不确定性相容的自然层流翼构型梯度优化设计方法
本发明涉及飞行器设计,具体涉及一种不确定性相容的自然层流翼构型梯度优化设计方法。
背景技术:
1、层流减阻技术虽然在1930年就已提出,但截至目前,针对大型客机的层流控制仅局限于非升力面部件上,尚未应用于机翼等升力面部件。究其原因在于转捩预测和层流机翼工程设计是一个固有的不确定性问题,这显著地增加了层流机翼的设计难度。
2、一方面,层流到湍流的转捩机制复杂,转捩预测较为困难,目前暂无能同时模拟各种转捩机制,适用于工程实际应用的转捩数值预测方法[15]。就目前主流的转捩预测方法,例如基于线性稳定理论的转捩预测方法和基于输运方程的转捩预测方法,其中都包含需要人为标定的转捩阈值信息和经验相关系数。由于对转捩问题认知的缺乏,自然会在转捩预测中引入不确定性因素。
3、另一方面,层流的维持对飞机的加工制造和安装技术以及飞行状态和所处的环境尤其敏感。一般由于制造和安装技术的原因,飞机飞行的实际几何构型与cfd(computational fluid dynamics)数值分析设计中所用的几何构型存在差异。同时,飞行所处的来流状态和环境是复杂多变的,例如来流湍流度的变化和空气中昆虫污染等。层流的稳定性对这些几何和环境因素非常敏感,这也直接在层流控制技术的转捩抑制效果和转捩段数值预测结果上引入了不确定性因素。
技术实现思路
1、本发明的目的在于提供一种不确定性相容的自然层流翼构型梯度优化设计方法,以降低层流机翼的设计难度,进而推动层流减阻技术的应用和发展。
2、本发明解决上述技术问题的技术方案如下:
3、本发明提供一种不确定性相容的自然层流翼构型梯度优化设计方法,所述不确定性相容的自然层流翼构型梯度优化设计方法包括:
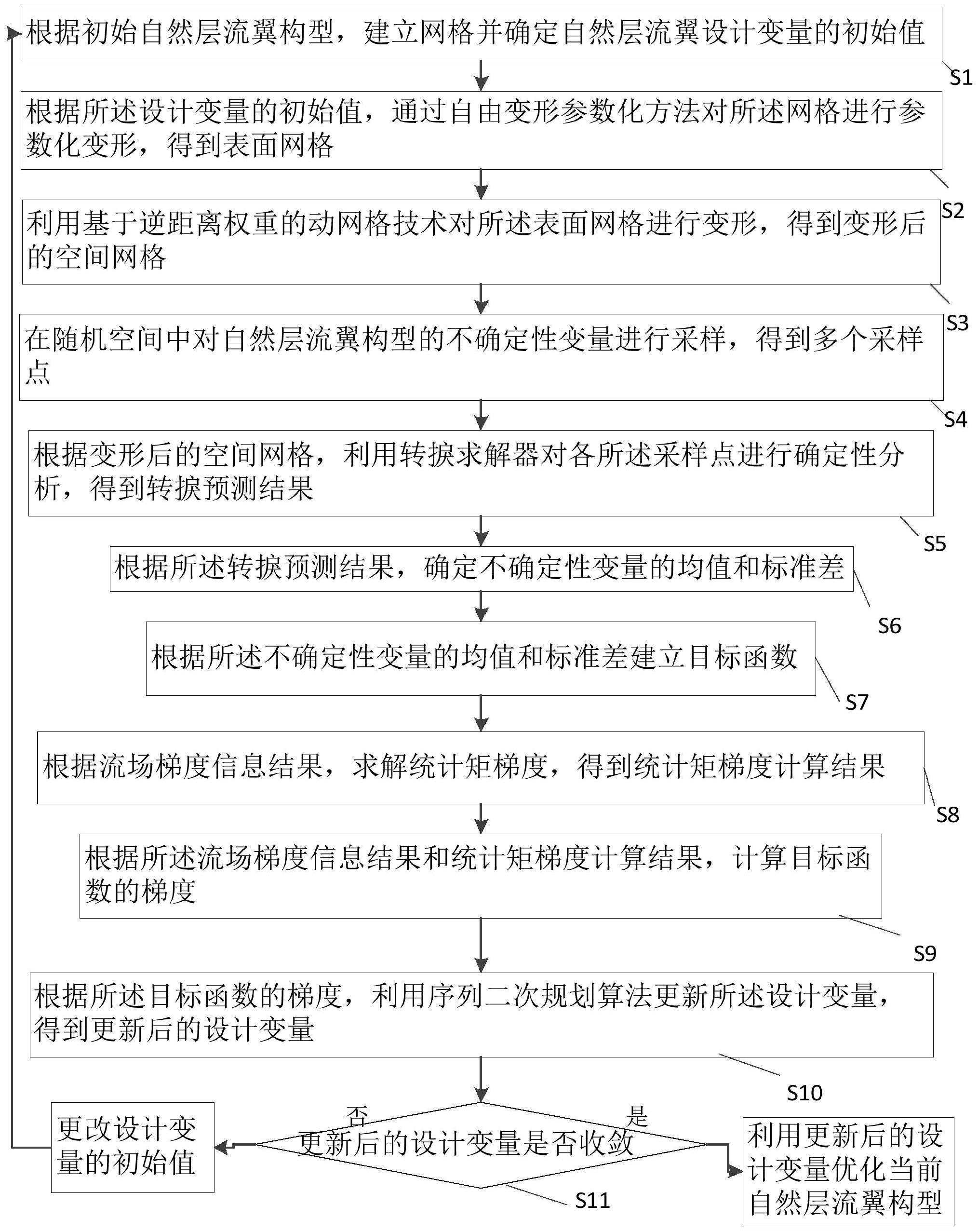
4、s1:根据初始自然层流翼构型,建立网格并确定自然层流翼设计变量的初始值;
5、s2:根据所述设计变量的初始值,通过自由变形参数化方法对所述网格进行参数化变形,得到表面网格;
6、s3:利用基于逆距离权重的动网格技术对所述表面网格进行变形,得到变形后的空间网格;
7、s4:在随机空间中对自然层流翼构型的不确定性输入变量进行采样,得到多个采样点;
8、s5:根据变形后的空间网格,利用转捩预测求解器对各所述采样点进行确定性分析,得到转捩预测结果;
9、s6:根据所述转捩预测结果,确定不确定性输出变量的均值和标准差;
10、s7:根据所述不确定性输出变量的均值和标准差建立目标函数;
11、s8:根据流场梯度信息结果,求解统计矩梯度,得到统计矩梯度计算结果;
12、s9:根据所述流场梯度信息结果和统计矩梯度计算结果,计算目标函数的梯度;
13、s10:根据所述目标函数的梯度,利用序列二次规划算法更新所述设计变量,得到更新后的设计变量;
14、s11:判断所述更新后的设计变量是否收敛,若是,利用所述更新后的设计变量优化当前自然层流翼构型;否则,更改设计变量的初始值并返回s1。
15、可选择地,所述s3包括:
16、根据所述表面网格和变形几何,计算所述表面网格中各子网格单元变化前后的法向扭转角和对应的平移距离;
17、根据各所述子单元变化前后的法向扭转角和对应的平移距离,得到变形后的空间网格。
18、可选择地,所述s4中,所述预设不确定性变量包括马赫数m和/或迎角α和/或几何变形;
19、所述采样点的数量由不确定性变量的数量、独立基函数多项式的阶数和过采样率确定,所述采样点的数量ns为:
20、
21、其中,m表示过采样率,p表示独立基函数多项式的阶数,n表示随机变量的数量,p表示采样点个数。
22、可选择地,所述s5包括:
23、s51:根据变形后的空间网格、初始固定转捩位置和飞行工况,求解rans方程,得到流场解;
24、s52:提取所述流场解中的截面压力分布数据;
25、s53:根据截面压力分布数据和飞行工况求解笛卡尔坐标系下层流边界方程,得到边界层信息;
26、s54:根据边界层信息,求解线性稳定性理论方程,结合en方法,获得预测转捩位置;
27、s55:根据所述预测转捩位置和当前固定转捩位置确定转捩残差;
28、s56:判断转捩残差是否收敛,若是,进入s57;否则,进入s58;
29、s57:将预测转捩位置输入到rans求解器中,得到转捩流场,并将所述预测转捩位置和所述转捩流场作为转捩预测结果输出;
30、s58:根据所述预测转捩位置和间歇因子方程,利用rans求解器,得到固定转捩流场;
31、s59:将所述固定转捩流场作为所述流场结果并返回步骤s52。
32、可选择地,所述s54包括:
33、s541:利用线性稳定性lst分析/aft-c1准则对边界层信息进行稳定性分析,得到空间扰动放大率;
34、s542:根据空间扰动放大率和流向扰动增长率,确定流向扰动放大因子;
35、s543:若流向扰动放大因子到达阈值,则根据流向扰动放大因子,确定预测转捩位置;
36、所述s541中,所述空间扰动放大率αi为:
37、
38、其中,ωi表示扰动频率的虚部,ωr表示扰动频率的实部,αr表示流向的扰动波数,βr表示展向的扰动波数;
39、所述预测转捩位置xtr通过以下公式计算得到:
40、
41、其中,ncr表示临界n因子,xl和xr是网格的左右两侧坐标,nl和nr分别是对应的放大因子值。
42、可选择地,所述s6包括:
43、s61:将不确定性变量分解为确定和随机两部分,得到不确定性变量的无穷级数表达式;
44、s62:对不确定性变量的无穷级数表达式进行归一化求导及混沌展开,并进行梯度增强,得到梯度增强后的混沌展开结果;
45、s63:根据所述梯度增强后的混沌展开结果构建线性方程组;
46、s64:根据所述转捩预测结果,求解所述线性方程组的系数矩阵;
47、s65:根据所述线性方程组的系数,得到不确定性输出变量的均值和标准差。
48、可选择地,所述s61中,所述不确定性变量的无穷级数表达式为:
49、
50、其中,d为确定性设计变量向量,ξ为不确定性变量向量,αj(d)为第j阶的确定性部分,ψj(ξ)为第j阶的随机部分。
51、可选择地,所述s63中,所述线性方程组为:
52、[ψ][c]=[q]
53、其中,[ψ]表示基函数矩阵,矩阵大小为[ns×nb],ns为采样点的数量,nb为基函数的数量,[c]为线性方程组的系数矩阵,矩阵大小为[nb×nq],nq为输出随机变量的数量,[q]为流场结果矩阵,矩阵大小为[ns×nq]。
54、可选择地,所述s65中,所述不确定性变量的均值e(ξ)为:
55、e(ξ)=α0
56、所述不确定性变量的标准差σ(ξ)为:
57、
58、其中,α0为线性方程组的系数矩阵展开后的第一个系数,αj表示第j阶的确定性部分,ψj表示第j阶的基函数,p表示采样点个数。
59、可选择地,所述s9中,
60、所述目标函数j为:
61、j=k1×e(ξ)+k2×σ(ξ)
62、所述目标函数的梯度为:
63、
64、其中,k1和k2分别表示不确定性目标函数组合权重系数,e(ξ)表示不确定性变量的均值,σ(ξ)表示不确定性变量的标准差,d表示确定性设计变量向量,ξ为不确定性变量向量。
65、本发明具有以下有益效果:
66、本发明的结合转捩预测和不确定性分析进行梯度优化设计,一方面,能够提高层流翼构型的抗扰动能力,提升层流翼构型的平均性能和性能鲁棒性;另一方面,能够降低层流机翼的设计难度,进而推动层流减阻技术的应用和发展。
- 还没有人留言评论。精彩留言会获得点赞!