基于计算机视觉的遥感图像变化智能检测方法及系统与流程
本发明涉及图像数据处理,具体涉及基于计算机视觉的遥感图像变化智能检测方法及系统。
背景技术:
1、遥感图像变化检测中,由于不同时期的遥感影像存在位置偏差,因此需要首先通过sift匹配的方法完成地物之间的匹配,但由于两幅图像的时间差异较大,同一个地物也发生了较大变化,常规的sift算法,未考虑在应用sift算法对遥感图像进行匹配时极值点之间的拓扑关系,极值点之间往往匹配结果较差,准确性不高。
2、基于此,本发明提出了一种基于计算机视觉的遥感图像变化智能检测方法及系统,通过计算每个初始极值点的拓扑结构稳定性,得到了在不同时间的遥感影像中变化较小的极值点参与匹配,这些极值点之间的拓扑关系稳定,保证了sift算法对遥感图像的匹配精度;
3、本发明提出了一种基于计算机视觉的遥感图像变化智能检测方法及系统,通过计算遥感图像中每个初始极值点的拓扑结构稳定性,得到了在不同时间的遥感影像中变化较小的因素参与匹配,提高了sift算法的匹配精度,进一步提高了对遥感图像变化检测的准确程度。
技术实现思路
1、本发明提供基于计算机视觉的遥感图像变化智能检测方法及系统,以解决现有的问题。
2、本发明的基于计算机视觉的遥感图像变化智能检测方法及系统采用如下技术方案:
3、本发明提供了基于计算机视觉的遥感图像变化智能检测方法,该方法包括以下步骤:
4、获取同一地区不同时期下的遥感图像,以及遥感图像对应的高斯图像和差分图像,获取遥感图像中的极值点;
5、将差分图像中极值点对应的两个高斯图像中,高斯模糊程度最小的高斯图像记为下行图像,高斯模糊程度最大的高斯图像记为上行图像,对上行图像和下行图像进行不同参数下的超像素分割,根据每一次获取的超像素分割块之间存在的共同边缘构建图结构,记为邻接图结构;根据任意极值点所在的超像素块,获取相邻的超像素块边缘的链码作为在邻接图结构中对应节点的节点值;获取邻接图结构的最短路径,根据最短路径按照顺序将节点值连接起来获得极值点的链码,每一个极值点都对应有两个链码;
6、根据任意极值点的两个链码长度之间的差异获得链码长度特征,将任意极值点对应的两个链码中最短的链码作为窗口在另一个链码上逐次滑动,根据滑动过程中链码序列中数值相等的数量与最短链码的长度之间的差异,获得若干个链码特征值,根据链码长度特征对最大链码特征值进行调节获得极值点的稳定因子;
7、获取若干个链码特征值从大到小排列,所形成对应链码特征值变化曲线的拐点的横坐标值,根据稳定因子对拐点的横坐标值以及极值点之间在所有超像素分割参数k值下两个链码对应的二元组所形成的序列之间的差异获得对应极值点的拓扑结构稳定性;
8、根据拓扑结构稳定性的大小对极值点进行删减,然后实现遥感图像匹配和变化检测。
9、进一步的,所述高斯图像和差分图像,获取方法如下:
10、利用sift算法获取遥感图像的高斯金字塔,将高斯金字塔中的图像记为高斯图像,将高斯金字塔中不同相邻模糊程度的高斯图像的差分结果图像记为差分图像,即一个差分图像对应两个模糊程度不同的高斯图像。
11、进一步的,所述根据每一次获取的超像素分割块之间存在的共同边缘构建图结构,包括的具体步骤如下:
12、利用不同大小的超像素分割参数k值对高斯图像进行超像素分割,获得若干个超像素块,将每一个超像素块作为节点,判断超像素块之间是否存在共同边缘,将存在共同边缘的超像素块进行连接,作为边,将任意极值点所在的超像素块记为极值点块,将与极值点块存在共同边缘的超像素块记为邻接块,则由邻接块与极值点块之间所获取的节点和边构建对应的图结构。
13、进一步的,所述根据任意极值点所在的超像素块,获取相邻的超像素块边缘的链码作为在邻接图结构中对应节点的节点值,包括的具体步骤如下:
14、获取任意极值点到所在极值点块与每个邻接块之间共同边缘上,极值点与共同边缘上像素点之间的最短距离,将最短距离下对应的共同边缘的像素点作为每个邻接区域的链码起点,通过逆时针旋转的方式进行链码编码,得到每个邻接区域边缘的链码,将链码作为邻接图结构中每个节点的节点值。
15、进一步的,所述获取邻接图结构的最短路径,根据最短路径按照顺序将节点值连接起来获得极值点的链码,获取方法如下:
16、通过dijkstra算法计算得到遍历所有节点的最短路径,即得到邻接图结构的最短路径,将最短路径对应的路途中节点链码通过路径对应的节点顺序,将节点的链码连接起来所形成的链码,作为该极值点的链码,即所有节点值链码按照路径顺序连接,形成极值点的链码。
17、进一步的,所述稳定因子,获取方法如下:
18、
19、其中,表示极值点的稳定因子,表示第i个超像素分割参数k值下极值点的短链码的长度,表示第i个超像素分割参数k值下极值点的长链码的长度,表示极值点的m个链码特征值序列,exp()表示以自然常数为底的指数函数,max()表示获取最大值;链码长度特征表示第i个极值点对应的短链码与长链码的长度比值。
20、进一步的,所述拓扑结构稳定性,获取方法如下:
21、将任意极值点作为目标极值点,获取目标极值点在所有超像素分割参数k值下两个链码对应的二元组所形成的序列,并获取目标极值点的第j个邻域块中极值点在所有超像素分割参数k值下两个链码对应的二元组所形成的序列;
22、获取遥感图像中任意极值点的拓扑结构稳定性:
23、
24、其中,w表示极值点的拓扑结构稳定性,表示极值点的稳定因子,x表示极值点对应链码特征值变化曲线上拐点所对应的横坐标值,n表示极值点的邻域极值点的数量,表示极值点在所有超像素分割参数k值下两个链码对应的二元组所形成的序列,表示极值点第j个邻域块中极值点在所有超像素分割参数k值下两个链码对应的二元组所形成的序列,e表示自然常数。
25、进一步的,所述根据拓扑结构稳定性的大小对极值点进行删减,然后实现遥感图像匹配和变化检测,包括的具体步骤如下:
26、首先,将拓扑结构稳定性小于预设拓扑结构稳定性阈值的极值点删除,将保留的极值点作为sift算法后续匹配过程中所用的关键点,利用sift算法实现对不同时期的遥感图像匹配;
27、然后,计算所匹配的两个不同时期遥感图像中相同区域之间的灰度值绝对差;
28、最后,预设阈值区间对灰度值绝对差进行分类,根据对不同区域的灰度值绝对差的分类结果,识别出两个不同时期遥感图像之间发生变化和未发生变化的区域,实现对遥感图像的变化检测。
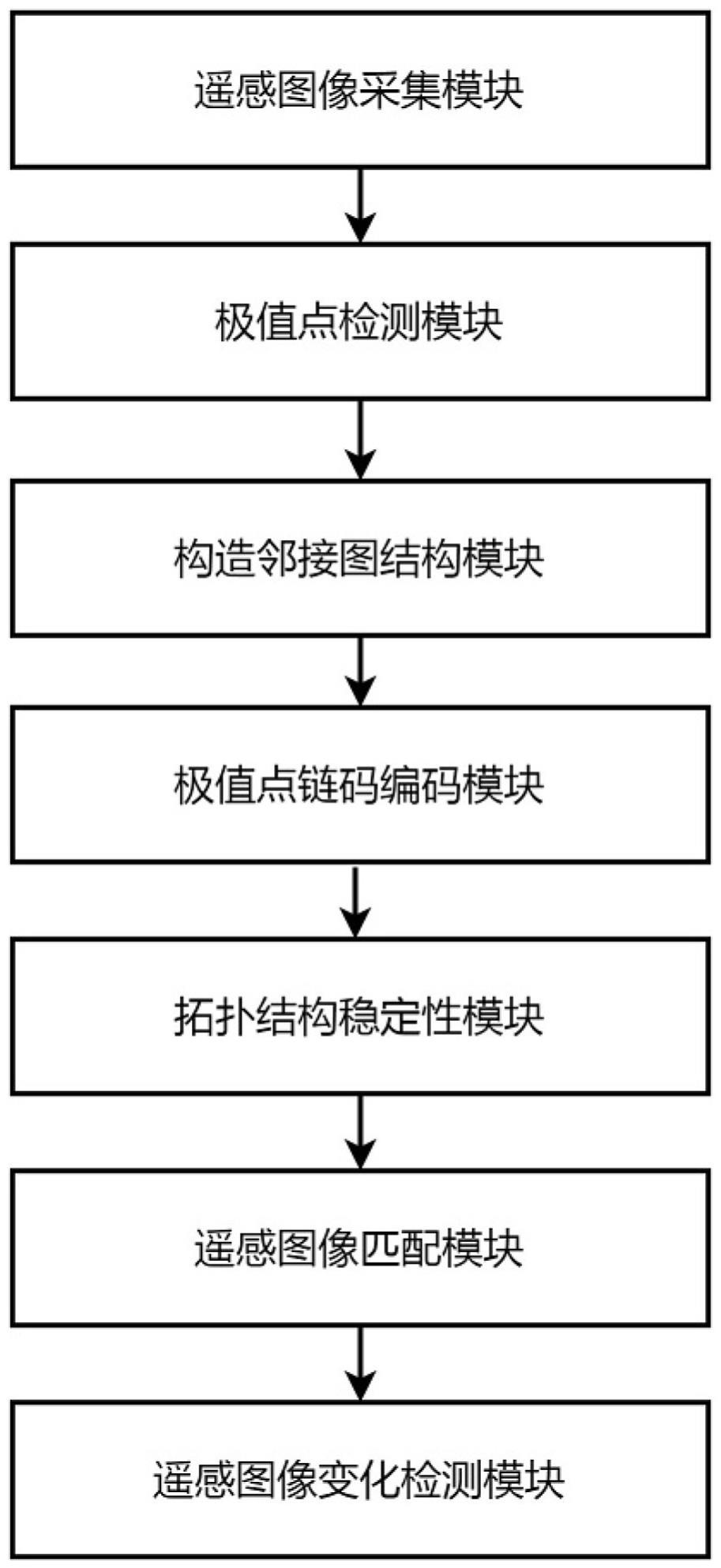
29、本发明另外还提供了一种基于计算机视觉的遥感图像变化智能检测系统,该系统包括以下模块:
30、遥感图像采集模块:利用遥感相机获取同一地区在不同时间下的遥感图像;
31、极值点检测模块:利用sift算法对遥感图像进行处理,获取所有遥感图像中的极值点;
32、构造邻接图结构模块:利用超像素分割算法对所有遥感图像进行处理,每一个遥感图像都获得若干个超像素块,并根据超像素块之间的位置关系以及超像素块中的极值点,将极值点所在的超像素块记为极值点块,将与极值点块存在共同边缘的超像素块称之为邻接块,根据极值点块以及对应的邻接块之间的邻接关系,构建对应的图结构,记为邻接图结构;
33、极值点链码编码模块:根据极值点块中极值点与邻接块的边缘之间的最小欧氏距离,获取对应的边缘像素点,记为链码起点,根据链码起点通过逆时针旋转的方式获取每个邻接块的边缘对应的链码,作为在邻接图结构中对应节点的节点值;
34、拓扑结构稳定性模块:根据极值点在上行图像和下行图像中链码长度的差异获得链码长度特征;根据上行图像和下行图像中链码进行滑窗对比,将链码作为滑窗进行对比的过程中,在对应位置处链码序列中对应位置元素值相同时,与较短链码的长度之间的比值记为链码特征值,将获得的任意极值点的若干个链码特征值所形成的序列,记为链码特征值序列;根据不同超像素分割参数下对应的链码长度特征对最大链码特征值进行调节,将调节结果中的最大值作为对应极值点的稳定因子;根据稳定因子和链码特征值序列获得任意极值点的拓扑结构稳定性;
35、遥感图像匹配模块:将极值点的拓扑结构稳定性作为极值点的权重,利用sift算法的后续操作,对遥感图像中的极值点进行删减,保留拓扑结构稳定性更强的极值点,实现对遥感图像进行最后的sift算法匹配;
36、遥感图像变化检测模块:利用sift算法对不同时期的遥感图像进行匹配后,实现遥感图像的匹配,然后利用图像差值法对所匹配的两个遥感图像进行差分,获取两个不同时期遥感图像中相匹配区域的之间灰度值存在差异的部分,预设灰度值阈值或区间范围对灰度值存在差异的部分进行分类,识别出遥感图像中发生变化和未发生变化的区域,实现对遥感图像变化的智能检测。
37、本发明的技术方案的有益效果是:通过将不同超像素尺度下的分割情况作为拓扑结构的范围扩大过程,得到了拓扑范围变大过程中,变化较小的极值点,有助于提高后续的匹配精度;通过计算拓扑结构的链码表示,得到了拓扑结构变化的定量表示,有助于得到拓扑结构的变化,筛选得到拓扑结构稳定性高的极值点,参与后续匹配过程,提高了匹配精度。
- 还没有人留言评论。精彩留言会获得点赞!