地面全景图像的多点地理定位方法及装置
本技术涉及计算机视觉,特别涉及一种地面全景图像的多点地理定位方法及装置。
背景技术:
1、地理图像定位(geo-localization)技术能够通过地面以及天空中拍摄的不同图像进行特征提取与匹配,进而获得与地面图像最佳匹配的天空拍摄图像,利用天空拍摄图像中所携带的经纬度海拔信息实现定位。
2、相关技术中,可以通过将单张地面视图图像与gps标记的单张遥感图图像进行匹配,以确定对应地理位置实现定位。
3、然而,相关技术中,因遥感图拍摄范围远高于地面摄像设备,使单张地面图出现在多张遥感图的视野中,导致单张地面图像检索到的遥感图唯一性不足,无法满足实际定位需求,降低了定位精度和鲁棒性,准确性不足,亟待解决。
技术实现思路
1、本技术提供一种地面全景图像的多点地理定位方法及装置,以解决相关技术中,因遥感图拍摄范围远高于地面摄像设备,使单张地面图出现在多张遥感图的视野中,导致单张地面图像检索到的遥感图唯一性不足,无法满足实际定位需求,降低了定位精度和鲁棒性,准确性不足等问题。
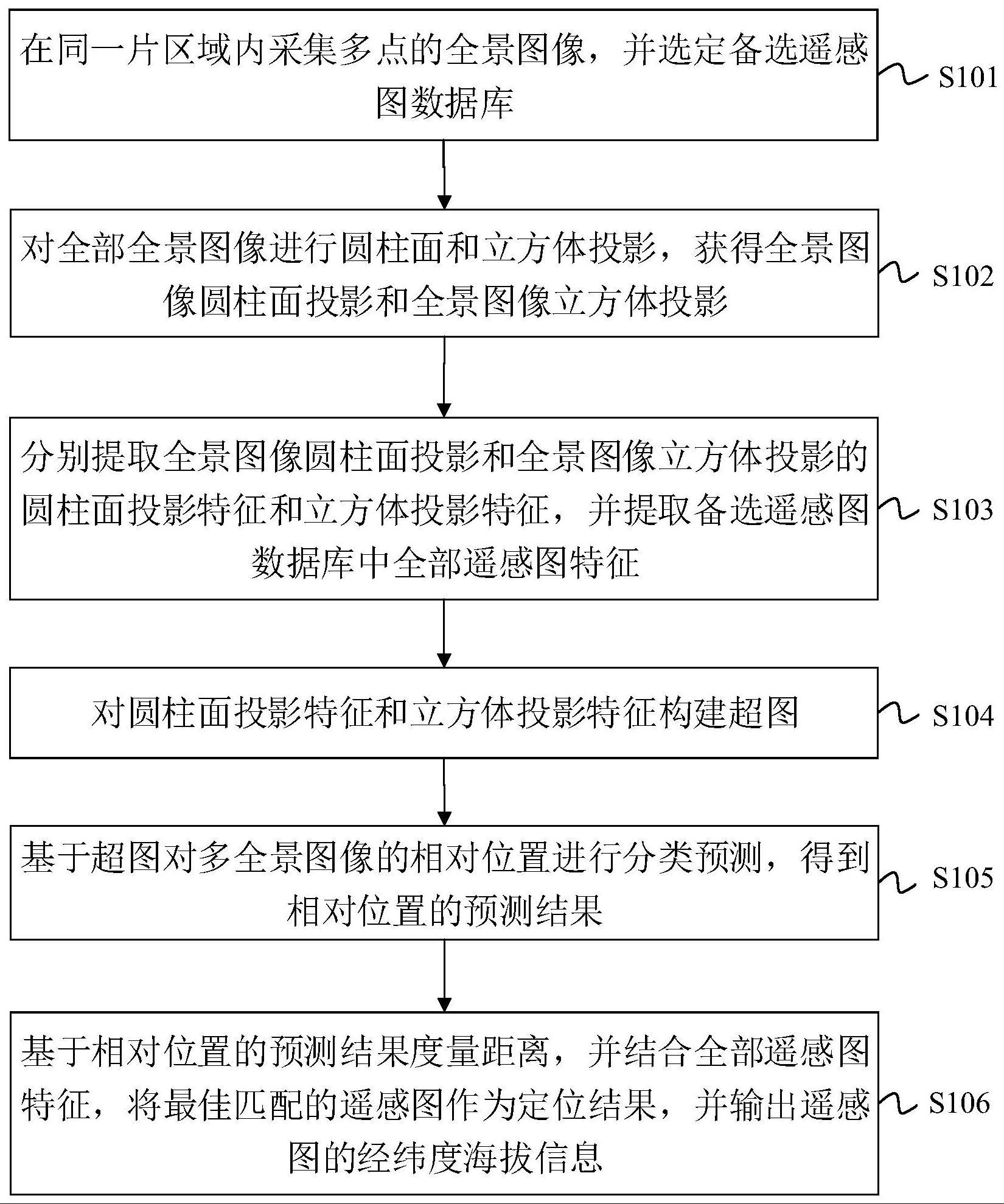
2、本技术第一方面实施例提供一种地面全景图像的多点地理定位方法,包括以下步骤:在同一片区域内采集多点的全景图像,并选定备选遥感图数据库;对全部全景图像进行圆柱面和立方体投影,获得全景图像圆柱面投影和全景图像立方体投影;分别提取所述全景图像圆柱面投影和所述全景图像立方体投影的圆柱面投影特征和立方体投影特征,并提取所述备选遥感图数据库中全部遥感图特征;对所述圆柱面投影特征和所述立方体投影特征构建超图;基于所述超图对多全景图像的相对位置进行分类预测,得到相对位置的预测结果;基于所述相对位置的预测结果度量距离,并结合所述全部遥感图特征,将最佳匹配的遥感图作为定位结果,并输出所述遥感图的经纬度海拔信息。
3、可选地,在本技术的一个实施例中,所述在同一片区域内采集多点的全景图像,并选定备选遥感图数据库,包括:将采集的地面图像记作全景图像;以地面点在遥感图上的偏移作为位置表示,对于每张遥感图,以预设分辨率对偏移进行离散化描述,指定首张全景图地面点离散化位置上的初始位置;选择并指定所述备选遥感图数据库,使得所述备选遥感图数据库中的遥感图覆盖输入的待定位的地面点。
4、可选地,在本技术的一个实施例中,所述分别提取所述全景图像圆柱面投影和所述全景图像立方体投影的圆柱面投影特征和立方体投影特征,并提取所述备选遥感图数据库中全部遥感图特征,包括:对所述全景图像的圆柱面投影进行特征提取,获得地面点的圆柱面投影特征;对所述全景图的立方体投影的六个面分别进行特征提取,对每个立方体投影的全景图进行方向拆解,获得六个面,以获得地面点的立方体投影特征;对所述遥感图数据库中的全部遥感图进行分块特征提取,将每个遥感图用特征向量进行表示,得到所述全部遥感图特征。
5、可选地,在本技术的一个实施例中,所述对所述圆柱面投影特征和所述立方体投影特征构建超图,包括:以全部全景图特征作为节点构建超图;将属于同一个地面全景图的圆柱面投影特征和立方体投影特征构建位置超边;对立方体投影通过k-hop最近邻方法构建方向超边;将所述位置超边和所述方向超边进行聚合,获得具有位置超边和方向超边的超图,其中,每个超图节点为全部全景图特征。
6、可选地,在本技术的一个实施例中,所述基于所述超图对多全景图像的相对位置进行分类预测,得到相对位置的预测结果,包括:在所述超图的全部超边指导下,对超图节点特征进行hcnnconv+卷积,获得全部节点的新特征;对所述全部节点的新特征在所述位置超边的指导下进行特征的超边聚合,获得新维度的特征;通过所述首张全景图地面点离散化位置和所述新维度的特征,将相对位置的分布转换成绝对位置的分布概率。
7、可选地,在本技术的一个实施例中,所述距离的计算公式为:
8、
9、其中,d为相对位置,dij为第i个全景图的圆柱面特征和第j个遥感图块的特征的欧氏距离,n为地面全景图的数量。
10、可选地,在本技术的一个实施例中,所述将最佳匹配的遥感图作为定位结果,并输出所述遥感图的经纬度海拔信息,包括:将与地面全景图组距离最近的遥感图作为所述定位结果,提取遥感图所携带的经纬度海拔信息作为最终定位结果。
11、本技术第二方面实施例提供一种地面全景图像的多点地理定位装置,包括:采集模块,用于在同一片区域内采集多点的全景图像,并选定备选遥感图数据库;投影模块,用于对全部全景图像进行圆柱面和立方体投影,获得全景图像圆柱面投影和全景图像立方体投影;提取模块,用于分别提取所述全景图像圆柱面投影和所述全景图像立方体投影的圆柱面投影特征和立方体投影特征,并提取所述备选遥感图数据库中全部遥感图特征;构建模块,用于对所述圆柱面投影特征和所述立方体投影特征构建超图;预测模块,用于基于所述超图对多全景图像的相对位置进行分类预测,得到相对位置的预测结果;定位模块,用于基于所述相对位置的预测结果度量距离,并结合所述全部遥感图特征,将最佳匹配的遥感图作为定位结果,并输出所述遥感图的经纬度海拔信息。
12、可选地,在本技术的一个实施例中,所述采集模块包括:采集单元,用于将采集的地面图像记作全景图像;离散单元,用于以地面点在遥感图上的偏移作为位置表示,对于每张遥感图,以预设分辨率对偏移进行离散化描述,指定首张全景图地面点离散化位置上的初始位置;选择单元,用于选择并指定所述备选遥感图数据库,使得所述备选遥感图数据库中的遥感图覆盖输入的待定位的地面点。
13、可选地,在本技术的一个实施例中,所述提取模块包括:第一提取单元,用于对所述全景图像的圆柱面投影进行特征提取,获得地面点的圆柱面投影特征;第二提取单元,用于对所述全景图的立方体投影的六个面分别进行特征提取,对每个立方体投影的全景图进行方向拆解,获得六个面,以获得地面点的立方体投影特征;第三提取单元,用于对所述遥感图数据库中的全部遥感图进行分块特征提取,将每个遥感图用特征向量进行表示,得到所述全部遥感图特征。
14、可选地,在本技术的一个实施例中,所述构建模块包括:第一构建单元,用于以全部全景图特征作为节点构建超图;第二构建单元,用于将属于同一个地面全景图的圆柱面投影特征和立方体投影特征构建位置超边;第三构建单元,用于对立方体投影通过k-hop最近邻方法构建方向超边;第一聚合单元,用于将所述位置超边和所述方向超边进行聚合,获得具有位置超边和方向超边的超图,其中,每个超图节点为全部全景图特征。
15、可选地,在本技术的一个实施例中,所述预测模块包括:卷积单元,用于在所述超图的全部超边指导下,对超图节点特征进行hcnnconv+卷积,获得全部节点的新特征;第二聚合单元,用于对所述全部节点的新特征在所述位置超边的指导下进行特征的超边聚合,获得新维度的特征;转换单元,用于通过所述首张全景图地面点离散化位置和所述新维度的特征,将相对位置的分布转换成绝对位置的分布概率。
16、可选地,在本技术的一个实施例中,所述距离的计算公式为:
17、
18、其中,d为相对位置,dij为第i个全景图的圆柱面特征和第j个遥感图块的特征的欧氏距离,n为地面全景图的数量。
19、可选地,在本技术的一个实施例中,所述定位模块包括:定位单元,用于将与地面全景图组距离最近的遥感图作为所述定位结果,提取遥感图所携带的经纬度海拔信息作为最终定位结果。
20、本技术第三方面实施例提供一种电子设备,包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述程序,以实现如上述实施例所述的地面全景图像的多点地理定位方法。
21、本技术第四方面实施例提供一种计算机可读存储介质,所述计算机可读存储介质存储计算机程序,该程序被处理器执行时实现如上的地面全景图像的多点地理定位方法。
22、本技术实施例可以基于多点的全景图像和遥感图的分块特征提取实现相对位置预测,从而计算距离度量,匹配最佳遥感图像得到定位结果,提升了定位结果的精度和鲁棒性,更加准确实用。由此,解决了相关技术中,因遥感图拍摄范围远高于地面摄像设备,使单张地面图出现在多张遥感图的视野中,导致单张地面图像检索到的遥感图唯一性不足,无法满足实际定位需求,降低了定位精度和鲁棒性,准确性不足等问题。
23、本技术附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本技术的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!