钢轨轨面光带检测方法及设备与流程
本发明属于轨道病害检测,具体涉及一种钢轨轨面光带检测方法及设备。
背景技术:
1、轨道经过一段时间的运行之后,由于车轮踏面在钢轨轨面的滚动、滑动以及车轮轮缘与钢轨作用边的相互作用,会在钢轨上留下亮痕,分别为顶面光带以及作用边擦痕。如果由于轨道不平顺,轮轨间的作用力和作用点发生改变,就会导致钢轨光带产生相对应的异常,包括光带宽度发生变化、宽度不均匀、光带位置偏移等。因此,很有必要对轨面上的光带进行检测以及进一步分析,从而及时发现各种类型的轨道不平顺的存在,保障列车安全平稳运行。
2、目前在实际应用中,主要是人工采用相应检测工具来对顶面光带的尺寸及偏移量进行测量,效率较低。现有技术中虽然存在一些轨面光带检测方法,但这些方法仍存在一些问题,而难以实际推广应用:其中一些方法通过训练好的神经网络模型等识别出轨道照片中的轨面光带,这样的方法只能从照片中识别出轨面光带,而难以得到光带的准确尺寸和位置信息;另一些方法通过将采集的图像数据投影至预设的标准轨道模型来获取光带的尺寸和位置信息,如cn107264570a所公开的方法,然而,钢轨可能不仅有光带异常,还有磨耗等其他缺陷,会影响投影匹配的精度,而导致难以得到准确的光带尺寸和位置信息,进而影响后续的进一步分析。
3、因此,为提高轨面光带检测的自动程度和效率,并能得到准确的光带尺寸及位置信息,需要一种新的轨面光带检测方法。
技术实现思路
1、本发明是为解决上述问题而进行的,目的在于提供一种能够准确全面地识别轨轨面上的光带异常、获取其尺寸及位置信息的钢轨轨面光带检测方法及设备,本发明采用了如下技术方案:
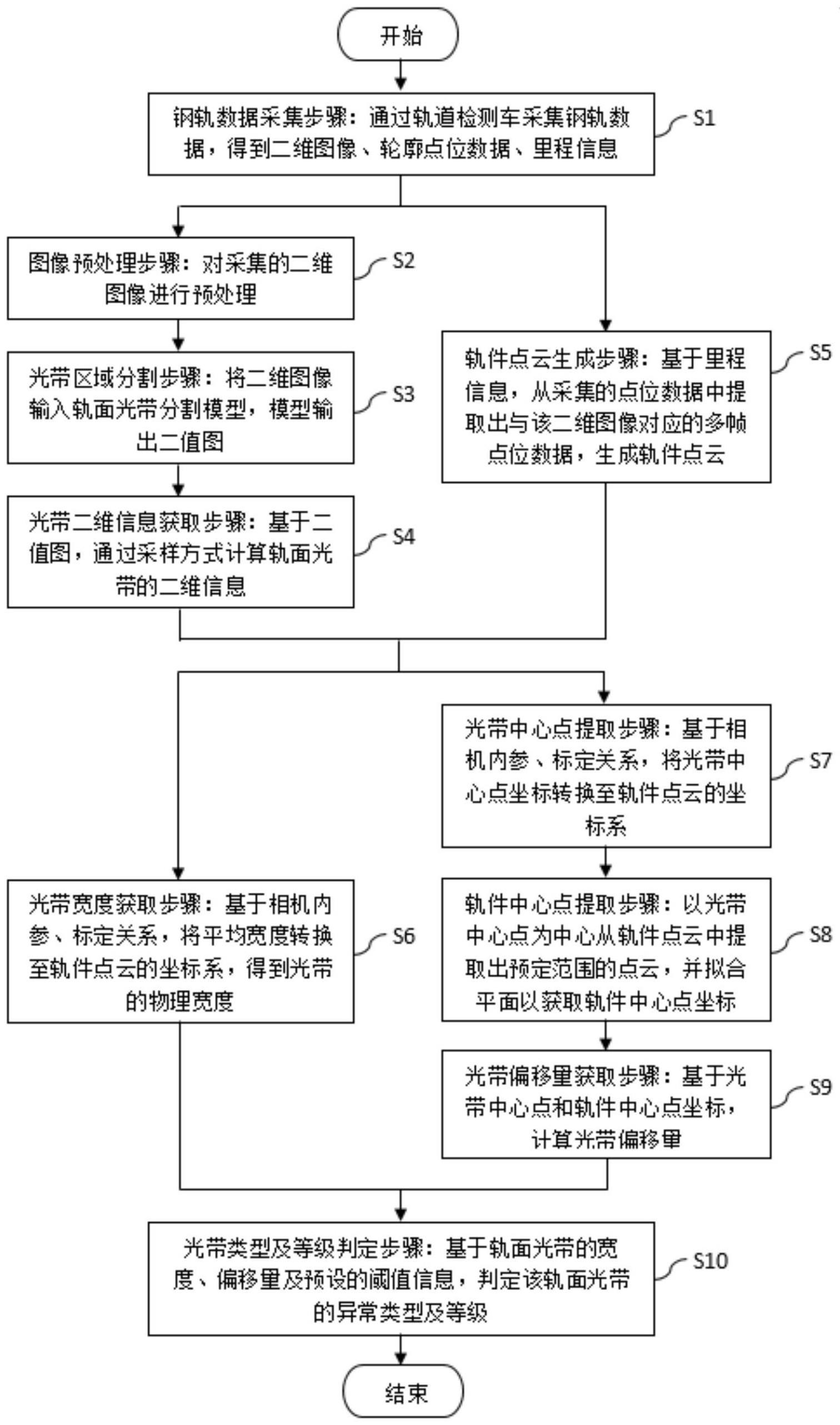
2、本发明提供了一种钢轨轨面光带检测方法,其特征在于,基于相机采集的钢轨的轨面的二维图像、线激光传感器采集的所述钢轨的轮廓点位数据以及对应的里程信息检测所述轨面上的轨面光带,该方法包括:光带区域分割步骤:将所述二维图像输入轨面光带分割模型,该模型输出分割出的所述轨面光带的形状及位置信息,其中,所述轨面光带分割模型为训练完成的语义分割模型;光带二维信息获取步骤:基于所述轨面光带的形状及位置信息,通过采样方式计算所述轨面光带的二维信息,包括光带中心点坐标;轨件点云生成步骤:基于所述里程信息,从采集的所述轮廓点位数据中提取出与所述二维图像对应的多帧所述轮廓点位数据,生成所述钢轨的轨件点云;轨件中心点提取步骤:以所述光带中心点为中心,从所述轨件点云中提取出预定范围的点云作为光带有效点云,并基于所述光带有效点云,通过拟合平面的方式获取所述钢轨的轨件中心点坐标;光带偏移量获取步骤:基于所述光带中心点以及所述轨件中心点,计算所述轨面光带的偏移量。
3、本发明提供的钢轨轨面光带检测方法,还可以具有这样的技术特征,其中,所述光带区域分割步骤包括:二值图生成子步骤,将所述二维图像输入所述轨面光带分割模型,该模型输出所述轨面光带的二值图;二值图转换子步骤,将所述二值图中光带区域的像素点转换为由拐点构成的多边形面;连通域填充子步骤,根据预定的孔洞填充算法,对所述多边形面的连通域中的孔洞进行填充,得到填充后的目标多边形面;误检滤除子步骤,判断所述目标多边形面的像素面积是否小于预定面积,将小于所述预定面积的所述目标多边形面作为误检进行滤除。
4、本发明提供的钢轨轨面光带检测方法,还可以具有这样的技术特征,其中,所述光带二维信息获取步骤包括:光带区域采样子步骤:在所述二值图中光带区域的长度方向的中部,以预定的采样间隔沿y轴进行预定次采样,得到多个光带区域采样;光带中心点计算子步骤:计算各个所述光带区域采样的两个端点的x轴坐标的差值,并计算多个所述差值的平均值,作为所述光带中心点的x轴坐标,将所述光带区域的长度方向的中点的y轴坐标作为所述光带中心点的y轴坐标。
5、本发明提供的钢轨轨面光带检测方法,还可以具有这样的技术特征,在所述轨件中心点提取步骤之前,还包括:光带中心点提取步骤:基于所述相机的相机内参、所述相机和所述线激光传感器的标定关系,将所述光带中心点坐标转换至所述轨件点云的坐标系,其中,所述光带偏移量获取步骤中,基于转换后的所述光带中心点坐标以及所述轨件中心点坐标,计算所述轨面光带相对于所述钢轨的中心轴线的偏移量。
6、本发明提供的钢轨轨面光带检测方法,还可以具有这样的技术特征,其中,所述轨件中心提取步骤包括:光带有效点云提取子步骤:基于转换后的所述光带中心点坐标以及所述里程信息,以所述光带中心点为中心,从所述轨件点云中裁剪出预定里程范围的点云作为所述光带有效点云;轨面拟合子步骤:基于所述光带有效点云,通过ransac算法拟合轨面平面;轨面最高点计算子步骤:计算所述轨面平面的中心点的坐标,作为轨面最高点的坐标;非作用边拟合子步骤:基于所述光带有效点云,通过所述ransac算法拟合非作用边平面;下颚点计算子步骤:基于所述轨面最高点的坐标以及所述非作用边平面,计算下颚点的坐标;轨件中心点计算子步骤:基于所述下颚点的坐标,计算所述轨件中心点的坐标。
7、本发明提供的钢轨轨面光带检测方法,还可以具有这样的技术特征,其中,所述ransac算法包括以下步骤:步骤1:在所述光带有效点云中框选出对应部分的部分点云;步骤2:在所述部分点云中,随机采样至少三个点作为初始点;步骤3:设平面模型的初始方程ax+by+cz+d=0,并基于多个所述初始点拟合平面模型,得到平面模型参数a、b、c、d的值;步骤4:在选出的部分点云的所有点中,选择除所述初始点之外的点,计算该点到平面模型的距离d1:
8、
9、式中,x0、y0、z0为选择的点的坐标;步骤5:判断所述距离d1是否小于预设的距离阈值,在判断为是时将该点加入内群;步骤6:计算所述内群中的点数占所述光带有效点云的总点数的比例,并判断该比例是否大于预设的比例阈值;步骤7:在步骤6判断为是时,基于所述内群中的点更新所述平面模型参数,得到更新的参数a、b、c、d;步骤8:基于更新的参数,计算所述部分点云的中心点处的z轴坐标作为所述轨面最高点的z轴坐标:
10、zmax=-(ax+by+d)/c。
11、本发明提供的钢轨轨面光带检测方法,还可以具有这样的技术特征,其中,所述下颚点计算子步骤中,所述下颚点的x轴坐标为:
12、zjaw=zmax-34
13、xjaw=-(by+czjaw+d)/a
14、式中,xjaw、zjaw分别为所述下颚点的x轴坐标、z轴坐标,所述轨件中心点计算子步骤中,两侧的所述钢轨的所述轨件中心点的坐标分别为:
15、xrail=xjaw-36.5
16、xrail′=xjaw+36.5
17、所述光带偏移量获取步骤中,两侧的所述钢轨的所述偏移量分别为:
18、offset=xlightband-xrail
19、offset′=xrail-xlightband
20、式中,xlightband为转换后的所述光带中心点的x轴坐标。
21、本发明提供的钢轨轨面光带检测方法,还可以具有这样的技术特征,其中,所述光带二维信息获取步骤中,在所述光带区域采样子步骤之后,还包括:平均宽度计算子步骤,计算各个所述光带区域采样的宽度,并计算多个所述宽度的平均宽度,在所述光带二维信息获取步骤之后,还包括:光带宽度获取步骤,基于所述相机的相机内参、所述相机和所述线激光传感器的标定关系,将所述平均宽度转换至所述轨件点云的坐标系,从而得到所述轨面光带的物理宽度。
22、本发明提供的钢轨轨面光带检测方法,还可以具有这样的技术特征,在所述光带宽度获取步骤和所述光带偏移量获取步骤之后,还包括:光带异常类型及等级判定步骤:基于所述轨面光带的所述物理宽度、所述偏移量以及预定的所述轨面光带的异常阈值信息,判定所述轨面光带的异常类型以及等级。
23、本发明提供了一种钢轨轨面光带检测设备,其特征在于,基于相机采集的钢轨的轨面的二维图像、线激光传感器采集的所述钢轨的轮廓点位数据以及对应的里程信息检测所述轨面上的光带区域,该设备包括:模型存储部,用于存储轨面光带分割模型,该模型为训练好的语义分割模型;光带区域识别部,用于将所述二维图像输入所述轨面光带分割模型,得到分割出的光带区域的形状及位置信息;光带二维信息获取部,用于基于所述轨面光带的形状及位置信息,通过采样方式计算所述轨面光带的二维信息,包括光带中心点坐标;轨件点云生成部,用于基于所述里程信息,从采集的所述轮廓点位数据中提取出与所述二维图像对应的多帧所述轮廓点位数据,生成所述钢轨的轨件点云;轨件中心点提取部:用于以所述光带中心点为中心,从所述轨件点云中提取出预定范围的点云作为光带有效点云,并基于所述光带有效点云,通过拟合平面的方式获取所述钢轨的轨件中心点坐标;以及光带偏移量获取部,用于基于所述光带中心点以及所述轨件中心点,计算所述轨面光带的偏移量。
24、发明作用与效果
25、根据本发明的钢轨轨面光带检测方法及设备,该方法包括光带区域识别步骤、光带二维信息获取步骤、轨件点云生成步骤、轨件中心点提取步骤、光带偏移量获取步骤,其中,通过训练完成的语义分割模型来识别分割出二维图像中的光带区域,对轨面光带的识别全面快速且准确率高;提取出对应于二维图像的部分轮廓点位数据生成轨件点云,并基于光带中心点进一步提取出光带中部小范围的点云作为光带有效点云用于进一步计算分析,因此仅需要对相对少量的线激光传感器采集的数据进行分析处理,运算量少,能够很快输出检测出的轨面光带及其偏移量,有利于现场的检测分析;现场的钢轨轨面不仅有光带,还可能存在其他类型的伤损情况,而本发明的方法中,基于提取出的光带有效点云通过拟合平面得到轨件中心点坐标,从而计算光带偏移量,通过拟合平面可有效排除一些其他类型的轨面伤损对光带偏移量计算的影响,从而得到准确的光带偏移量。如上所述,通过本发明的方法及设备,能够准确全面地识别钢轨轨面上的光带、计算其准确的偏移量且运算量较小,非常有利于轨道现场检测。
- 还没有人留言评论。精彩留言会获得点赞!