一种基于孤立森林算法和目标跟踪的交通事故检测方法
本发明涉及图像处理,特别是涉及一种基于孤立森林算法和目标跟踪的交通事故检测方法。
背景技术:
1、随着现今社会城市化进程的不断加快,城市交通规模愈发庞大,交通事故的发生也更加频繁,社会对智能交通事故识别的需求日益迫切。
2、在过去的几十年中,事件检测问题引发了国内外众多研究者的广泛兴趣,基于模式识别、神经网络、支持向量机、模糊逻辑、卡尔曼滤波和时间序列分析等方法的交通事故检测算法都取得了不同程度的成果。
3、加利福利亚算法是早期高速公路交通检测算法,该算法通过比较临近检测点之间的交通流量参数数据,对可能的突发交通事件进行判别。随后,又出现了标准偏差算法、双指数平滑算法、贝叶斯算法。基于突变理论的mcmaster算法首次将过大交通需求引发的频繁性拥堵作为分析和判断的对象。在早期的交通事件检测算法中,加州算法和mcmaster算法在准确性和实时性等方面优势明显,被认为是综合性能最好的两种经典算法,通常用作其他算法评估的标杆。20世纪90年代以后,一系列人工智能算法逐渐出现在交通事件自动检测算法中。其中,chew等人提出了人工神经网络结构模型,在交通事件检测中取得良好的检测效果。abdulhai将概率神经网络应用到突发交通事件检测中。fang yuan和rucy longcheu提出基于支持向量机的交通事件检测算法。shaurya agarwal提出利用小波变换和逻辑回归的混合模型检测交通事件。纵观交通事件检测发展历程,早期aid算法基于模式识别和突变理论,成为高速公路交通事件检测的经典算法。后期的人工智能aid算法是基于新兴理论和硬件技术的革新,在检测效果和检测性能上显得更有优势。但目前的交通事故检测算法还没有达到理想的效果,因而还需要深入研究核心算法。
技术实现思路
1、本发明针对现有技术中交通事故检测效果仍需改善的问题,提供一种在检测效果和性能上更有优势的基于孤立森林算法和目标跟踪的交通事故检测方法。
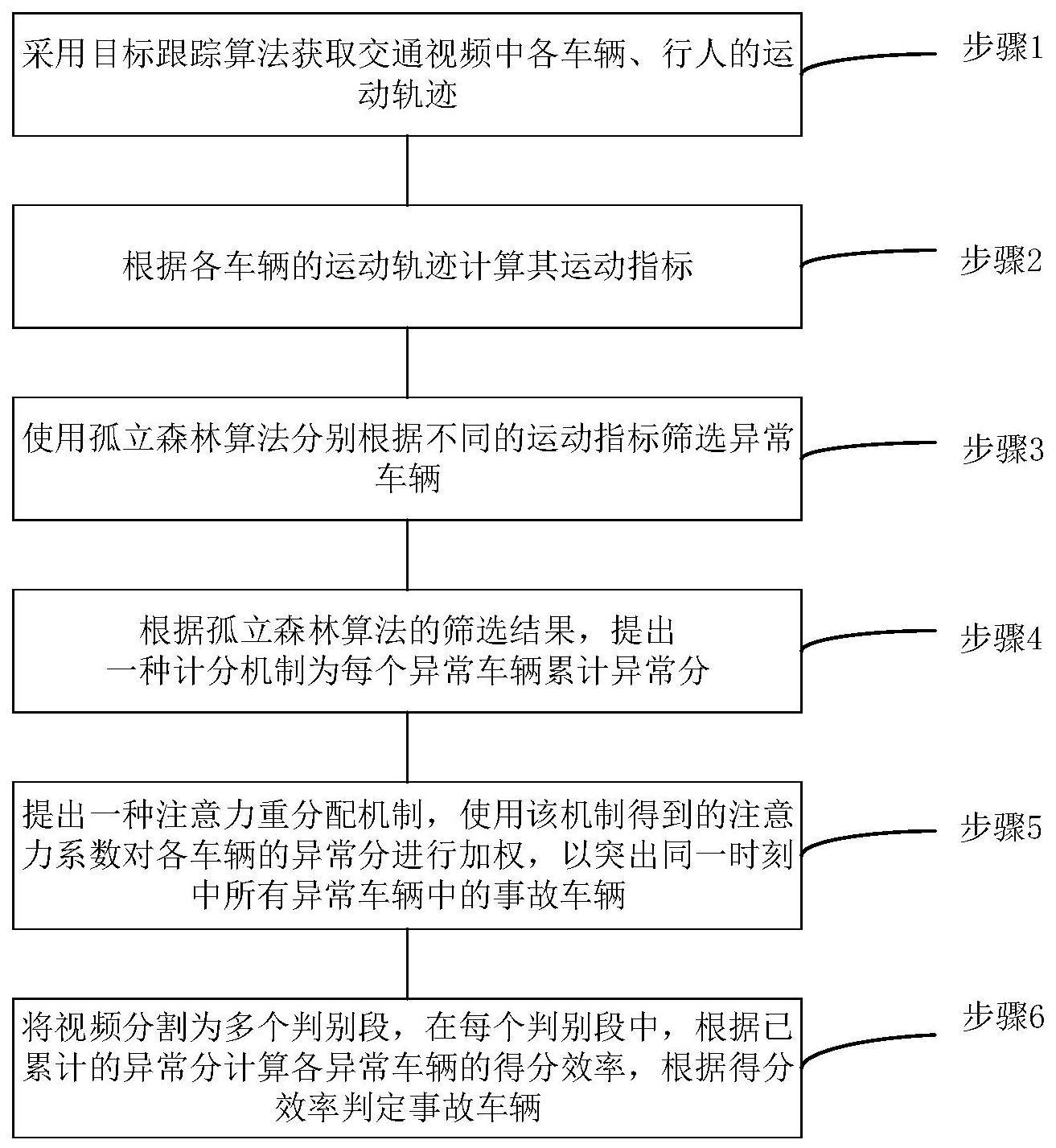
2、本发明的技术解决方案是,提供一种具有以下步骤的基于孤立森林算法和目标跟踪的交通事故检测方法:含有以下步骤,步骤1:对于输入的交通视频数据,首先使用目标跟踪技术获取其每一帧图像中的车辆、行人位置,并对不同帧中的车辆、行人位置进行数据关联,得到视频中各车辆、行人的运动轨迹;步骤2:根据各车辆的运动轨迹计算其运动指标;步骤3:使用孤立森林算法分别根据不同的运动指标筛选异常车辆;步骤4:根据孤立森林算法的筛选结果,提出计分机制为每个异常车辆累计异常分;步骤5:提出注意力重分配机制,通过得到的注意力系数对各车辆的异常分进行加权,突出同一时刻中所有异常车辆中的事故车辆;步骤6:将视频分割为多个判别时段,在每个判别时段中,根据已累计的异常分计算各异常车辆的得分效率,根据得分效率判定事故车辆。
3、优选地,所述步骤1中以视频的单一模态数据为基础进行交通事故检测,采用目标跟踪算法获取视频数据中车辆、行人的运动轨迹,对于每帧图像中的每一车辆、行人,其运动轨迹的具体形式为:中心点像素坐标、检测框像素高度、检测框像素宽度、track id以及帧序号。
4、优选地,所述步骤2中根据各车辆的运动轨迹计算其运动指标,首先将车辆、行人的运动轨迹信息在时间维度上进行压缩,对于视频中每一秒所对应的多帧轨迹信息,根据trackid区分不同的车辆、行人,仅保留每一车辆、行人第一次出现时的轨迹信息,将轨迹压缩后的最小时间单位称为时刻,然后根据各车辆在多个时刻的位置,分别计算车辆的速度、加速度、航向角;具体步骤如下:以track id区分不同的车辆,设同一车辆在两个相邻的时刻t1、t2(t1<t2)中的两条轨迹信息分别为:t1时刻中心点像素横坐标x1、像素纵坐标y1、检测框像素高度h1、检测框像素宽度w1;t2时刻中心点像素横坐标x2、像素纵坐标y2、检测框像素高度h2和检测框像素宽度w2,
5、计算尺度归一化系数如下式:
6、
7、计算速度如下式:
8、
9、
10、
11、其中vt2x为t2时刻x轴方向归一化分速度、vt2y为t2时刻y轴方向归一化分速度、vt2为t2时刻速度;
12、计算加速度如下式:
13、
14、计算航向角如下式:
15、
16、其中σ为一极小的正数。
17、优选地,所述步骤3中使用提前训练好的孤立森林算法分别根据不同的运动指标筛选异常车辆,将同一时刻内所有车辆的速度、加速度、航向角分别送入三个孤立森林模型中,分别得到速度、加速度和航向角异常的车辆。
18、优选地,所述步骤4中根据孤立森林算法的筛选结果,提出一种计分机制为每个异常车辆累计异常分,计分机制包括:运动指标异常计分和车辆环境异常计分,对于运动指标存在异常的车辆计算其运动指标异常分,然后判断其车辆环境是否异常,若异常则计算车辆环境异常分,最后对两者取平均值得到异常分;
19、其中运动指标异常分计算公式为:
20、smotion=α·sspeed+β·sacc+γ·sθ,(α+β+γ=1),
21、上式中,α、β、γ分别为速度异常分权重、加速度异常分权重、航向角异常分权重;sspeed、sacc、sθ分别为速度异常分、加速度异常分、航向角异常分,当车辆速度异常时sspeed为1,否则为0;当车辆加速度异常时sacc为1,否则为0;当车辆航向角异常时sθ为1,否则为0;
22、其中车辆环境异常判定方式为:车辆附近有人且人车归一化距离小于1时计分,人车归一化距离的计算公式为:
23、
24、上式中xperson为人的中心点像素横坐标、yperson为人的中心点像素纵坐标、hperson为人的检测框像素高度、wperson为人的检测框像素宽度、xcar为车的中心点像素横坐标、ycar为车的中心点像素纵坐标、hcar为车的检测框像素高度、wcar为车的检测框像素宽度;
25、对于每一异常车辆,若车辆环境无异常,即所有行人与车辆的人车归一化距离中最小值大于1,则车辆环境异常分为0,否则按照下式计算车辆环境异常分:
26、sdistance=1-dmin,
27、上式中,dmin为所有行人与车辆的人车归一化距离中最小值;
28、车辆异常分的计算公式为:
29、
30、上式中,smotion为运动指标异常分,sdistance为车辆环境异常分。
31、优选地,所述步骤5中注意力重分配机制将同一时刻中部分异常车辆的注意力系数部分转移给其它异常车辆,使用其得到的注意力系数对各车辆的异常分进行加权,突出同一时刻中所有异常车辆中的事故车辆;其中注意力重分配机制为:注意力转移前每一异常车辆的注意力系数为1,每一时刻的注意力总值等于该时刻的异常车辆数量;对于每一异常车辆,查询其在当前时刻之前的预警次数t,按照下式将其预警次数t映射为权重wt:
32、
33、统计当前时刻所有异常车辆的最大异常分smax,对于当前时刻的每一异常车辆,按照下式将其异常分s映射为权重ws:
34、
35、对于每一异常车辆,设当前时刻异常车辆总数为n,按照下式计算注意力重分配后每一异常车辆的注意力系数:
36、
37、优选地,所述步骤6中将视频分割为多个判别时段,在每个判别时段中根据已累计的异常分计算各异常车辆的得分效率,根据得分效率判定事故车辆,其中以track id区分不同的异常车辆,根据各异常车辆得分效率是否超过预警阈值累计其预警次数,将得分效率超过报警阈值的异常车辆判定为事故车辆,所述得分效率的计算公式为:
38、
39、其中,l为该段连续帧的总时刻数,wij和sij分别为第i个异常车辆在第j时刻的注意力系数和异常分。
40、与现有技术相比,本发明基于孤立森林算法和目标跟踪的交通事故检测方法具有以下优点:本发明基于目标跟踪算法获取的车辆运动轨迹计算车辆的各运动指标,能快速准确地定位、区分视频中的车辆,且仅使用图像这一单一模态数据作为算法输入,能有效提高算法运行效率并降低硬件成本。使用孤立森林算法筛选运动指标异常的车辆并计分,相比于直接根据运动指标是否异常判定事故,引入离群值判别方法对异常进行检测,能有效避免由红灯、堵车等特殊情况导致的误检。另外引入一种注意力重分配机制,突出异常车辆中的事故车辆,该机制能有效地增大事故车辆与其他异常车辆的异常分差距,减少因事故车辆引发周边车辆运动指标异常而导致的误检,提高算法的整体性能。最后通过计算一段连续帧内车辆的得分效率进行事故判别,采用分段判别的方式,能降低由司机临时制动、算法前置步骤误差等短时间内偶发因素造成的误检。
41、本发明能在交通视频中精确高效检测出交通事故,且可以精准定位事故车辆在图像中的位置,其实时性和细粒度定位能力极大地提高了本发明的实用性,使用户能快速准确地了解道路情况。
- 还没有人留言评论。精彩留言会获得点赞!