数据的配准矩阵,其中,膝关节点云数据包括股骨点云数据、髌骨点云数据、胫骨点云数据,配准矩阵包括股骨配准矩阵、髌骨配准矩阵、胫骨配准矩阵,以使各帧膝关节点云数据处于同一坐标系下;根据股骨配准矩阵、髌骨配准矩阵、胫骨配准矩阵,对膝关节点云数据的第一坐标信息进行归一化处理,获得膝关节点云数据的第二坐标信息;计算第二坐标信息与拟合坐标信息间的误差,并对误差进行迭代以缩小误差,并根据误差更新拟合坐标信息,以获得膝关节运动轨迹,其中,拟合坐标信息根据对膝关节运动轨迹进行轨迹拟合获得。
22、第四方面,提供一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现如下步骤:获取多帧的膝关节点云数据,并对膝关节点云数据进行点云配准,获得各个膝关节点云数据的配准矩阵,其中,膝关节点云数据包括股骨点云数据、髌骨点云数据、胫骨点云数据,配准矩阵包括股骨配准矩阵、髌骨配准矩阵、胫骨配准矩阵,以使各帧膝关节点云数据处于同一坐标系下;根据股骨配准矩阵、髌骨配准矩阵、胫骨配准矩阵,对膝关节点云数据的第一坐标信息进行归一化处理,获得膝关节点云数据的第二坐标信息;计算第二坐标信息与拟合坐标信息间的误差,并对误差进行迭代以缩小误差,并根据误差更新拟合坐标信息,以获得膝关节运动轨迹,其中,拟合坐标信息根据对膝关节运动轨迹进行轨迹拟合获得。
23、上述确定膝关节运动轨迹的方法、装置、计算机设备和存储介质,可以应用于对连续多帧的膝关节影像检测中,用于获取膝关节的运动轨迹,通过将获取多帧的膝关节点云数据,并对膝关节点云数据进行点云配准,获得各个膝关节点云数据的配准矩阵,根据股骨配准矩阵、髌骨配准矩阵、胫骨配准矩阵,对膝关节点云数据的第一坐标信息进行归一化处理,获得膝关节点云数据的第二坐标信息;计算第二坐标信息与拟合坐标信息间的误差,并对误差进行迭代以缩小误差,并根据误差更新拟合坐标信息,以获得膝关节运动轨迹,改善现有技术中确定膝关节运动轨迹的效率较低的问题。
- 还没有人留言评论。精彩留言会获得点赞!