视觉循迹线的识别定位方法、装置、设备及介质与流程
本技术适用于人工智能,尤其涉及一种视觉循迹线的识别定位方法、装置、设备及介质。
背景技术:
1、随着数字化服务的发展,在医院中配置医疗机器人用于指引患者等进行就医,甚至能够帮助患者取药、排队等,这就需要医疗机器人具备准确地识别定位能力。
2、目前,对于医疗机器人循迹任务来说,设计者需要根据工作环境考虑不同的传感器来检测循迹线的位置,进而控制医疗机器人的运动方式。现有的常见检测方式为红外检测和视觉检测两种方式,红外检测方式简单灵敏,但是受光线颜色的影响很大,同时红外检测在水下无法使用,限制较多。基于视觉检测的方式需要进行算法设计,从图像中获取循迹线的相关信息,现有的方式将获取的循迹线拟合为图像中一条由斜率和截距决定的直线,这种方式在利用pid算法控制运动时也需要单独针对斜率和截距进行位置矫正,两者互相干扰造成运动不稳定的问题。因此,如何提高循迹线的识别准确率,以降低医疗机器人运动的控制难度成为亟待解决的问题。
技术实现思路
1、有鉴于此,本技术实施例提供了一种视觉循迹线的识别定位方法、装置、设备及介质,以解决如何提高循迹线的识别准确率,以降低医疗机器人运动的控制难度的问题。
2、第一方面,本技术实施例提供一种视觉循迹线的识别定位方法,所述识别定位方法包括:
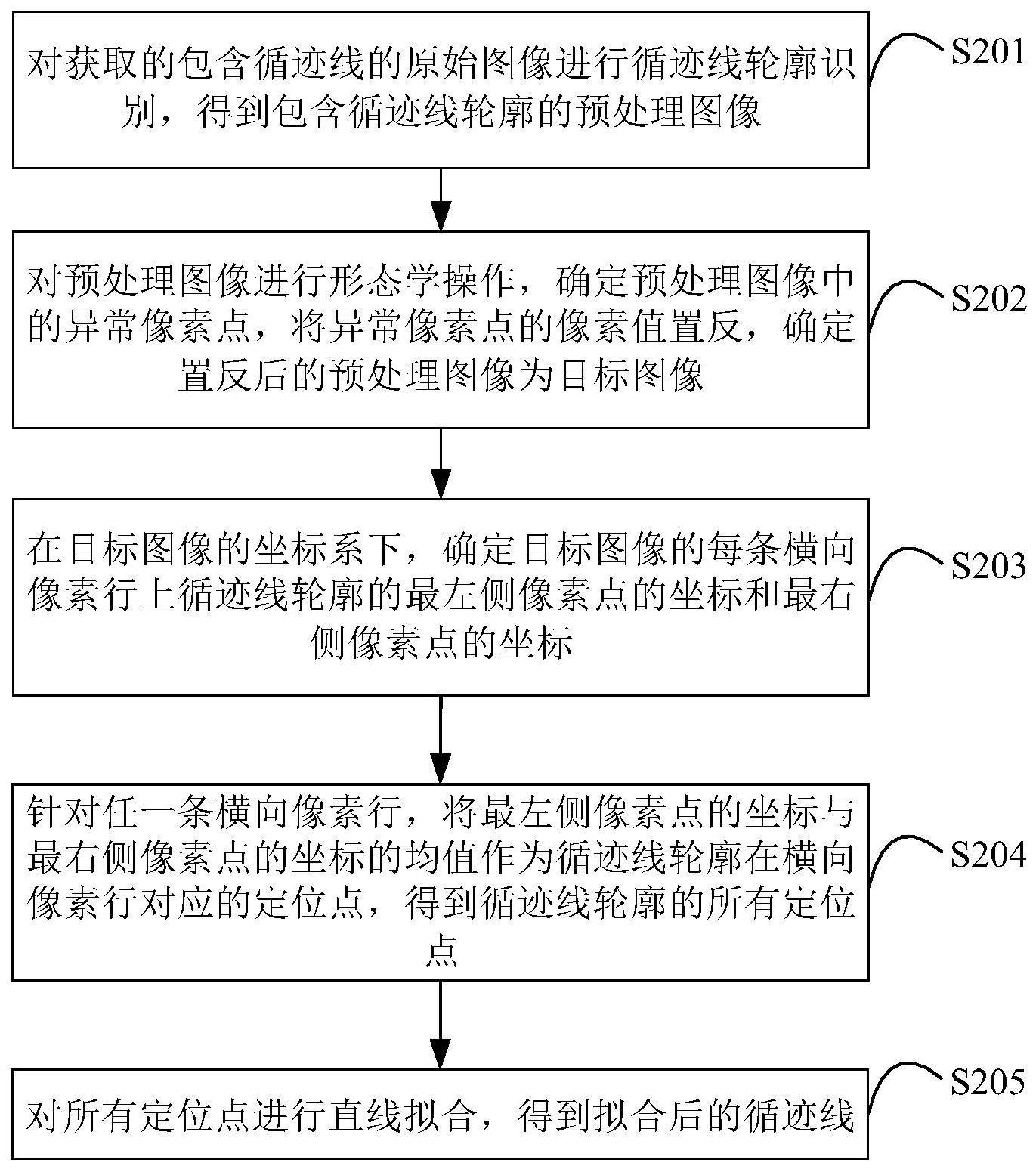
3、对获取的包含循迹线的原始图像进行循迹线轮廓识别,得到包含循迹线轮廓的预处理图像;
4、对所述预处理图像进行形态学操作,确定所述预处理图像中的异常像素点,将所述异常像素点的像素值置反,确定置反后的所述预处理图像为目标图像;
5、在所述目标图像的坐标系下,确定所述目标图像的每条横向像素行上所述循迹线轮廓的最左侧像素点的坐标和最右侧像素点的坐标;
6、针对任一条横向像素行,将所述最左侧像素点的坐标与所述最右侧像素点的坐标的均值作为所述循迹线轮廓在所述横向像素行对应的定位点,得到所述循迹线轮廓的所有定位点;
7、对所有定位点进行直线拟合,得到拟合后的循迹线,所述拟合后的循迹线用于指示医疗机器人的中心点沿所述拟合后的循迹线运动。
8、在一实施方式中,在对所有定位点进行直线拟合,得到拟合后的循迹线之后,还包括:
9、根据采集所述原始图像的采集设备在医疗机器人上的安装信息,确定所述医疗机器人的中心点与所述拟合后的循迹线的位置关系;
10、根据所述中心点与前轮驱动轴的中点的位置关系,以及所述中心点与后轮驱动轴的中点的位置关系,确定所述前轮驱动轴的中点和所述后轮驱动轴的中点分别与所述拟合后的循迹线的位置关系;
11、以所述前轮驱动轴的中点和所述后轮驱动轴的中点同时在所述拟合后的循迹线上为目标,控制所述医疗机器人前行时前后轮的转向角度。
12、在一实施方式中,对获取的包含循迹线的原始图像进行循迹线轮廓识别,得到包含循迹线轮廓的预处理图像包括:
13、对获取的包含循迹线的原始图像进行滤波,得到滤波后的原始图像;
14、对所述滤波后的原始图像进行二值化处理,得到包含循迹线轮廓的预处理图像。
15、在一实施方式中,对获取的包含循迹线的原始图像进行滤波,得到滤波后的原始图像包括:
16、使用预设通道对获取的包含循迹线的原始图像进行提取,得到单一通道的原始图像;
17、对所述单一通道的原始图像进行中值滤波,得到滤波后的原始图像。
18、在一实施方式中,对所述预处理图像进行形态学操作,确定所述预处理图像中的异常像素点包括:
19、对所述预处理图像进行膨胀,得到膨胀后的图像,对所述膨胀后的图像进行腐蚀,得到腐蚀后的图像;
20、提取所述腐蚀后的图像中每个像素点的像素值,确定像素值大于阈值的像素点为所述预处理图像中的异常像素点。
21、在一实施方式中,将所述异常像素点的像素值置反,确定置反后的所述预处理图像为目标图像包括:
22、在所述预处理图像中,将所述异常像素点的像素值置为零,确定置为零后的所述预处理图像为目标图像。
23、在一实施方式中,对所有定位点进行直线拟合,得到拟合后的循迹线包括:
24、根据医疗机器人的前进方向,对所有定位点的拟合权重进行赋值,其中,所有定位点向所述前进方向作垂线,在所述前进方向上最远的垂直点对应的定位点的拟合权重最高;
25、使用对应的拟合权重对所有定位点进行直线加权拟合,确定拟合直线为拟合后的循迹线。
26、第二方面,本技术实施例提供一种视觉循迹线的识别定位装置,所述识别定位装置包括:
27、预处理模块,用于对获取的包含循迹线的原始图像进行循迹线轮廓识别,得到包含循迹线轮廓的预处理图像;
28、目标图像确定模块,用于对所述预处理图像进行形态学操作,确定所述预处理图像中的异常像素点,将所述异常像素点的像素值置反,确定置反后的所述预处理图像为目标图像;
29、坐标确定模块,用于在所述目标图像的坐标系下,确定所述目标图像的每条横向像素行上所述循迹线轮廓的最左侧像素点的坐标和最右侧像素点的坐标;
30、定位点确定模块,用于针对任一条横向像素行,将所述最左侧像素点的坐标与所述最右侧像素点的坐标的均值作为所述循迹线轮廓在所述横向像素行对应的定位点,得到所述循迹线轮廓的所有定位点;
31、循迹线确定模块,用于对所有定位点进行直线拟合,得到拟合后的循迹线,所述拟合后的循迹线用于指示医疗机器人的中心点沿所述拟合后的循迹线运动。
32、在一实施方式中,所述识别定位装置还包括:
33、第一位置关系确定模块,用于在对所有定位点进行直线拟合,得到拟合后的循迹线之后,根据采集所述原始图像的采集设备在医疗机器人上的安装信息,确定所述医疗机器人的中心点与所述拟合后的循迹线的位置关系;
34、第二位置关系确定模块,用于根据所述中心点与前轮驱动轴的中点的位置关系,以及所述中心点与后轮驱动轴的中点的位置关系,确定所述前轮驱动轴的中点和所述后轮驱动轴的中点分别与所述拟合后的循迹线的位置关系;
35、控制模块,用于以所述前轮驱动轴的中点和所述后轮驱动轴的中点同时在所述拟合后的循迹线上为目标,控制所述医疗机器人前行时前后轮的转向角度。
36、在一实施方式中,所述预处理模块包括:
37、滤波单元,用于对获取的包含循迹线的原始图像进行滤波,得到滤波后的原始图像;
38、二值化处理单元,用于对所述滤波后的原始图像进行二值化处理,得到包含循迹线轮廓的预处理图像。
39、在一实施方式中,所述滤波单元包括:
40、通道过滤子单元,用于使用预设通道对获取的包含循迹线的原始图像进行提取,得到单一通道的原始图像;
41、中值过滤子单元,用于对所述单一通道的原始图像进行中值滤波,得到滤波后的原始图像。
42、在一实施方式中,所述目标图像确定模块包括:
43、形态学操作单元,用于对所述预处理图像进行膨胀,得到膨胀后的图像,对所述膨胀后的图像进行腐蚀,得到腐蚀后的图像;
44、异常点确定单元,用于提取所述腐蚀后的图像中每个像素点的像素值,确定像素值大于阈值的像素点为所述预处理图像中的异常像素点。
45、在一实施方式中,所述目标图像确定模块包括:
46、目标图像确定单元,用于在所述预处理图像中,将所述异常像素点的像素值置为零,确定置为零后的所述预处理图像为目标图像。
47、在一实施方式中,所述循迹线确定模块包括:
48、权值赋值单元,用于根据医疗机器人的前进方向,对所有定位点的拟合权重进行赋值,其中,所有定位点向所述前进方向作垂线,在所述前进方向上最远的垂直点对应的定位点的拟合权重最高;
49、循迹线确定单元,用于使用对应的拟合权重对所有定位点进行直线加权拟合,确定拟合直线为拟合后的循迹线。
50、第三方面,本技术实施例提供一种计算机设备,所述计算机设备包括处理器、存储器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如第一方面所述的识别定位方法。
51、第四方面,本技术实施例提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如第一方面所述的识别定位方法。
52、本技术实施例与现有技术相比存在的有益效果是:本技术对获取的包含循迹线的原始图像进行循迹线轮廓识别,得到包含循迹线轮廓的预处理图像,对预处理图像进行形态学操作,确定预处理图像中的异常像素点,将异常像素点的像素值置反,确定置反后的预处理图像为目标图像,在目标图像的坐标系下,确定目标图像的每条横向像素行上循迹线轮廓的最左侧像素点的坐标和最右侧像素点的坐标,针对任一条横向像素行,将最左侧像素点的坐标与最右侧像素点的坐标的均值作为循迹线轮廓在横向像素行对应的定位点,得到循迹线轮廓的所有定位点,对所有定位点进行直线拟合,得到拟合后的循迹线,拟合后的循迹线用于指示医疗机器人的中心点沿拟合后的循迹线运动,医疗机器人通过上述过程准确地识别定位出循迹线并拟合得到准确地循迹线结果,从而可以控制医疗机器人沿循迹线运动,降低了医疗机器人运动的控制难度。
- 还没有人留言评论。精彩留言会获得点赞!