一种结合上下文感知的自适应目标跟踪方法
本发明属于计算机视觉领域,具体为一种结合上下文感知的自适应目标跟踪方法。
背景技术:
1、目标跟踪技术在机器视觉领域中扮演着重要角色,它能够在已知的目标初始位置和大小的情况下,训练出一种能够区分背景和目标的相关滤波器,从而识别和跟踪目标在后续视频序列中的位置。为了提高跟踪精度,目标跟踪算法需要不断地更新相关滤波参数。近年来,随着科技的进步和视频采集技术的广泛应用,越来越多的研究人员开始关注目标跟踪领域。当前,目标跟踪技术已经被广泛应用于自动驾驶系统、交通监控、无人机技术和导航制导等领域。
2、相关滤波跟踪算法通过使用快速傅立叶变换以及循环移位的方法实现了实时的密集采样以及高维度的特征训练和检测。2010年bolme等人提出了最小输出误差平方和(minimum output sum ofsquared error,mosse)目标跟踪算法,并成功将相关滤波算法引入到目标跟踪领域。henriques等提出了核循环结构检测跟踪(circulant structureoftracking-by-detection with kernels,csk)算法,将循环矩阵理论以及核方法应用于相关滤波跟踪,随后作者又在核相关滤波(kernel correlation filter,kcf)算法中使用梯度方向直方图(histogram of oriented gradient,hog)特征对csk算法进行改进。在目标跟踪的过程中,为了处理尺度变化的问题,danelljan等提出了区分尺度空间(discriminative scale space tracker,dsst)跟踪算法,利用两个单独的滤波器分别用于对跟踪目标的位置和尺度估计,实现了对跟踪目标的尺度自适应。bertinetto等人提出了结合模板和像素特征的分类器(sum oftemplate and pixel-wise learners,staple)跟踪算法。由于hog特征和颜色直方图特征两者之间相互弥补,staple便使用固定权重系数将两种特征方法进行融合,大大提高了跟踪精度。在基于相关滤波改进的算法针对边界效应,danelljan等人提出了空间正则化相关滤波(spatially regularized correctionfilter,srdcf)跟踪算法。该算法采用了更大的检测区域以保留更多的真实信息并且通过加入空间正则化来解决边界效应。ma等提出基于多层卷积特征的跟踪器(hierarchicalconvolutional features forvisual tracking,hcf)算法,在相关滤波跟踪算法的基础上使用深度特征。hcf可以有效地解决目标形变的问题,但是当目标出现遮挡时仍然会出现跟踪失败的情况。
3、尽管目标跟踪技术近年来有了一定程度的进展,但仍然存在一些问题。在运动过程中,由于目标的姿态和拍摄角度的变化,目标通常会呈现出不同程度的形变,而现有的目标跟踪算法很难适应这种剧烈变化。此外,在实际跟踪场景中,目标周围经常出现形状、色彩等外观属性相似的干扰物体,这容易导致跟踪算法的判别错误。同时,当目标受到严重遮挡时,由于特征信息的限制,跟踪算法也很难对其进行稳定跟踪。这些实际跟踪场景中的问题对跟踪算法的性能构成了巨大的挑战。因此,开发一种具有较高精度和鲁棒性的目标跟踪算法变得十分重要。
技术实现思路
1、本发明提出了一种结合上下文感知的自适应目标跟踪方法,解决了目标跟踪方法在目标遮挡、颜色变化以及背景复杂等场景下的跟踪性能较差的问题。
2、实现本发明目的的技术方案为:一种结合上下文感知的自适应目标跟踪方法,包括以下步骤:
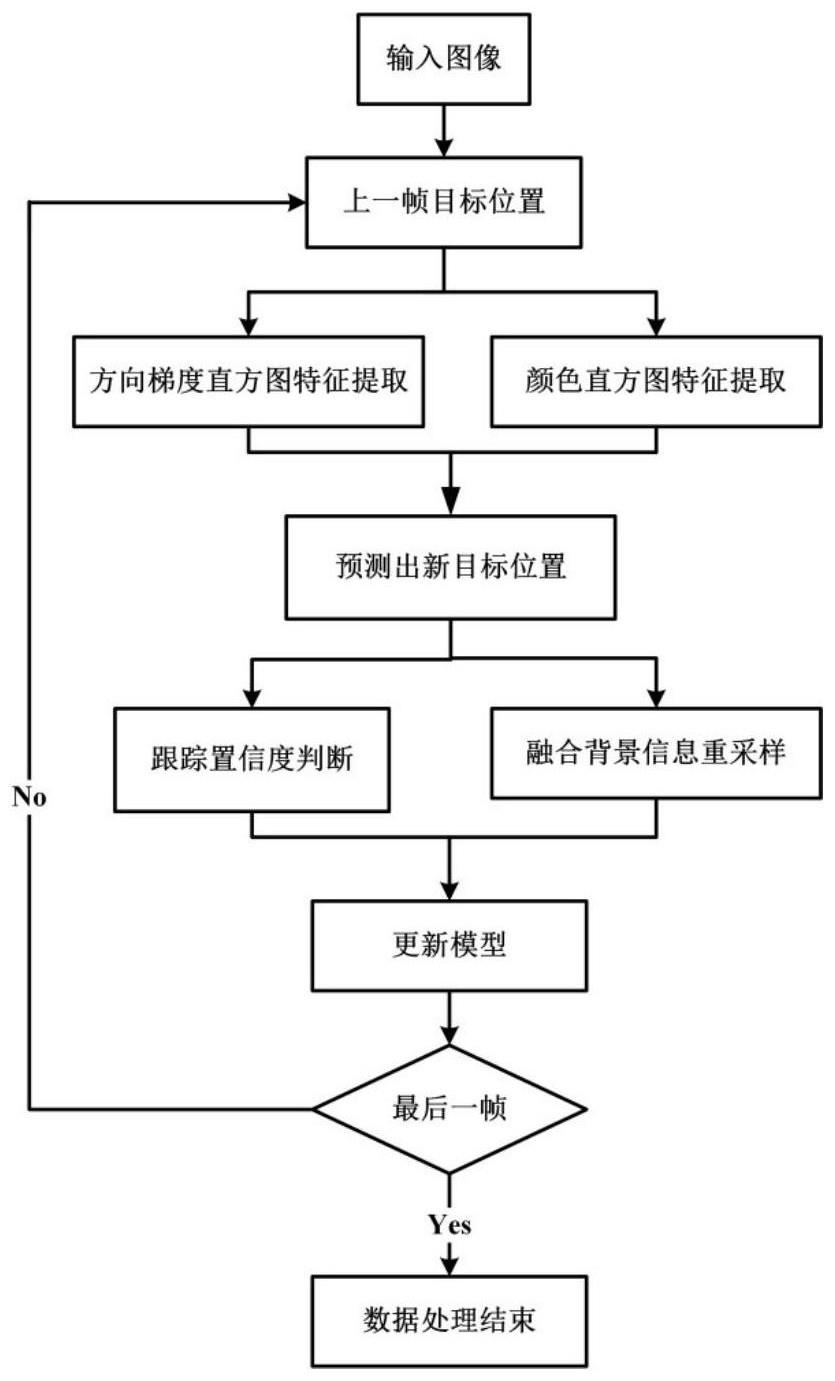
3、步骤1:采集待跟踪的图像序列,并根据目标初始坐标以及目标尺寸进行初始化操作;
4、步骤2:提取当前帧目标以及目标周围区域的特征信息,所述特征信息包括方向梯度直方图特征以及颜色梯度直方图特征;
5、步骤3:将特征信息输入相关滤波模型对滤波模型进行训练;
6、步骤4:按照步骤2的方法提取下一帧目标区域的特征信息,并利用上一帧训练的滤波模型生成特征响应值;
7、步骤5:将下一帧的方向梯度直方图以及颜色梯度直方图的特征响应值进行自适应融合;
8、步骤6:根据融合后的特征响应值确认目标坐标;
9、步骤7:根据融合后的特征响应值计算峰值旁瓣值以及平均峰值能量比,从而确认模型更新参数;
10、步骤8:返回步骤2,直到提取完图像序列中的所有图像。
11、优选地,步骤3对滤波模型进行训练的具体过程表述为:
12、
13、其中,x0表示目标区域构成的循环矩阵,y表示样本的回归值,w表示相关滤波模型,xi表示目标周围区域构成的循环矩阵,λ1和λ2表示正则化参数,k表示选取的目标周围区域个数。
14、优选地,步骤3训练得到的滤波模型为:
15、
16、式中,为频域下的目标矩阵,为频域下的样本回归值,为频域下的背景矩阵,是的共轭矩阵,是的共轭矩阵。
17、优选地,步骤5中将方向梯度直方图以及颜色梯度直方图的特征响应值进行自适应融合的具体公式为:
18、f(x)=γhfh(x)+γcfc(x)
19、其中,γh是方向梯度直方图特征响应值的加权因子,γc是颜色直方图特征响应值的加权因子,fh(x)、fc(x)以及f(x)分别表示方向梯度直方图特征的响应值、颜色直方图特征的响应值以及融合后的特征响应值。
20、优选地,方向梯度直方图特征响应值的加权因子和颜色直方图特征响应值的加权因子分别具体为:
21、
22、式中,表示方向梯度直方图特征在第i帧的近似归一化最大响应值,表示颜色直方图特征在第i帧的近似归一化最大响应值。
23、优选地,步骤7中平均峰值能量比的具体公式如下:
24、
25、其中,fmax和fmin分别表示响应图中的最大响应值和最小响应值,fx,y则表示(x,y)位置处的响应值,apce为平均峰值能量比;
26、峰值旁瓣值的具体公式如下:
27、
28、其中,gmax表示跟踪结果的最大峰值,us1和σs1则分别表示最大峰值周围区域的旁瓣均值以及方差,psr表示峰值旁瓣值;
29、根据平均峰值能量比和峰值旁瓣值的结果自适应改变模型的更新系数,具体公式如下,
30、
31、其中,x*和w*分别表示当前帧的图像特征以及训练后的新模型参数,winit表示初始的模型参数,psravg和apceavg分别表示峰值旁瓣值的历史平均值和平均峰值能量比的历史平均值。
32、本发明与现有技术相比,其显著优点为:
33、(1)本发明引入了一种上下文感知框架,通过在模型训练阶段添加目标周围区域的背景信息来解决传统算法中滤波模型学习到的背景信息过少的问题;
34、(2)本发明自适应融合方向梯度直方图特征以及颜色直方图特征,解决了单一特征无法准确描述目标和固定融合系数不能适应场景变化的问题;
35、(3)本发明引入了峰值旁瓣值以及平均峰值能量比对跟踪结果的可信度进行判断,并根据判断结果自适应地调整更新参数,解决传统模型更新策略中固定学习因子容易造成模型污染的问题。
36、下面结合附图对本发明做进一步详细的描述。
- 还没有人留言评论。精彩留言会获得点赞!