作业机械的控制方法和装置与流程
本技术属于作业机械领域,尤其涉及一种作业机械的控制方法和装置。
背景技术:
1、在作业机械对目标对象进行托举或叉取的过程中,需要设计作业机械的运动路径以精准地托举或叉取目标对象。相关技术中,主要基于作业机械的当前位姿信息规划下一段运行路线,待作业机械到达下一段运行路线终点后再基于当前位姿信息规划下一段运行路线,需多次规划作业机械的运行路径,以托举或叉取目标对象,常用的作业机械的控制方法过程复杂,需要多次调整作业机械的位姿进行对齐,作业机械的作业效率较低。
技术实现思路
1、本技术旨在至少解决现有技术中存在的技术问题之一。为此,本技术提出一种作业机械的控制方法和装置,作业机械可以自行调整位置来托举或叉取目标对象,无需作业机械多次调整之后再托举或叉取目标对象,简化了作业机械的运动,提升了作业机械的作业效率。
2、第一方面,本技术提供了一种作业机械的控制方法,该方法包括:
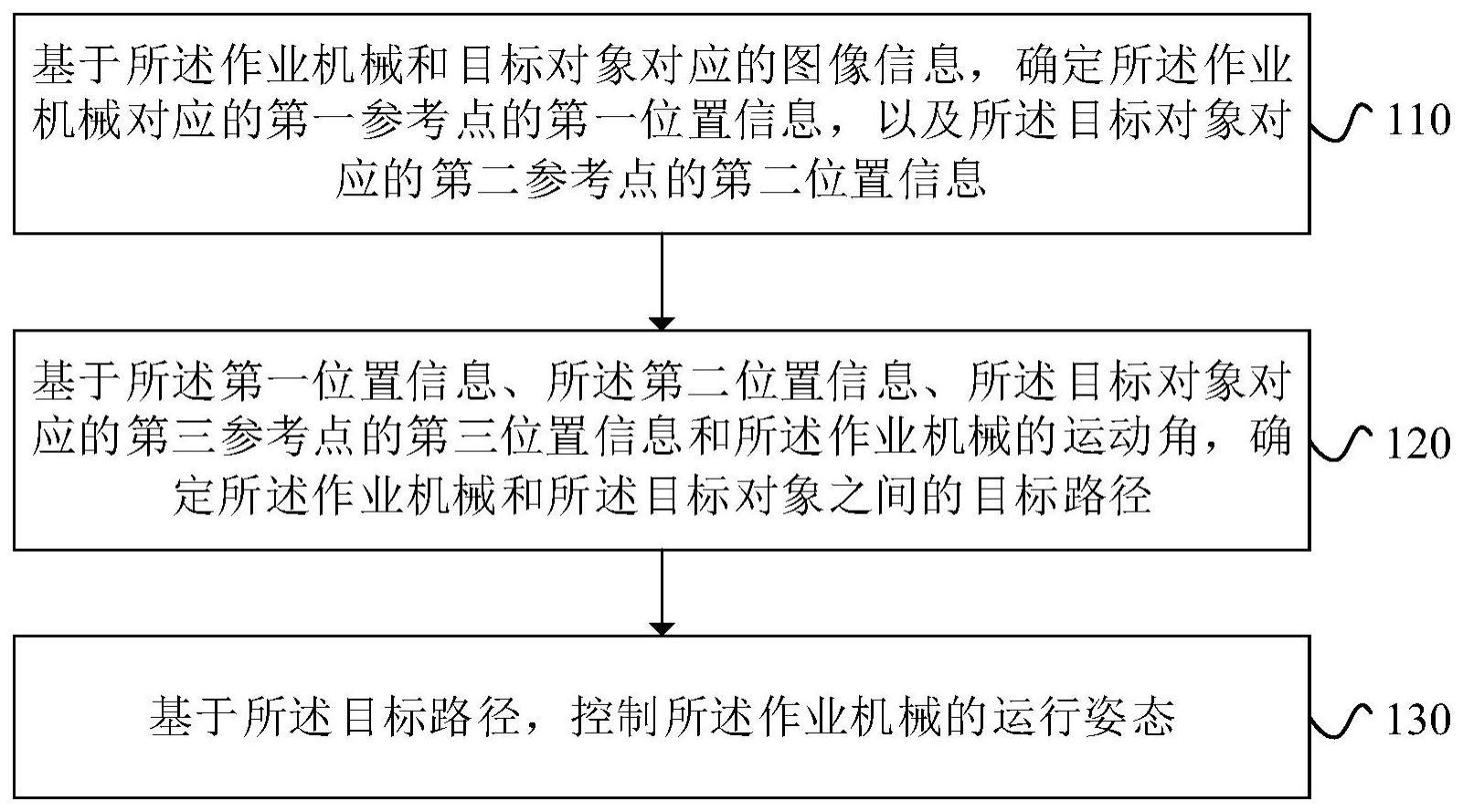
3、基于作业机械和目标对象对应的图像信息,确定作业机械对应的第一参考点的第一位置信息,以及目标对象对应的第二参考点的第二位置信息;第二参考点为目标对象的中轴线上的点,中轴线在作业机械与目标对象的投影面内;
4、基于第一位置信息、第二位置信息、目标对象对应的第三参考点的第三位置信息和作业机械的运动角,确定作业机械和目标对象之间的目标路径;运动角为作业机械沿直线向目标对象行驶过程中,作业机械的运动方向与中轴线之间的夹角;
5、基于目标路径,控制作业机械的运行姿态;
6、目标路径包括至少两段子曲线段和至少两段子直线段,第一参考点为至少两段子曲线段中第一子曲线段的端点;第二参考点和第三参考点为至少两段子直线段中第一子直线段的端点,且第二参考点为至少两段子曲线段中第二子曲线段的端点。
7、根据本技术实施例提供的作业机械的控制方法,通过确定作业机械运动路径上的多个参考点以将运动路径分解为至少两段子直线段和至少两段子曲线段,并控制作业机械基于分解后的运动路径运行,作业机械可以自行调整位置来托举或叉取目标对象,无需作业机械多次调整之后再托举或叉取目标对象,简化了作业机械的运动,提升了作业机械的作业效率,解决了多次堆放后目标对象的位置偏差累计。
8、本技术一个实施例的作业机械的控制方法,基于第一位置信息、第二位置信息、目标对象对应的第三参考点的第三位置信息和作业机械的运动角,确定作业机械和目标对象之间的目标路径,包括:
9、基于第一位置信息和运动角,确定第四参考点相对于第一参考点的第一位姿偏差;基于第二位置信息和运动角,确定第五参考点相对于第二参考点的第二位姿偏差;其中,第四参考点为第一子曲线段的端点,第五参考点为第二子曲线段的端点;且第四参考点和第五参考点为至少两段子直线段中第二子直线段的端点;
10、基于第一位置信息、第三位置信息、第一位姿偏差、第二位姿偏差和运动角,确定第四参考点和第五参考点之间的第三位姿偏差;
11、基于第一位姿偏差、第二位姿偏差和第三位姿偏差,获取第一参考点和第二参考点之间的纵轴误差;
12、在纵轴误差不超过目标阈值的情况下,基于纵轴误差确定第四参考点的第四位置信息和第五参考点的第五位置信息;
13、基于第一位置信息、第二位置信息、第三位置信息、第四位置信息和第五位置信息,确定目标路径。
14、本技术一个实施例的作业机械的控制方法,在纵轴误差不超过目标阈值的情况下,基于纵轴误差确定第四参考点的第四位置信息和第五参考点的第五位置信息,包括:
15、在纵轴误差不超过目标阈值的情况下,从目标旋转半径边界范围内获取第一参考点和第四参考点之间的第一旋转半径,以及第二参考点和第五参考点之间的第二旋转半径;
16、基于第一旋转半径和第一位姿偏差确定第四位置信息;基于第二旋转半径和第二位姿偏差确定第五位置信息。
17、本技术一个实施例的作业机械的控制方法,基于第一位置信息和运动角,确定第四参考点相对于第一参考点的第一位姿偏差;基于第二位置信息和运动角,确定第五参考点相对于第二参考点的第二位姿偏差,包括:
18、基于第一位置信息确定作业机械对应的位姿角,并将位姿角和运动角之间的差值确定为第一参考点和第四参考点之间的第一旋转角;位姿角为作业机械延长线与x轴之间的夹角;
19、基于位姿角、运动角和第一旋转角,确定第一位姿偏差;
20、将运动角确定为第二参考点和第五参考点之间的第二旋转角;
21、基于第二旋转角,确定第二位姿偏差。
22、本技术一个实施例的作业机械的控制方法,基于第一位置信息、第二位置信息、第三位置信息、第四位置信息和第五位置信息,确定目标路径,包括:
23、基于第一位置信息和第四位置信息,采用插值算法,确定第一参考点和第四参考点之间的第一子曲线段;
24、基于第四位置信息和第五位置信息,采用插值算法,确定第四参考点和第五参考点之间的第二子直线段;
25、基于第二位置信息和第五位置信息,采用插值算法,确定第二参考点和第五参考点之间的第二子曲线段;
26、基于第二位置信息和第三位置信息,采用插值算法,确定第二参考点和第三参考点之间的第一子直线段;
27、基于第一子曲线段、第二子直线段、第二子曲线段和第一子直线段,确定目标路径。
28、本技术一个实施例的作业机械的控制方法,基于作业机械和目标对象对应的图像信息,确定作业机械对应的第一参考点的第一位置信息,以及目标对象对应的第二参考点的第二位置信息,包括:
29、获取目标雷达建立的作业机械的活动区域地图,以及图像传感器采集的图像信息;
30、基于图像信息,获取作业机械的第一位姿和目标对象的第二位姿;
31、将第一位姿和第二位姿转换至活动区域地图,获取作业机械在活动区域地图上的第一参考点的第一位置信息,以及目标对象在活动区域地图上的第二参考点的第二位置信息。
32、第二方面,本技术提供了一种作业机械的控制装置,该装置包括:
33、第一处理模块,用于基于作业机械和目标对象对应的图像信息,确定作业机械对应的第一参考点的第一位置信息,以及目标对象对应的第二参考点的第二位置信息;第二参考点为目标对象的中轴线上的点,中轴线在作业机械与目标对象的投影面内;
34、第二处理模块,用于基于第一位置信息、第二位置信息、目标对象对应的第三参考点的第三位置信息和作业机械的运动角,确定作业机械和目标对象之间的目标路径;运动角为作业机械沿直线向目标对象行驶过程中,作业机械的运动方向与中轴线之间的夹角;
35、第三处理模块,用于基于目标路径,控制作业机械的运行姿态;
36、目标路径包括至少两段子曲线段和至少两段子直线段,第一参考点为至少两段子曲线段中第一子曲线段的端点;第二参考点和第三参考点为至少两段子直线段中第一子直线段的端点,且第二参考点为至少两段子曲线段中第二子曲线段的端点。
37、根据本技术实施例提供的作业机械的控制装置,通过确定作业机械运动路径上的多个参考点以将运动路径分解为至少两段子直线段和至少两段子曲线段,并控制作业机械基于分解后的运动路径运行,作业机械可以自行调整位置来托举或叉取目标对象,无需作业机械多次调整之后再托举或叉取目标对象,简化了作业机械的运动,提升了作业机械的作业效率,解决了多次堆放后目标对象的位置偏差累计。
38、第三方面,本技术提供了一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,处理器执行计算机程序时实现如上述第一方面的作业机械的控制方法。
39、第四方面,本技术提供了一种非暂态计算机可读存储介质,其上存储有计算机程序,计算机程序被处理器执行时实现如上述第一方面的作业机械的控制方法。
40、第五方面,本技术提供了一种计算机程序产品,包括计算机程序,计算机程序被处理器执行时实现如上述第一方面的作业机械的控制方法。
41、本技术实施例中的上述一个或多个技术方案,至少具有如下技术效果之一:
42、通过确定作业机械运动路径上的多个参考点以将运动路径分解为至少两段子直线段和至少两段子曲线段,并控制作业机械基于分解后的运动路径运行,作业机械可以自行调整位置来托举或叉取目标对象,无需作业机械多次调整之后再托举或叉取目标对象,简化了作业机械的运动,提升了作业机械的作业效率,解决了多次堆放后目标对象的位置偏差累计。
43、进一步地,通过第一参考点、第二参考点和第三参考点的位置信息以及作业机械的运动角,可以得到第四参考点与第一参考点之间的第一位姿偏差、第五参考点与第二参考点之间的第二位姿偏差以及第四参考点和第五参考点之间的第三位姿偏差,然后基于各个参考点之间的位姿偏差获取第一参考点和第二参考点之间的纵轴误差,并在纵轴误差不超过目标阈值的情况下,基于纵轴误差确定第四参考点的第四位置信息和第五参考点的第五位置信息,进而确定目标路径,在规划目标路径的过程中考虑了作业机械的运动模型,拓宽了适用场景;且通过作业机械和目标对象之间的横纵向误差限制求解目标路径,提高了托举或叉取目标对象的精度。
44、更进一步地,在纵轴误差不超过目标阈值的情况下,从目标旋转半径边界范围内获取第一旋转半径以及第二旋转半径,考虑了作业机械的运动模型,作业机械可以更连贯更简洁地托举或叉取目标对象,拓宽了适用场景;然后基于第一旋转半径和第一位姿偏差确定第四位置信息,并基于第二旋转半径和第二位姿偏差确定第五位置信息,进而可以基于各个参考点的位置信息获取目标路径,提高了作业机械托举或叉取目标对象的精准度和准确度。
45、再进一步地,通过对各参考点对应的位置信息采用插值算法,扩大了数据量,以得到作业机械的运动轨迹,进而确定目标路径,提高了作业机械托举或叉取目标对象的精准度和准确度。
46、本技术的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本技术的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!