基于VR的体育动作评分方法、系统、电子设备及存储介质
本发明属于基于虚拟现实的电数字数据处理的,具体地涉及一种基于vr的体育动作评分方法、系统、电子设备及存储介质。
背景技术:
1、随着近年来科技飞速发展,各种先进的科技成果不断地运用在体育的训练中,如:虚拟现实技术(vr)在篮球、排球、游泳等项目的运用,使得运动员的技术和运动成绩不断提高。通过对虚拟现实技术的研究和了解,使其灵活的应用到网球教学中,不仅可以使学习内容、教学手段更加丰富,还可以提高网球学习的效率及效果。
2、目前,基于虚拟现实技术应用在网球学习的相关现有技术中,由于网球击球动作是连贯性且在极短时间内完成,意味着网球的运动轨迹具有复杂性、多变性等特点,现行运动轨迹的数据采集方式在精度方面并不高,影响了以运动轨迹数据为基础的网球学习质量。并且,现有基于虚拟现实技术的网球学习中无法知道自身动作是否与标准动作相一致而不能及时修正自身动作错误,以及没有针对学习效果给出量化指标的评分,导致难以发现网球学习中的击球过程中所存在的学习问题,从而不能针对性进行指导,影响了网球学习的效率及效果。
3、因此,提出一种实时及高精度的基于vr的体育动作评分技术,显得尤为重要。
技术实现思路
1、为了解决上述技术问题,本发明提供了一种基于vr的体育动作评分方法、系统、电子设备及存储介质,可以提升基于vr的体育动作评分的准确性及实时性。
2、第一方面,本技术提供了一种基于vr的体育动作评分方法,其包括:
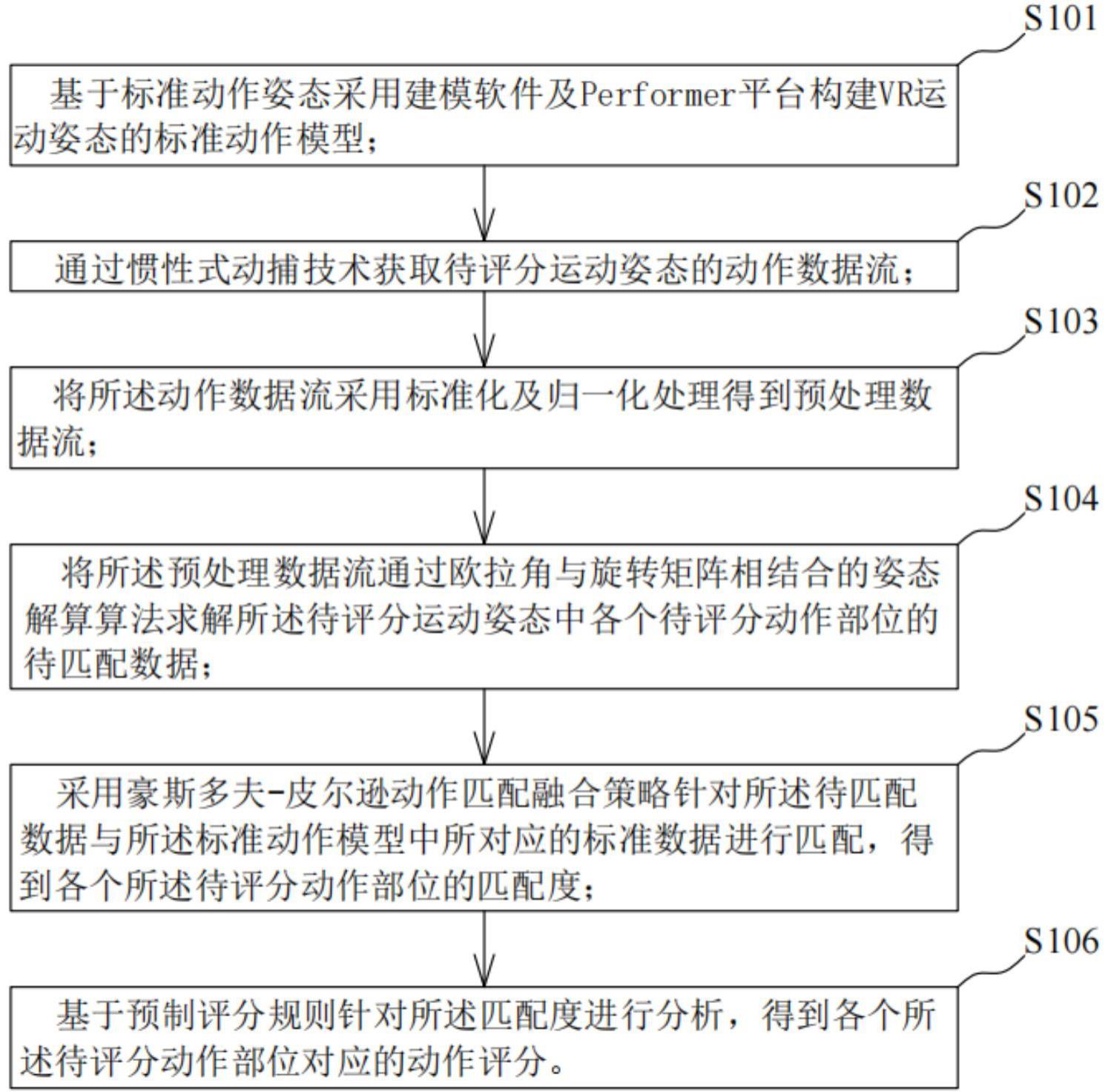
3、基于标准动作姿态采用建模软件及performer平台构建vr运动姿态的标准动作模型;
4、通过惯性式动捕技术获取待评分运动姿态的动作数据流;
5、将所述动作数据流采用标准化及归一化处理得到预处理数据流;
6、将所述预处理数据流通过欧拉角与旋转矩阵相结合的姿态解算算法求解所述待评分运动姿态中各个待评分动作部位的待匹配数据;
7、采用豪斯多夫-皮尔逊动作匹配融合策略针对所述待匹配数据与所述标准动作模型中所对应的标准数据进行匹配,得到各个所述待评分动作部位的匹配度;
8、基于预制评分规则针对所述匹配度进行分析,得到各个所述待评分动作部位对应的动作评分。
9、优选地,所述基于标准动作姿态采用建模软件及performer平台构建vr运动姿态的标准动作模型的步骤具体包括:
10、将标准运动姿态的实时场景通过vr技术转化成虚拟场景;
11、分割所述虚拟场景得到所述标准运动姿态对应的各标准动作集合;
12、采用alias建模软件建立所述各标准动作集合的子模型;
13、针对所述子模型进行色彩光照纹理处理得到子模型数据库;
14、采用performer平台从所述子模型数据库中提取各所述子模型进行装配和链接,构建所述标准运动姿态的标准动作模型。
15、优选地,所述通过惯性式动捕技术获取待评分运动姿态的动作数据流的步骤具体包括:
16、基于传感设备获取待评分运动姿态的光学坐标;
17、根据所述光学坐标输出所述待评分运动姿态的光学轨迹;
18、根据所述光学轨迹确定运动姿态关节的角度变化数据;
19、将所述光学轨迹及所述角度变化数据关联拟合得到所述待评分运动姿态的动作数据流。
20、优选地,所述将所述动作数据流采用标准化及归一化处理得到预处理数据流的步骤具体包括:
21、将所述动作数据流拆解为x、y、z三个维度的角度数据流;
22、通过unity-3d将所述角度数据流转化成对应维度的单维欧拉角;
23、将各所述单维欧拉角采用z-score算法处理得到标准化数据流;
24、采用归一化函数将所述标准化数据流的向量进行归一化处理得到预处理数据。
25、优选地,所述将所述预处理数据流通过欧拉角与旋转矩阵相结合的姿态解算算法求解所述待评分运动姿态中各个待评分动作部位的待匹配数据的步骤包括:
26、基于绕x、y、z轴旋转的旋转矩阵求解所述预处理数据中初始欧拉角;
27、通过计算绕轴旋转的角速度与采用时间周期的积分可以得到姿态角的变化量;
28、将所述初始欧拉角与所述变化量相加得到更新欧拉角;
29、将所述初始欧拉角及所述更新欧拉角采用姿态解算算法解算得到所述待评分运动姿态中各个待评分动作部位的待匹配数据。
30、优选地,所述姿态解算算法具体如下:
31、;
32、式中, roll、 pitch、 yaw表示解算后的欧拉角, roll0、 pitch0表示上一时刻被解算的欧拉角, r、 p分别表示上一时刻被解算的欧拉角的roll角和pitch角, r'、 p'、y'分别表示被解算后的欧拉角的roll角、pitch角、yaw角, α和 β表示比例系数。
33、优选地,所述豪斯多夫-皮尔逊动作匹配融合策略具体包括:
34、计算均值豪斯多夫相似度与中值豪斯多夫相似度的较大者,并将较大者与皮尔逊相关系数计算差值;
35、设定第一阈值及第二阈值,且所述第二阈值大于第一阈值;
36、若所述差值的绝对值不大于第一阈值,则融合相似度取均值豪斯多夫相似度、中值豪斯多夫相似度、皮尔逊相关系数三者的最小值;
37、若所述差值的绝对值在第一阈值及第二阈值之间,则融合相似度取均值豪斯多夫相似度与中值豪斯多夫相似度之间的较小者;
38、若所述差值的绝对值大于第二阈值,则融合相似度取均值豪斯多夫相似度、中值豪斯多夫相似度、皮尔逊相关系数三者的均值。
39、第二方面,本技术提供了一种基于vr的体育动作评分系统,包括:
40、标准构建模块,用于基于标准动作姿态采用建模软件及performer平台构建vr运动姿态的标准动作模型;
41、数据捕捉模块,用于通过惯性式动捕技术获取待评分运动姿态的动作数据流;
42、数据处理模块,用于将所述动作数据流采用标准化及归一化处理得到预处理数据流;
43、姿态解算模块,用于将所述预处理数据流通过欧拉角与旋转矩阵相结合的姿态解算算法求解所述待评分运动姿态中各个待评分动作部位的待匹配数据;
44、数据匹配模块,用于采用豪斯多夫-皮尔逊动作匹配融合策略针对所述待匹配数据与所述标准动作模型中所对应的标准数据进行匹配,得到各个所述待评分动作部位的匹配度;
45、分析评分模块,用于基于预制评分规则针对所述匹配度进行分析,得到各个所述待评分动作部位对应的动作评分。
46、优选地,所述标准构建模块具体包括:
47、虚拟单元,用于将标准运动姿态的实时场景通过vr技术转化成虚拟场景;
48、分割单元,用于分割所述虚拟场景得到所述标准运动姿态对应的各标准动作集合;
49、建立单元,用于采用alias建模软件建立所述各标准动作集合的子模型;
50、纹理单元,用于针对所述子模型进行色彩光照纹理处理得到子模型数据库;
51、构建单元,用于采用performer平台从所述子模型数据库中提取各所述子模型进行装配和链接,构建所述标准运动姿态的标准动作模型。
52、优选地,所述数据捕捉模块具体包括:
53、传感单元,用于基于传感设备获取待评分运动姿态的光学坐标;
54、输出单元,用于根据所述光学坐标输出所述待评分运动姿态的光学轨迹;
55、确定单元,用于根据所述光学轨迹确定运动姿态关节的角度变化数据;
56、拟合单元,用于将所述光学轨迹及所述角度变化数据关联拟合得到所述待评分运动姿态的动作数据流。
57、优选地,所述数据处理模块具体包括:
58、拆解单元,用于将所述动作数据流拆解为x、y、z三个维度的角度数据流;
59、转化单元,用于通过unity-3d将所述角度数据流转化成对应维度的单维欧拉角;
60、标准化单元,用于将各所述单维欧拉角采用z-score算法处理得到标准化数据流;
61、归一化单元,用于采用归一化函数将所述标准化数据流的向量进行归一化处理得到预处理数据。
62、优选地,所述姿态解算模块具体包括:
63、求解单元,用于基于绕x、y、z轴旋转的旋转矩阵求解所述预处理数据中初始欧拉角;
64、积分单元,用于通过计算绕轴旋转的角速度与采用时间周期的积分可以得到姿态角的变化量;
65、相加单元,用于将所述初始欧拉角与所述变化量相加得到更新欧拉角;
66、解算单元,用于将所述初始欧拉角及所述更新欧拉角采用姿态解算算法解算得到所述待评分运动姿态中各个待评分动作部位的待匹配数据。
67、第三方面,本技术提供了一种电子设备,包括存储器、处理器以及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如第一方面所述的基于vr的体育动作评分方法。
68、第四方面,本技术提供了一种存储介质,其上存储有计算机程序,该程序被处理器执行时实现如第一方面所述的基于vr的体育动作评分方法。
69、相比于现有技术,本技术提供的一种基于vr的体育动作评分方法、系统、电子设备及存储介质,具有以下有益效果:
70、1、采用alias工具可直接把场景内的情况变换成信息模式展现在建模中,通过performer平台可利用对建模等系列过程进行扩展或者函数调用,利用主语言功能直接对图形进行生成和实施交互式处理操作,为vr场景的层次结构提供较大的便利,可以提高整体处理效率。
71、2、利用惯性设备捕捉用户的动作,有着对环境的高适应性,不仅可以根据自己的需求获取和利用传感器的运动数据,而且可以得到更细致的动作数据,提高采集待评分运动姿态的动作数据流的精度。
72、3、采用基于豪斯多夫距离的算法,以克服每次采集的动作数据流长度可能不一致影响采集数据的精度,且因标准豪斯多夫距离易受噪声数据的影响选用均值豪斯多夫距离和中值豪斯多夫距离。
73、4、采用豪斯多夫-皮尔逊动作匹配融合策略针对所述待匹配数据与所述标准动作模型中所对应的标准数据进行匹配,提高待评分动作与标准动作之间匹配度的精度,从而提高待评分动作的评分准确性。
- 还没有人留言评论。精彩留言会获得点赞!