一种三维点云提取方法及提取系统与流程
本技术属于隧道工程测量及铁路装备检测领域,具体涉及一种基于多特征的三维点云提取方法及提取系统。
背景技术:
1、在隧道施工过程中,需要经常对不同时期的隧道进行断面质量检测。采用全站仪或激光断面仪的传统检测方法存在效率低、手段复杂、检测不全面等问题。随着三维扫描技术的发展,利用扫描仪获得隧道内海量三维点云数据,借助高效的点云处理算法,可以快速、准确、轻松地完成隧道断面质量检测任务。
2、如图1所示,三维激光扫描仪获取的初始点云数据包括隧道点云和非隧道点云,其中,非隧道点云种包括地面、车辆和人员等。因此采取高效的点云滤波算法剔除非隧道点云是提取干净、高质量隧道点云的关键。常用的点云滤波方法包括:(1)基于人工选择的滤波方法,该方法通过人机交互剔除非目标点云,不适合噪声点分布散乱的情况;(2)基于距离阈值的滤波方法,该方法通过设定具体阈值划分目标点云和非目标点云;因此该方法通用性差,且容易出现误判;(3)基于统计的滤波方法,该方法通过统计每个点与k近邻范围内各点之间的距离剔除离群点,但该方法无法剔除距离目标点云较近的噪声点;(4)基于随机采样一致性(random sample consensus,ransac)算法的滤波方法通过对不同平面进行拟合实现点云分割,该方法对参数依赖性较强,且针对特定物体平面。
技术实现思路
1、为至少在一定程度上克服相关技术中存在的问题,本技术提供了一种三维点云提取方法及提取系统。
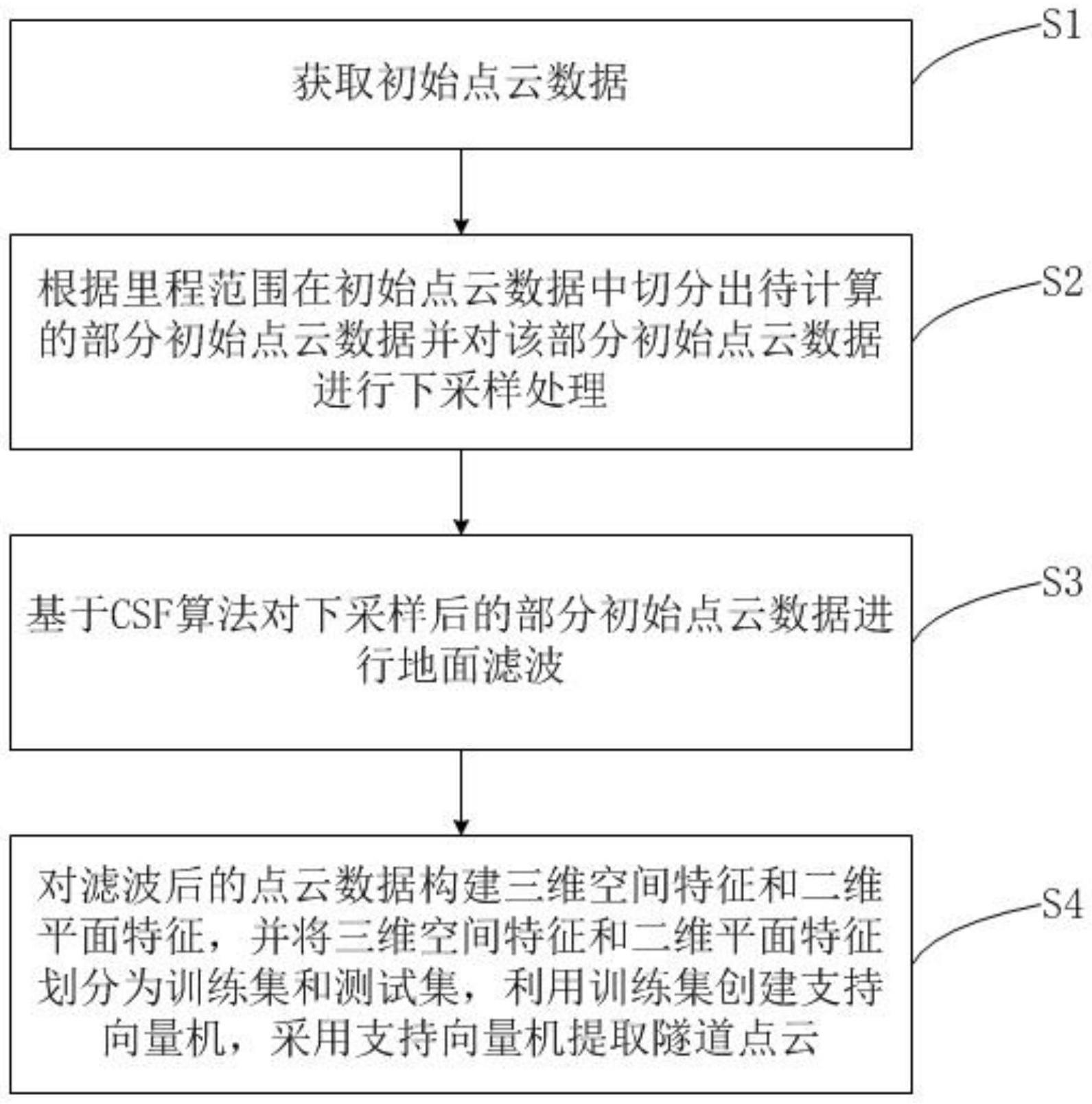
2、根据本技术实施例的第一方面,本技术提供了一种三维点云提取方法,其包括以下步骤:
3、获取初始点云数据;
4、根据里程范围在初始点云数据中切分出待计算的部分初始点云数据并对该部分初始点云数据进行下采样处理;
5、基于csf算法对下采样后的部分初始点云数据进行地面滤波;
6、对滤波后的点云数据构建三维空间特征和二维平面特征,并将三维空间特征和二维平面特征划分为训练集和测试集,利用训练集创建支持向量机,采用支持向量机提取隧道点云。
7、上述三维点云提取方法中,所述获取初始点云数据的方式为:
8、使用全站式扫描仪对隧道进行扫描,直接获取绝对坐标点云数据;
9、或者,使用地面式三维激光扫描仪与标靶结合的方式对隧道进行扫描,首先间接获取相对坐标点云数据,然后通过坐标配准转换为绝对坐标点云数据。
10、上述三维点云提取方法中,所述基于csf算法对下采样后的部分初始点云数据进行地面滤波的过程为:
11、对下采样后的部分初始点云数据进行过滤,滤除离群点,倒置点云;
12、初始布栅格化,根据实际点云密度确定栅格大小,初始位置位于点云纵坐标的最大值上;
13、将点云与栅格粒子投影至同一水平面,计算当前粒子能抵达的最低位置;
14、计算每个粒子在仅考虑重力时外力影响下移动的距离;
15、计算每个粒子在内力影响下移动的距离;
16、不断计算每个粒子在仅考虑重力时外力影响下移动的距离以及在内力影响下移动的距离,直到所有粒子的最大高度变化小于预设阈值或者迭代次数到达指定次数,计算停止;
17、计算栅格化粒子与原始点云的距离;
18、判断栅格化粒子与原始点云的距离是否小于预设的距离阈值,如果是,则判定当前点云为地面点云;否则,判定当前点云为非地面点云;
19、判断是否遍历完所有点云,如果是,则结束;否则,返回重新计算栅格化粒子与原始点云的距离。
20、进一步地,所述粒子在仅考虑重力时外力影响下移动的距离为:
21、
22、式中,x(t+δt)表示粒子在外力影响下移动的距离,x(t)表示粒子在t时刻的位置,x(t-δt)表示粒子在t-δt时刻的位置,δt表示时间间隔,g表示重力常数,m表示粒子质量,通常为1。
23、进一步地,所述粒子在内力影响下移动的距离为:
24、
25、式中,表示粒子的位移向量,当粒子为可移动粒子时,b=1;否则,b=0;表示当前粒子,表示的相邻粒子,表示垂直方向的归一化向量,
26、
27、进一步地,所述采用支持向量机提取隧道点云的过程为:
28、构建隧道点云特征向量;
29、根据构建的隧道点云特征向量,将滤波后的点云数据的三维空间特征和二维平面特征划分为训练集和测试集;
30、利用训练集创建支持向量机,获取最优参数下的支持向量机模型;
31、利用训练好的支持向量机模型,将测试集作为输入,对隧道点云进行二分类判别;如果输出结果为1,则判定当前输入为隧道点云,保留当前输入的测试集中的点云数据;如果输出结果为-1,则表示当前输入为非隧道点云,丢弃当前输入的测试集中的点云数据。
32、更进一步地,所述构建隧道点云特征向量的过程为:
33、在点云数据上构造三维kd-树,以将离散的三维点云转换为有关联的拓扑结构;
34、在kd-树中寻找每个点的邻近点云簇,点云簇的个数根据实际的点云密度进行确定;
35、计算邻近点云簇内所有点云的协方差特征值,构建三维空间特征和二维平面特征。
36、更进一步地,所述三维空间特征包括发散性指数sλ、平面性指数pλ、线性指数lλ、各向同性oλ、各向异性aλ、特征熵eλ、特征和∑λ、曲率变化cλ、垂直度v、点云簇z轴极差rz、点云簇z轴方差和点云簇密度d;
37、发散性指数sλ为:
38、平面性指数pλ为:
39、线性指数lλ为:
40、各向同性oλ为:
41、各向异性aλ为:
42、特征熵eλ为:
43、特征和∑λ为:∑λ=λ1+λ2+λ3;
44、曲率变化cλ为:
45、垂直度v为:v=1-nz;
46、点云簇z轴极差rz为:rz=max(z)-min(z);
47、点云簇z轴方差为:
48、点云簇密度d为:
49、上述各式中,λ1,λ2,λ3表示协方差特征值,nz表示每个点法向量的z轴分量,k表示使用kd-树近邻搜索点云簇的k值,r表示搜索半径;
50、二维平面特征包括隧道垂直横截面内每个点与轨顶之间的距离dis(i′,j);
51、
52、式中,表示实际轨顶位置的坐标,(x(i′,j),z(i′,j))表示第i′个横截面下第j个点。
53、更进一步地,所述利用训练集创建支持向量机,获取最优参数下的支持向量机模型的过程为:
54、定义分离超平面h(x),当h(x)=0时,表明样本点位于分离超平面上;当h(x)>0时,表明样本类别为y=1;当h(x)<0时,表明样本类别为y=-1;
55、h(x)的表达式为:
56、h(x)=wtx+b;
57、式中,w表示参数向量,b表示平移向量;
58、构建最优分离超平面的表达式为:
59、
60、式中,i5=1,2,…,m;
61、对最优分离超平面的表达式进行转换并引入拉格朗日乘子,化解后最终优化目标函数为:
62、
63、式中,α表示向量,i5和j均表示序号;
64、定义核函数和惩罚系数c>0,最终优化目标函数为:
65、
66、式中,j=1,2,…,m;
67、利用smo算法求解出向量α,并获得对应的参数向量w:
68、
69、根据kkt条件找出所有的s个支持向量,计算每个支持向量的平均值b:
70、
71、确定最优超平面,分类决策函数为:
72、f(x)=sign(wtx+b)。
73、根据本技术实施例的第二方面,本技术基于上述权利要求1~9任一项所述的三维点云提取方法还提供了一种三维点云提取系统,其包括扫描模块、下采样模块、滤波模块和提取模块;
74、所述扫描模块,用于获取初始点云数据;
75、所述下采样模块,用于根据里程范围在初始点云数据中切分出待计算的部分初始点云数据并对该部分初始点云数据进行下采样处理;
76、所述滤波模块,基于csf算法对下采样后的部分初始点云数据进行地面滤波,以对隧道内的地面进行识别和剔除;
77、所述提取模块,用于根据滤波后的点云数据得到训练集和测试集,并利用训练集创建支持向量机,采用支持向量机提取隧道点云。
78、根据本技术的上述具体实施方式可知,至少具有以下有益效果:本技术提供的三维点云提取方法通过采用csf算法对隧道内获取的初始点云进行地面滤波,随后将保留的离散三维点云转换为有关联的拓扑结构,构建多种三维空间特征与二维平面特征,以用于扩展点云数据,最后通过训练最优支持向量机模型快速、准确地提取出隧道点云,具有准确性高、鲁棒性好以及处理速度快等优势,本技术还可应用至铁路装备检测领域,可以准确剔除铁路罐车罐体点云中梯子、液位计、标靶等附件点云,保留罐壁数据,提升后续容积计算准确性,为铁路罐车智能检定检测奠定基础。
79、应了解的是,上述一般描述及以下具体实施方式仅为示例性及阐释性的,其并不能限制本技术所欲主张的范围。
- 还没有人留言评论。精彩留言会获得点赞!