一种障碍物运动轨迹确定方法、装置、设备及存储介质与流程
本发明涉及图像检测领域,具体而言,涉及一种障碍物运动轨迹确定方法、装置、设备及存储介质。
背景技术:
1、随着自动驾驶技术的快速发展,目标检测技术成为了自动驾驶技术中不可或缺的一个环节。在对车辆进行行驶路径的规划时通过目标检测技术利用各种传感器如相机、激光雷达、雷达等采集的图像数据,对车辆所处环境中的障碍物进行识别,根据识别得到的障碍物的运动轨迹对车辆的行驶路径进行规划,通过避开障碍物以提高自动驾驶车辆的安全性和智能性。
2、现有技术中,通常是使用滑动窗口法确定障碍物的运动轨迹。滑动窗口法是一种常见的目标检测方法,其基本思想是将一个固定大小的窗口在图像上以一定的步长进行滑动,并在每个窗口位置处使用分类器判断窗口中是否包含目标障碍物,然后再根据每个窗口中目标障碍物的位置得到其运动轨迹。但这种方法的计算复杂度较高,且在目标障碍物尺度和形状变化较大时,会出现目标障碍物无法完整的包含在一个窗口内,从而导致对窗口中是否包含目标障碍物的判断出现错误,使得无法正常根据窗口中目标障碍物的位置得到其运动轨迹,从而降低了障碍物运动轨迹的准确性。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种障碍物运动轨迹确定方法、装置、设备及存储介质,以提高确定得到的障碍物运动轨迹的准确性。
2、第一方面,本技术实施例提供了一种障碍物运动轨迹确定方法,所述方法包括:
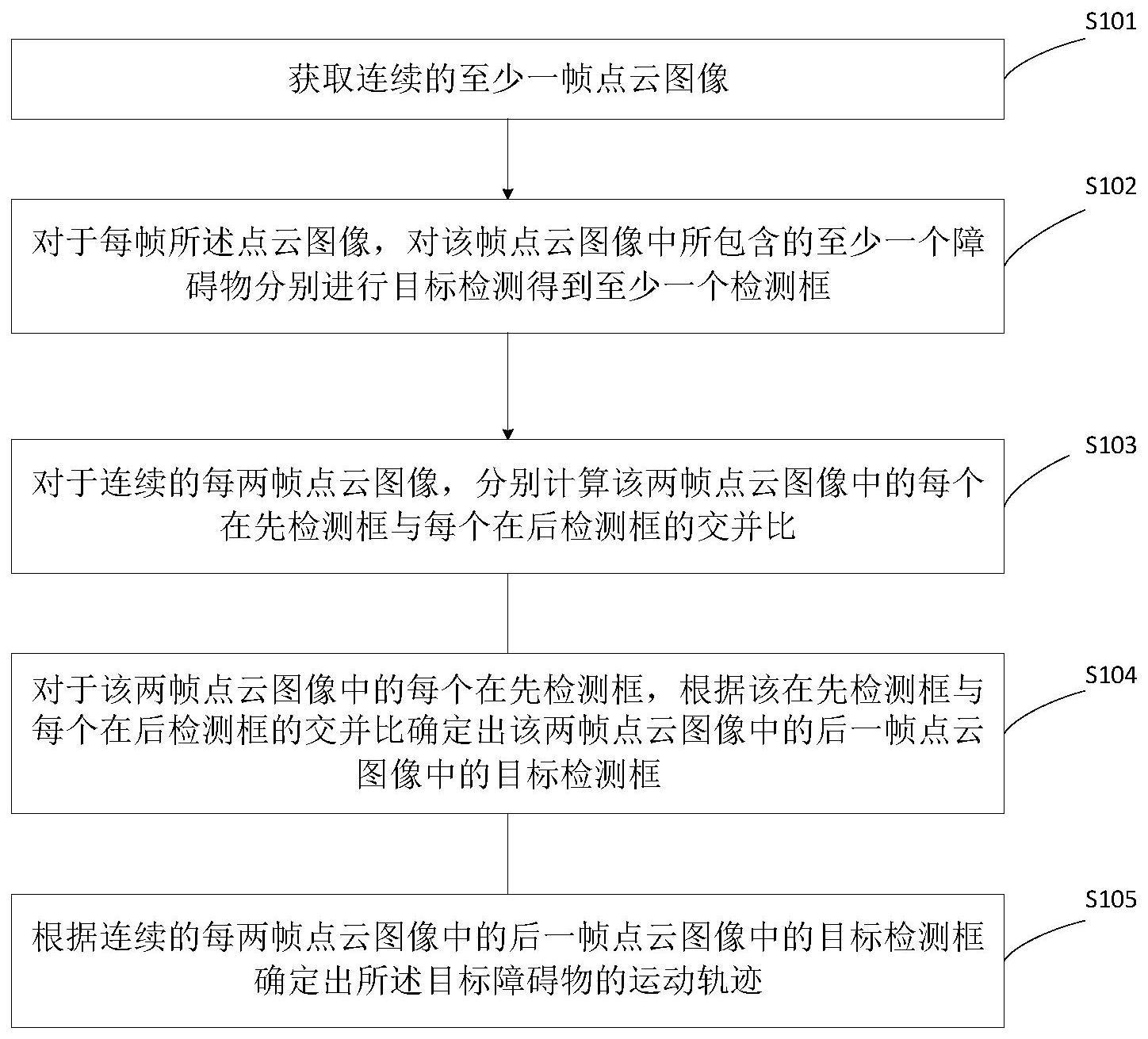
3、获取连续的至少一帧点云图像,其中,每帧点云图像中包含至少一个障碍物;
4、对于每帧所述点云图像,对该帧点云图像中所包含的至少一个障碍物分别进行目标检测得到至少一个检测框,其中,每个检测框中包含一个障碍物;
5、对于连续的每两帧点云图像,分别计算该两帧点云图像中的每个在先检测框与每个在后检测框的交并比,其中,所述在先检测框为该两帧点云图像中的前一帧点云图像中的检测框,所述在后检测框为该两帧点云图像中的后一帧点云图像中的检测框;
6、对于该两帧点云图像中的每个在先检测框,根据该在先检测框与每个在后检测框的交并比确定出该两帧点云图像中的后一帧点云图像中的目标检测框,其中,所述目标检测框为包含目标障碍物的检测框,所述目标障碍物为该在先检测框所包含的障碍物;
7、根据连续的每两帧点云图像中的后一帧点云图像中的目标检测框确定出所述目标障碍物的运动轨迹。
8、可选地,所述对于每帧所述点云图像,对该帧点云图像中所包含的至少一个障碍物分别进行目标检测得到至少一个检测框,包括:
9、对于每帧所述点云图像,将该帧点云图像输入至点云目标检测模型中对该帧点云图像所包含的至少一个障碍物分别进行目标检测得到至少一个检测框。
10、可选地,所述对于该两帧点云图像中的每个在先检测框,根据该在先检测框与每个在后检测框的交并比确定出该两帧点云图像中的后一帧点云图像中的目标检测框,包括:
11、对于该两帧点云图像中的每个在先检测框,判断该在先检测框的最大交并比是否超过为所述目标障碍物预先配置的交并比阈值,其中,该在先检测框的最大交并比为该在先检测框分别与每个在后检测框之间的交并比中的最大值;
12、若该在先检测框的最大交并比超过为所述目标障碍物预先配置的交并比阈值,则将与该在先检测框具有所述最大交并比的在后检测框确定为所述目标检测框。
13、可选地,在对于该两帧点云图像中的每个在先检测框,判断该在先检测框的最大交并比是否超过为所述目标障碍物预先配置的交并比阈值后,所述方法还包括:
14、若该在先检测框的最大交并比未超过为所述目标障碍物预先配置的交并比阈值,则判断该在先检测框的最近中心点距离是否超过为所述目标障碍物预先配置的中心点距离阈值,其中,该在先检测框的最近中心点距离为该在先检测框的中心点分别与每个在后检测框的中心点之间的距离中的最小值;
15、若该在先检测框的最近中心点距离未超过为所述目标障碍物预先配置的中心点距离阈值,则将所具有的中心点与该在先检测框的中心点之间的距离满足所述最近中心点距离的在后检测框确定为所述目标检测框。
16、可选地,在若该在先检测框的最大交并比未超过为所述目标障碍物预先配置的交并比阈值,则判断该在先检测框的最近中心点距离是否超过为所述目标障碍物预先配置的中心点距离阈值后,所述方法还包括:
17、若该在先检测框的最近中心点距离超过为所述目标障碍物预先配置的中心点距离阈值,则判断与该在先检测框具有所述最大交并比的在后检测框与所具有的中心点与该在先检测框的中心点之间的距离满足所述最近中心点距离的在后检测框是否为同一个检测框;
18、若与该在先检测框具有所述最大交并比的在后检测框与所具有的中心点与该在先检测框的中心点之间的距离满足所述最近中心点距离的在后检测框为同一个检测框,则将与该在先检测框具有所述最大交并比的在后检测框确定为所述目标检测框。
19、可选地,在若该在先检测框的最近中心点距离超过为所述目标障碍物预先配置的中心点距离阈值,则判断与该在先检测框具有所述最大交并比的在后检测框与所具有的中心点与该在先检测框的中心点之间的距离满足所述最近中心点距离的在后检测框是否为同一个检测框后,所述方法还包括:
20、若与该在先检测框具有所述最大交并比的在后检测框与所具有的中心点与该在先检测框的中心点之间的距离满足所述最近中心点距离的在后检测框不是同一个检测框,则将所具有的中心点与该在先检测框的中心点之间的距离未超过预设偏差值的在后检测框确定为所述目标检测框。
21、可选地,所述根据连续的每两帧点云图像中的后一帧点云图像中的目标检测框确定出所述目标障碍物的运动轨迹,包括:
22、对连续的每两帧点云图像中的后一帧点云图像中的目标检测框的中心点进行曲线拟合得到所述目标障碍物的运动轨迹。
23、第二方面,本技术实施例提供了一种障碍物运动轨迹确定装置,所述装置包括:
24、点云图像获取模块,用于获取连续的至少一帧点云图像,其中,每帧点云图像中包含至少一个障碍物;
25、检测框确定模块,用于对于每帧所述点云图像,对该帧点云图像中所包含的至少一个障碍物分别进行目标检测得到至少一个检测框,其中,每个检测框中包含一个障碍物;
26、交并比确定模块,用于对于连续的每两帧点云图像,分别计算该两帧点云图像中的每个在先检测框与每个在后检测框的交并比,其中,所述在先检测框为该两帧点云图像中的前一帧点云图像中的检测框,所述在后检测框为该两帧点云图像中的后一帧点云图像中的检测框;
27、目标检测框确定模块,用于对于该两帧点云图像中的每个在先检测框,根据该在先检测框与每个在后检测框的交并比确定出该两帧点云图像中的后一帧点云图像中的目标检测框,其中,所述目标检测框为包含目标障碍物的检测框,所述目标障碍物为该在先检测框所包含的障碍物;
28、运动轨迹确定模块,用于根据连续的每两帧点云图像中的后一帧点云图像中的目标检测框确定出所述目标障碍物的运动轨迹。
29、可选地,所述检测框确定模块在用于对于每帧所述点云图像,对该帧点云图像中所包含的至少一个障碍物分别进行目标检测得到至少一个检测框时,具体用于:
30、对于每帧所述点云图像,将该帧点云图像输入至点云目标检测模型中对该帧点云图像所包含的至少一个障碍物分别进行目标检测得到至少一个检测框。
31、可选地,所述目标检测框确定模块在用于对于该两帧点云图像中的每个在先检测框,根据该在先检测框与每个在后检测框的交并比确定出该两帧点云图像中的后一帧点云图像中的目标检测框时,具体用于:
32、对于该两帧点云图像中的每个在先检测框,判断该在先检测框的最大交并比是否超过为所述目标障碍物预先配置的交并比阈值,其中,该在先检测框的最大交并比为该在先检测框分别与每个在后检测框之间的交并比中的最大值;
33、若该在先检测框的最大交并比超过为所述目标障碍物预先配置的交并比阈值,则将与该在先检测框具有所述最大交并比的在后检测框确定为所述目标检测框。
34、可选地,所述目标检测框确定模块在用于对于该两帧点云图像中的每个在先检测框,判断该在先检测框的最大交并比是否超过为所述目标障碍物预先配置的交并比阈值后,还用于:
35、若该在先检测框的最大交并比未超过为所述目标障碍物预先配置的交并比阈值,则判断该在先检测框的最近中心点距离是否超过为所述目标障碍物预先配置的中心点距离阈值,其中,该在先检测框的最近中心点距离为该在先检测框的中心点分别与每个在后检测框的中心点之间的距离中的最小值;
36、若该在先检测框的最近中心点距离未超过为所述目标障碍物预先配置的中心点距离阈值,则将所具有的中心点与该在先检测框的中心点之间的距离满足所述最近中心点距离的在后检测框确定为所述目标检测框。
37、可选地,所述目标检测框确定模块在用于若该在先检测框的最大交并比未超过为所述目标障碍物预先配置的交并比阈值,则判断该在先检测框的最近中心点距离是否超过为所述目标障碍物预先配置的中心点距离阈值后,还用于:
38、若该在先检测框的最近中心点距离超过为所述目标障碍物预先配置的中心点距离阈值,则判断与该在先检测框具有所述最大交并比的在后检测框与所具有的中心点与该在先检测框的中心点之间的距离满足所述最近中心点距离的在后检测框是否为同一个检测框;
39、若与该在先检测框具有所述最大交并比的在后检测框与所具有的中心点与该在先检测框的中心点之间的距离满足所述最近中心点距离的在后检测框为同一个检测框,则将与该在先检测框具有所述最大交并比的在后检测框确定为所述目标检测框。
40、可选地,所述目标检测框确定模块在用于若该在先检测框的最近中心点距离超过为所述目标障碍物预先配置的中心点距离阈值,则判断与该在先检测框具有所述最大交并比的在后检测框与所具有的中心点与该在先检测框的中心点之间的距离满足所述最近中心点距离的在后检测框是否为同一个检测框后,还用于:
41、若与该在先检测框具有所述最大交并比的在后检测框与所具有的中心点与该在先检测框的中心点之间的距离满足所述最近中心点距离的在后检测框不是同一个检测框,则将所具有的中心点与该在先检测框的中心点之间的距离未超过预设偏差值的在后检测框确定为所述目标检测框。
42、可选地,所述运动轨迹确定模块在用于根据连续的每两帧点云图像中的后一帧点云图像中的目标检测框确定出所述目标障碍物的运动轨迹时,具体用于:
43、对连续的每两帧点云图像中的后一帧点云图像中的目标检测框的中心点进行曲线拟合得到所述目标障碍物的运动轨迹。
44、第三方面,本技术实施例提供了一种计算机设备,包括:处理器、存储器和总线,所述存储器存储有所述处理器可执行的机器可读指令,当计算机设备运行时,所述处理器与所述存储器之间通过总线通信,所述机器可读指令被所述处理器执行时执行上述第一方面中任一种可选地实施方式中所述的障碍物运动轨迹确定方法的步骤。
45、第四方面,本技术实施例提供了一种计算机可读存储介质,该计算机可读存储介质上存储有计算机程序,该计算机程序被处理器运行时执行上述第一方面中任一种可选地实施方式中所述的障碍物运动轨迹确定方法的步骤。
46、本技术提供的技术方案包括但不限于以下有益效果:
47、获取连续的至少一帧点云图像,其中,每帧点云图像中包含至少一个障碍物;对于每帧所述点云图像,对该帧点云图像中所包含的至少一个障碍物分别进行目标检测得到至少一个检测框,其中,每个检测框中包含一个障碍物;通过上述步骤,能够得到包含点云图像中所包含的每个障碍物的检测框。
48、对于连续的每两帧点云图像,分别计算该两帧点云图像中的每个在先检测框与每个在后检测框的交并比,其中,所述在先检测框为该两帧点云图像中的前一帧点云图像中的检测框,所述在后检测框为该两帧点云图像中的后一帧点云图像中的检测框;对于该两帧点云图像中的每个在先检测框,根据该在先检测框与每个在后检测框的交并比确定出该两帧点云图像中的后一帧点云图像中的目标检测框,其中,所述目标检测框为包含目标障碍物的检测框,所述目标障碍物为该在先检测框所包含的障碍物;通过上述步骤,能够根据每两帧连续的点云图像中所包含的检测框之间的交并比确定出每帧点云图像中包含目标障碍物的目标检测框。
49、根据连续的每两帧点云图像中的后一帧点云图像中的目标检测框确定出所述目标障碍物的运动轨迹;通过上述步骤,能够根据每帧点云图像中包含目标障碍物的目标检测框确定出所述目标障碍物的运动轨迹。
50、采用上述方法,通过对点云图像中所包含的障碍物进行目标检测得到多个检测框,然后将每两帧连续的点云图像中所包含的检测框进行交并比计算,根据计算得到的交并比确定出每帧点云图像中的包含目标障碍物的目标检测框,然后再根据每帧点云图像中包含目标障碍物的目标检测框确定出所述目标障碍物的运动轨迹,以提高确定得到的障碍物运动轨迹的准确性。
51、为使本发明的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
- 还没有人留言评论。精彩留言会获得点赞!