钢轨轨面掉块检测方法及设备与流程
本发明属于轨道检测,具体涉及一种钢轨轨面掉块检测方法及设备。
背景技术:
1、轨道经过一段时间的运行之后,钢轨会出现各类型的伤损,其中,钢轨轨面的剥落掉块是较为常见的一种伤损,当轨面掉块较为严重时,将会影响乘客的乘车体验甚至列车的运行安全,并且轨面掉块也可能指示进一步的其他问题,例如钢轨本身材质的问题、轨道线路曲线半径小、行车频次过高、轨道几何形位有偏差等,因此,很有必要对轨面掉块进行检测以及进一步分析。
2、目前在实际应用中,主要是人工采用相应检测工具来对轨面掉块的位置及尺寸进行测量,效率较低,且由于轨面掉块具有随机分布、大小不一、分布不连续的特点,人工检测方式容易出现遗漏。现有技术中虽然存在一些轨面掉块检测方法,但这些方法仍存在相应问题而难以实际推广应用:其中一些方法基于预定算法从相机采集的轨道图像中识别出掉块,但这样的方法无法提取掉块的深度,而掉块深度是其非常重要的指标;另一些方法对采集的钢轨轮廓数据进行分析,在检测到连续n帧数据超过掉块阈值时判定为掉块,基于这n帧数据计算掉块深度,这样虽然能获得掉块深度,但需要对采集的所有轮廓数据(例如整段钢轨轮廓的三维点云)进行分析,运算量非常大,掉块检测的结果有相当的滞后性,而现场检测的停线时间较为有限,因此这样的方法主要用于实验室的分析检测。
3、因此,为提高轨面掉块现场检测的自动化程度和效率,需要一种新的轨面掉块检测方法。
技术实现思路
1、本发明是为解决上述问题而进行的,目的在于提供一种能够能够准确全面地识别钢轨轨面上的掉块缺陷、提取其深度信息且运算量相对较小的钢轨轨面掉块检测方法,本发明采用了如下技术方案:
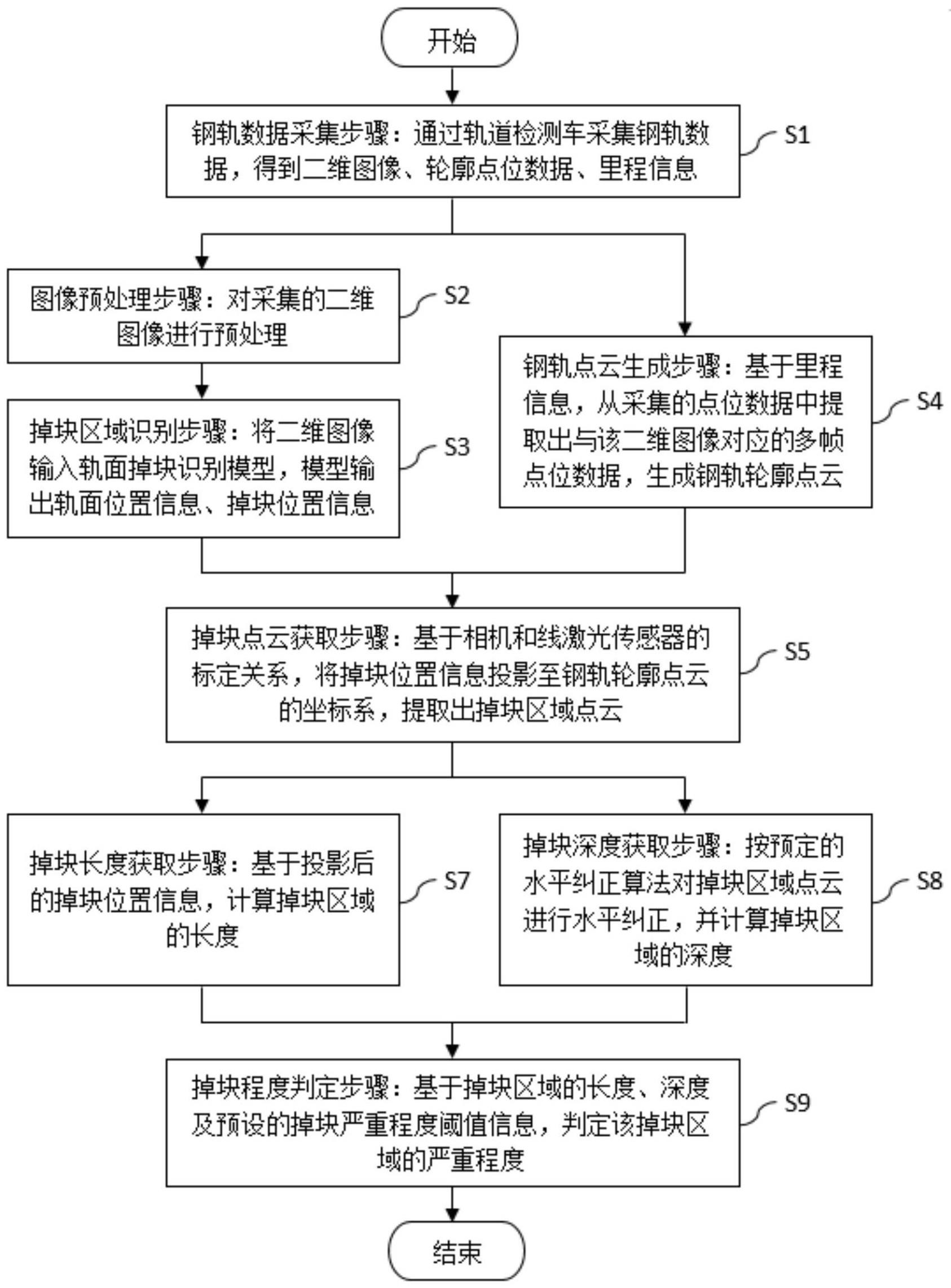
2、本发明提供了一种钢轨轨面掉块检测方法,其特征在于,基于相机采集的钢轨的轨面的二维图像、线激光传感器采集的所述钢轨的轮廓的点位数据以及对应的里程信息检测所述轨面上的掉块区域,该方法包括:掉块区域识别步骤:将所述二维图像输入轨面掉块识别模型,该模型输出掉块位置信息,其中,所述轨面掉块识别模型为训练好的神经网络模型;钢轨点云生成步骤:基于所述里程信息,从所述点位数据中提取出与所述二维图像对应的多帧点位数据,生成钢轨轮廓点云;掉块点云获取步骤:基于所述相机和所述线激光传感器的标定关系,将所述掉块位置信息投影至所述钢轨轮廓点云的坐标系,提取出所述掉块区域对应的掉块区域点云;掉块深度获取步骤:按预定的水平纠正算法对所述掉块区域点云进行水平纠正,并基于纠正后的所述掉块区域点云计算所述掉块区域的深度。
3、本发明提供的钢轨轨面掉块检测方法,还可以具有这样的技术特征,其中,所述掉块深度获取步骤包括:倾斜角计算子步骤:按预定的倾斜角算法,计算所述掉块区域点云的整体长度方向相对于y轴的倾斜角;水平纠正子步骤:基于所述倾斜角得到所述掉块区域点云沿y轴的旋转矩阵,并通过该旋转矩阵对所述掉块区域点云进行水平纠正;深度计算子步骤:遍历纠正后的所述掉块区域点云中的点,找出遍历的点的z轴坐标值中的最大值、最小值,并计算该最大值和该最小值的差值作为所述掉块区域的深度。
4、本发明提供的钢轨轨面掉块检测方法,还可以具有这样的技术特征,其中,所述倾斜角算法包括以下步骤:步骤1:在所述轨面点云数据中随机采样至少三个点作为初始点;步骤2:设平面模型的初始方程ax+by+cz+d=0,并基于多个所述初始点拟合所述平面模型,其中,a、b、c、d均为所述平面模型的参数;步骤3:在所述轨面点云数据的点中,选择除所述初始点以外的点,计算该点到所述平面模型的距离d:
5、
6、式中,x0、y0、z0为选择的点的坐标;步骤4:判断所述距离d是否小于预设的距离阈值,在判断为是时将该点加入内群;步骤5:计算所述内群中的点数占所述掉块区域点云的总点数的比例,并判断该比例是否大于预设的比例阈值;步骤6:在步骤5判断为是时,计算所述掉块区域点云相对于y轴的倾斜角θ:
7、
8、步骤7:在步骤5判断为否时,返回步骤3。
9、本发明提供的钢轨轨面掉块检测方法,还可以具有这样的技术特征,其中,所述水平纠正子步骤中,所述旋转矩阵为:
10、
11、根据以下公式对所述掉块区域点云praw进行水平纠正:
12、protate=ry(θ)praw。
13、本发明提供的钢轨轨面掉块检测方法,还可以具有这样的技术特征,其中,所述轨面掉块区域识别模型为改进的yolov5神经网络模型,其包括:backbone模块,用于提取所述二维图像的特征,其最后增设有上采样层;pan+bi-fpn模块,对提取出的所述特征进行融合,得到融合特征;以及head模块,基于所述融合特征,识别所述二维图像中的掉块区域以及轨面区域,并输出对应的掉块锚框的二维坐标及其第一置信度、以及轨面锚框的二维坐标及其第二置信度。
14、本发明提供的钢轨轨面掉块检测方法,还可以具有这样的技术特征,其中,所述掉块区域识别步骤还包括:从所有的所述掉块锚框中,去除所述第一置信度低于预设的置信度阈值的所述掉块锚框、以及位于所述轨面锚框外部的所述掉块锚框。
15、本发明提供的钢轨轨面掉块检测方法,还可以具有这样的技术特征,其中,所述掉块位置信息包括掉块锚框的二维坐标,所述掉块点云获取步骤包括:轨面点云提取子步骤:基于所述线激光传感器与所述轨面的距离,对所述钢轨轮廓点云进行裁剪,得到轨面点云;掉块坐标转换子步骤:基于相机内参将所述掉块锚框的二维坐标转换为相机坐标,并基于所述相机和所述线激光传感器的标定关系将所述相机坐标转换为世界坐标;掉块点云提取子步骤:基于所述掉块锚框的世界坐标,从所述轨面点云中提取出所述掉块区域对应的所述掉块区域点云。
16、本发明提供的钢轨轨面掉块检测方法,还可以具有这样的技术特征,在所述掉块点云提取步骤之后,还包括:掉块长度获取步骤:基于所述掉块锚框的世界坐标,计算所述掉块锚框的长度和宽度,并将计算得到的长度和宽度中的最大值作为所述掉块区域的长度;掉块程度判定步骤:基于所述掉块区域的长度和深度、以及预设的掉块严重程度阈值信息,判定所述掉块区域的严重程度。
17、本发明提供的钢轨轨面掉块检测方法,还可以具有这样的技术特征,其中,所述钢轨点云生成步骤包括:点位数据提取子步骤:基于二维图像所对应的所述里程信息,从所有的所述点位数据中提取出对应的多帧所述点位数据,所述点位数据为x-z轴的数据;点位数据堆叠子步骤:基于对应的所述里程信息,将提取出的多帧所述点位数据沿y轴方向堆叠;点云生成子步骤:将堆叠的多帧所述点位数据转换为所述钢轨轮廓点云。
18、本发明提供了一种钢轨轨面掉块检测设备,其特征在于,用于基于相机采集的钢轨的轨面的二维图像、线激光传感器采集的所述钢轨的轮廓的点位数据以及对应的里程信息检测所述轨面上的掉块区域,该设备包括:模型存储部,存储有轨面掉块识别模型,其为训练好的神经网络模型;掉块区域识别部,用于将所述二维图像输入所述轨面掉块识别模型,得到掉块位置信息;钢轨点云生成部,用于基于所述里程信息,从所述点位数据中提取出与所述二维图像对应的多帧点位数据,生成钢轨轮廓点云;掉块点云获取部,用于基于所述相机和所述线激光传感器的标定关系,将所述掉块位置信息投影至所述钢轨轮廓点云的坐标系,提取出所述掉块区域对应的掉块区域点云;以及掉块深度获取部,用于按预定的水平纠正算法对所述掉块区域点云进行水平纠正,并基于纠正后的所述掉块区域点云计算所述掉块区域的深度。
19、发明作用与效果
20、根据本发明的钢轨轨面掉块检测方法及设备,该方法包括掉块区域识别步骤、钢轨点云生成步骤、掉块点云获取步骤、掉块深度获取步骤,其中,通过训练完成的神经网络模型来识别相机采集的二维图像中的轨面掉块区域,对轨面掉块的识别全面快速且准确率高;基于识别出的掉块区域、相机和线激光传感器的标定关系,从线激光传感器采集的所有点位数据中提取并生成掉块区域点云来计算掉块深度,因此仅需要对相对少量的线激光传感器采集的数据进行分析处理,运算量少,能够很快输出检测出的掉块位置及其深度,有利于现场的检测分析;由于轨面整体不完全水平,采集生成的掉块区域的轨面点云也存在整体倾斜的情况,而本发明的方法中,对提取出的掉块区域点云进行了自适应的水平纠正,基于水平纠正后的掉块区域点云能够计算出准确的掉块深度。
21、如上所述,通过本发明的方法及设备,能够准确全面地识别钢轨轨面上的掉块缺陷、提取其深度信息且运算量较小,非常有利于轨道现场检测。
- 还没有人留言评论。精彩留言会获得点赞!