一种基于社区安全隐患的物业智能巡检方法与流程
本发明涉及智能巡检,尤其涉及一种基于社区安全隐患的物业智能巡检方法。
背景技术:
1、社区由生活在一起的社会群体所处的生活区域,社区物业是对社区内的房产建筑进行管理、维护以及服务的组织和机构,在社区物业的工作中,物业需要定期对社区进行安全巡检,发现社区潜在的安全隐患,保护社区居民的生命财产安全。
2、现有的社区安全巡检技术多为基于人工的安全巡检技术,通过安排社区工作人员在固定时间段对社区内的建筑墙面、路灯以及气水管道等公共设施进行安全检查,并记录检查结果,实际应用中,基于人工的安全巡检技术需要工作人员长期重复性的进行巡检工作,对工作人员的体力、视力以及判断力有较高要求,可能会导致进行社区安全巡检时的效率较低。
技术实现思路
1、本发明提供一种基于社区安全隐患的物业智能巡检方法和装置,其主要目的在于解决进行社区安全巡检时的效率较低的问题。
2、为实现上述目的,本发明提供的一种基于社区安全隐患的物业智能巡检方法,包括:
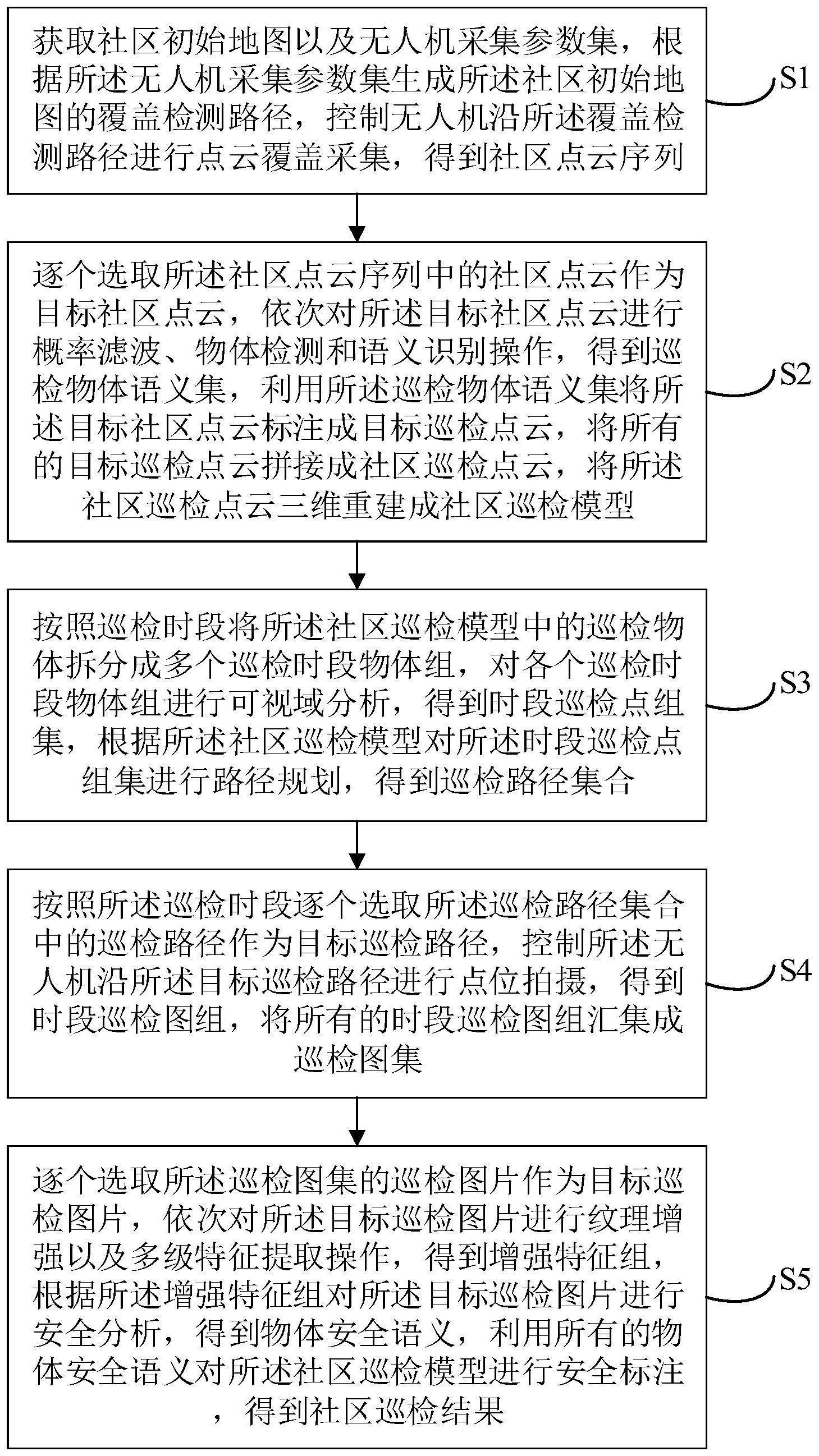
3、获取社区初始地图以及无人机采集参数集,根据所述无人机采集参数集生成所述社区初始地图的覆盖检测路径,控制无人机沿所述覆盖检测路径进行点云覆盖采集,得到社区点云序列;
4、逐个选取所述社区点云序列中的社区点云作为目标社区点云,依次对所述目标社区点云进行概率滤波、物体检测和语义识别操作,得到巡检物体语义集,利用所述巡检物体语义集将所述目标社区点云标注成目标巡检点云,将所有的目标巡检点云拼接成社区巡检点云,将所述社区巡检点云三维重建成社区巡检模型;
5、按照巡检时段将所述社区巡检模型中的巡检物体拆分成多个巡检时段物体组,对各个巡检时段物体组进行可视域分析,得到时段巡检点组集,根据所述社区巡检模型对所述时段巡检点组集进行路径规划,得到巡检路径集合,其中,所述对各个巡检时段物体组进行可视域分析,得到时段巡检点组集,包括:逐个选取所述巡检时段物体组作为目标巡检物体组,逐个选取所述目标巡检物体组中的巡检物体作为目标巡检物体;根据所述无人机的焦距区间生成所述目标巡检物体的拍摄空间,逐个选取所述拍摄空间中的拍摄点位作为目标拍摄点位;利用如下的遮挡视域算法计算出所述目标拍摄点位的偏移遮挡系数:
6、
7、其中,oi是指所述目标拍摄点位i的偏移遮挡系数,m是指所述无人机的总拍摄的总像素数量,δ为遮挡权重,j是指所述无人机拍摄像素序号,vi,j是指由所述目标拍摄点位i出发到所述目标巡检物体的表面的所有像素射线中的第j个像素射线的单位向量,·为向量点积符号,pi,j是指由所述目标拍摄点位i出发到所述目标巡检物体的表面的所有像素射线中的第j个像素射线的遮挡系数,||为向量取模符号,w是指所述目标巡检物体的内表面的法向量;选取所述偏移遮挡系数最小的目标拍摄点位作为所述目标巡检物体的巡检点,将所述目标巡检物体组对应的所有巡检点汇集成时段巡检点组,将所有的时段巡检点组汇集成时段巡检点组集;
8、按照所述巡检时段逐个选取所述巡检路径集合中的巡检路径作为目标巡检路径,控制所述无人机沿所述目标巡检路径进行点位拍摄,得到时段巡检图组,将所有的时段巡检图组汇集成巡检图集;
9、逐个选取所述巡检图集的巡检图片作为目标巡检图片,依次对所述目标巡检图片进行纹理增强以及多级特征提取操作,得到增强特征组,根据所述增强特征组对所述目标巡检图片进行安全分析,得到物体安全语义,利用所有的物体安全语义对所述社区巡检模型进行安全标注,得到社区巡检结果。
10、可选地,所述根据所述无人机采集参数集生成所述社区初始地图的覆盖检测路径,包括:
11、利用如下的覆盖投影算法根据所述无人机采集参数集计算出采集长度以及采集宽度:
12、
13、
14、其中,r1是指所述采集宽度,r2是指所述采集长度,ceiling是向上取整符号,θ是所述无人机采集参数集中的纵向点云采集角度,α是指所述无人机采集参数集中的滚转角,β是指所述无人机采集参数集中的横向点云采集角度,d是指所述无人机采集参数集中的飞行高度;
15、根据所述采集长度以及所述采集宽度生成采集区块;
16、按照预设的重叠步长和所述采集区块对所述社区初始地图进行覆盖扫描,得到覆盖检测路径。
17、可选地,所述依次对所述目标社区点云进行概率滤波、物体检测和语义识别操作,得到巡检物体语义集,包括:
18、利用预设的高斯密度算法对所述目标社区点云进行概率滤波,得到目标滤波点云;
19、依次对所述目标滤波点云进行物体检测和物体分割操作,得到物体点云集;
20、逐个对所述物体点云集中的物体点云进行语义识别操作,得到巡检物体语义集。
21、可选地,所述利用预设的高斯密度算法对所述目标社区点云进行概率滤波,得到目标滤波点云,包括:
22、对所述目标社区点云进行中值滤波,得到目标去噪点云;
23、对所述目标去噪点云进行几何特征提取,得到点云几何特征集;
24、利用预设的高斯密度算法根据所述点云几何特征集计算出所述目标去噪点云中每个点云的点云概率:
25、
26、其中,n(x)是指所述目标去噪点云中的点云x的点云概率,π是圆周率,n是所述点云几何特征集中每个点云几何特征的特征维度,det()为行列式符号,σx是所述点云几何特征集中点云x的点云几何特征的高斯协方差矩阵,exp为指数函数符号,μx是指所述点云几何特征集中点云x的点云几何特征的高斯均值向量,t是转置符号;
27、根据所述点云概率对所述目标去噪点云进行概率阈值滤波,得到目标滤波点云。
28、可选地,所述将所述社区巡检点云三维重建成社区巡检模型,包括:
29、将所述社区巡检点云三角化成三角社区模型;
30、从所述三角社区模型中提取出三角顶点集和三角面集,对所述三角顶点集和所述三角面集进行匹配重组,得到三角信息集;
31、根据所述三角信息集计算出所述三角社区模型中每个三角面的重构三角顶点;
32、根据所述重构三角顶点对所述三角社区模型进行三角重构,得到重构社区模型;
33、对所述重构社区模型进行表面平滑操作,得到社区巡检模型。
34、可选地,所述根据所述社区巡检模型对所述时段巡检点组集进行路径规划,得到巡检路径集合,包括:
35、逐个选取所述时段巡检点组集中的时段巡检点组作为目标巡检点组,根据所述无人机的库存坐标生成所述目标巡检点组的开始巡检点以及结束巡检点;
36、计算出所述目标巡检点组中的各个巡检点与所述库存坐标之间的库存距离;
37、根据所述库存距离的由小到大的顺序对所述目标巡检点组中的各巡检点进行排序,得到初始巡检点序列;
38、将所述开始巡检点插入所述初始巡检点的首部,将所述结束巡检点插入所述初始巡检点序列的尾部,得到目标巡检点序列;
39、根据所述社区巡检模型对所述目标巡检点序列进行路径规划,得到初始巡检路径;
40、对所述初始巡检路径进行路径优化,得到目标巡检路径,并将所有的目标巡检路径汇集成巡检路径集合。
41、可选地,所述依次对所述目标巡检图片进行纹理增强以及多级特征提取操作,得到增强特征组,包括:
42、对所述目标巡检图片进行高斯滤波,得到目标滤波图片;
43、对所述目标滤波图片进行纹理侵蚀操作,得到目标巡检纹理,利用所述目标巡检纹理对所述目标滤波图片进行图像分割操作,得到目标纹理图片;
44、生成所述目标纹理图片的灰度直方图,利用所述灰度直方图对所述目标纹理图片进行灰度增强,得到目标增强图片;
45、分别提取出所述目标增强图片的纹理特征、色彩特征以及形状特征,将所述纹理特征、所述色彩特征以及所述形状特征汇集成增强特征组。
46、可选地,所述根据所述增强特征组对所述目标巡检图片进行安全分析,得到物体安全语义,包括:
47、利用预设的注意力融合算法将所述增强特征组融合成目标巡检特征;
48、将所述目标巡检图片对应的巡检物体语义作为目标物体语义,从预设的安全识别模型库中选取出所述目标物体语义对应的物体安全模型作为目标物体安全模型;
49、利用所述目标物体安全模型对所述目标巡检特征进行归一化操作,得到目标安全编码,将所述目标安全编码所处的区间语义作为所述目标巡检图片的物体安全语义。
50、可选地,所述利用预设的注意力融合算法将所述增强特征组融合成目标巡检特征,包括:
51、对所述增强特征组中的纹理特征进行全局降维操作,得到标准纹理特征;
52、对所述增强特征组中的色彩特征进行全局降维操作,得到标准色彩特征;
53、对所述增强特征组中的形状特征进行全局降维操作,得到标准形状特征;
54、利用如下的注意力融合算法将所述标准纹理特征、所述标准色彩特征以及所述标准形状特征融合成目标巡检特征:
55、
56、其中,a是指所述目标巡检特征,softmax为归一化函数,ω、σ是所述注意力融合算法的融合权重矩阵,q是所述标准纹理特征,k是所述标准色彩特征,t是转置符号,f是特征维度,且所述标准纹理特征、所述标准色彩特征以及所述标准形状特征的特征维度相等,v是指所述标准形状特征。
57、为了解决上述问题,本发明还提供一种基于社区安全隐患的物业智能巡检装置,所述装置包括:
58、点云采集模块,用于获取社区初始地图以及无人机采集参数集,根据所述无人机采集参数集生成所述社区初始地图的覆盖检测路径,控制无人机沿所述覆盖检测路径进行点云覆盖采集,得到社区点云序列;
59、三维重建模块,用于逐个选取所述社区点云序列中的社区点云作为目标社区点云,依次对所述目标社区点云进行概率滤波、物体检测和语义识别操作,得到巡检物体语义集,利用所述巡检物体语义集将所述目标社区点云标注成目标巡检点云,将所有的目标巡检点云拼接成社区巡检点云,将所述社区巡检点云三维重建成社区巡检模型;
60、路径规划模块,用于按照巡检时段将所述社区巡检模型中的巡检物体拆分成多个巡检时段物体组,对各个巡检时段物体组进行可视域分析,得到时段巡检点组集,根据所述社区巡检模型对所述时段巡检点组集进行路径规划,得到巡检路径集合,其中,所述对各个巡检时段物体组进行可视域分析,得到时段巡检点组集,包括:逐个选取所述巡检时段物体组作为目标巡检物体组,逐个选取所述目标巡检物体组中的巡检物体作为目标巡检物体;根据所述无人机的焦距区间生成所述目标巡检物体的拍摄空间,逐个选取所述拍摄空间中的拍摄点位作为目标拍摄点位;利用如下的遮挡视域算法计算出所述目标拍摄点位的偏移遮挡系数:
61、
62、其中,oi是指所述目标拍摄点位i的偏移遮挡系数,m是指所述无人机的总拍摄的总像素数量,δ为遮挡权重,j是指所述无人机拍摄像素序号,vi,j是指由所述目标拍摄点位i出发到所述目标巡检物体的表面的所有像素射线中的第j个像素射线的单位向量,·为向量点积符号,pi,j是指由所述目标拍摄点位i出发到所述目标巡检物体的表面的所有像素射线中的第j个像素射线的遮挡系数,||为向量取模符号,w是指所述目标巡检物体的内表面的法向量;选取所述偏移遮挡系数最小的目标拍摄点位作为所述目标巡检物体的巡检点,将所述目标巡检物体组对应的所有巡检点汇集成时段巡检点组,将所有的时段巡检点组汇集成时段巡检点组集;
63、巡检拍摄模块,用于按照所述巡检时段逐个选取所述巡检路径集合中的巡检路径作为目标巡检路径,控制所述无人机沿所述目标巡检路径进行点位拍摄,得到时段巡检图组,将所有的时段巡检图组汇集成巡检图集;
64、语义分析模块,用于逐个选取所述巡检图集的巡检图片作为目标巡检图片,依次对所述目标巡检图片进行纹理增强以及多级特征提取操作,得到增强特征组,根据所述增强特征组对所述目标巡检图片进行安全分析,得到物体安全语义,利用所有的物体安全语义对所述社区巡检模型进行安全标注,得到社区巡检结果。
65、本发明实施例通过获取社区初始地图以及无人机采集参数集,根据所述无人机采集参数集生成所述社区初始地图的覆盖检测路径,控制无人机沿所述覆盖检测路径进行点云覆盖采集,得到社区点云序列,可以利用无人机载点云扫描仪获取社区的全局点云序列,从而方便后续的路径规划以及智能巡检,通过逐个选取所述社区点云序列中的社区点云作为目标社区点云,依次对所述目标社区点云进行概率滤波、物体检测和语义识别操作,得到巡检物体语义集,可以增强点云的细节,并对所述目标社区点云中需要进行安全巡检的物体标注,通过利用所述巡检物体语义集将所述目标社区点云标注成目标巡检点云,将所有的目标巡检点云拼接成社区巡检点云,将所述社区巡检点云三维重建成社区巡检模型,可以重建待安全巡检的社区的三维模型,方便后续针对每个需要进行安全巡检的物体进行障碍物的躲避和路径规划,通过按照巡检时段将所述社区巡检模型中的巡检物体拆分成多个巡检时段物体组,对各个巡检时段物体组进行可视域分析,得到时段巡检点组集,可以为每个巡检物体选取出最为合适的拍摄点位,得到质量更好地时段巡检图集,通过根据所述社区巡检模型对所述时段巡检点组集进行路径规划,得到巡检路径集合,可以生成经过所有的拍摄点位且可以自动归位的拍摄路径,从而一次性对巡检时段中的巡检物体进行拍摄,提高巡检速度。
66、通过按照所述巡检时段逐个选取所述巡检路径集合中的巡检路径作为目标巡检路径,控制所述无人机沿所述目标巡检路径进行点位拍摄,得到时段巡检图组,将所有的时段巡检图组汇集成巡检图集,可以在每个待巡检物体最容易被观测到状态的时段进行拍摄采样,从而提高了智能巡检的精确度,通过逐个选取所述巡检图集的巡检图片作为目标巡检图片,依次对所述目标巡检图片进行纹理增强以及多级特征提取操作,得到增强特征组,根据所述增强特征组对所述目标巡检图片进行安全分析,得到物体安全语义,利用所有的物体安全语义对所述社区巡检模型进行安全标注,得到社区巡检结果,可以根据每种巡检物体的多个特征实现安全分析,提高了安全分析的准确度,进而提高了社区安全巡检的效率。因此本发明提出的基于社区安全隐患的物业智能巡检方法和装置,可以解决进行社区安全巡检时的效率较低的问题。
- 还没有人留言评论。精彩留言会获得点赞!