基于人工智能的摄像机实时跟踪定位方法与流程
本发明涉及图像数据处理,具体涉及一种基于人工智能的摄像机实时跟踪定位方法。
背景技术:
1、摄像机实时跟踪定位方法是一种利用计算机视觉技术,通过对物体在视频中的运动轨迹进行分析和推断,实现物体实时跟踪和定位的技术。通过摄像机实时跟踪定位,可精确地定位和跟踪物体的位置等信息,在监控、运动控制、导航、测量等领域应用广泛,同时,可提升工作效率、增强客户体验。
2、现阶段,摄像机实时跟踪定位技术已经得到了广泛的应用,并不断得到改进和优化,目前可以借助图像处理和机器学习等传统算法通过摄像机实现对物体的实时跟踪定位,由于算法成熟、消耗计算资源较少、容易获得训练数据等优势,使得根据视频的相邻两帧图像通过匹配实现摄像机实时跟踪定位的准确度较高,但实际中还存在一些挑战和限制,即匹配过程一般为单一特征匹配,所以当需要跟踪定位的物体本身较为复杂或者处于较为复杂的场景中时,相邻两帧图像匹配会不准确,导致对物体的实时跟踪定位不准确。
技术实现思路
1、为了解决相邻两帧图像匹配不准确,导致对物体的实时跟踪定位不准确的技术问题,本发明的目的在于提供一种基于人工智能的摄像机实时跟踪定位方法,所采用的技术方案具体如下:
2、本发明提出了一种基于人工智能的摄像机实时跟踪定位方法,方法包括:
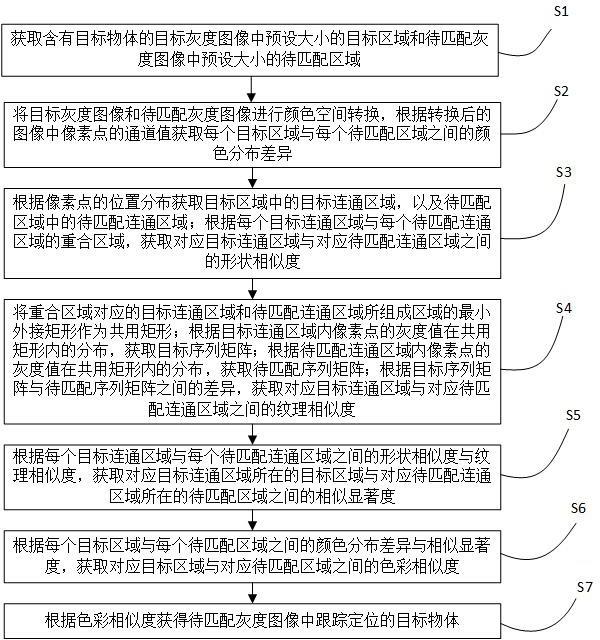
3、获取含有目标物体的目标灰度图像中预设大小的目标区域和待匹配灰度图像中预设大小的待匹配区域;
4、将目标灰度图像和待匹配灰度图像进行颜色空间转换,根据转换后的图像中像素点的通道值获取每个目标区域与每个待匹配区域之间的颜色分布差异;
5、根据像素点的位置分布获取目标区域中的目标连通区域,以及待匹配区域中的待匹配连通区域;根据每个目标连通区域与每个待匹配连通区域的重合区域,获取对应目标连通区域与对应待匹配连通区域之间的形状相似度;
6、将重合区域对应的目标连通区域和待匹配连通区域所组成区域的最小外接矩形作为共用矩形;根据目标连通区域内像素点的灰度值在共用矩形内的分布,获取目标序列矩阵;根据待匹配连通区域内像素点的灰度值在共用矩形内的分布,获取待匹配序列矩阵;根据目标序列矩阵与待匹配序列矩阵之间的差异,获取对应目标连通区域与对应待匹配连通区域之间的纹理相似度;
7、根据每个目标连通区域与每个待匹配连通区域之间的形状相似度与纹理相似度,获取对应目标连通区域所在的目标区域与对应待匹配连通区域所在的待匹配区域之间的相似显著度;
8、根据每个目标区域与每个待匹配区域之间的颜色分布差异与相似显著度,获取对应目标区域与对应待匹配区域之间的色彩相似度;
9、根据色彩相似度获得待匹配灰度图像中跟踪定位的目标物体。
10、进一步地,所述根据转换后的图像中像素点的通道值获取每个目标区域与每个待匹配区域之间的颜色分布差异的方法,包括:
11、将颜色空间下的每个颜色通道内的颜色范围均分为预设等份,获取不同颜色范围的颜色空间,根据每个颜色空间依次获取的顺序进行标号;
12、获取每个目标区域与每个待匹配区域内的每个像素点在每个颜色通道下的通道值,确定每个目标区域与每个待匹配区域内的每个像素点的颜色空间的标号,构成每个目标区域对应的目标颜色空间分布矩阵和每个待匹配区域对应的待匹配颜色空间分布矩阵;
13、根据每个目标颜色空间分布矩阵,获取对应目标区域的颜色聚合向量作为目标颜色聚合向量;
14、根据每个待匹配颜色空间分布矩阵,获取对应待匹配区域的颜色聚合向量作为待匹配颜色聚合向量;
15、当所述目标颜色聚合向量与所述待匹配颜色聚合向量的维度相同时,获取所述目标颜色聚合向量与所述待匹配颜色聚合向量的差的模进行归一化的结果,作为对应目标区域与对应待匹配区域之间的颜色分布差异;
16、当所述目标颜色聚合向量与所述待匹配颜色聚合向量的维度不相同时,获取目标颜色空间分布矩阵与待匹配颜色空间分布矩阵相同位置对应标号之间的差异进行累加的结果作为第一结果,将归一化的第一结果作为对应目标区域与对应待匹配区域之间的颜色分布差异。
17、进一步地,所述目标连通区域和待匹配连通区域的获取方法,包括:
18、将目标区域中的聚合像素点对应的区域作为目标连通区域;
19、将待匹配区域中的聚合像素点对应的区域作为待匹配连通区域。
20、进一步地,所述形状相似度的获取方法,包括:
21、将每个目标连通区域与每个待匹配连通区域的质心重合,获取对应目标连通区域与对应待匹配连通区域之间的重合区域;
22、任选一个重合区域作为参考重合区域,将参考重合区域中像素点数量进行归一化的结果,作为参考重合区域对应的目标连通区域与待匹配连通区域之间的形状相似度。
23、进一步地,所述目标序列矩阵和待匹配序列矩阵的获取方法,包括:
24、将每个连通区域内的每个像素点的census序列,根据每个连通区域内每个像素点在共用矩形内的位置,获取每个连通区域内每个像素点的census序列构成的对应连通区域的序列矩阵;
25、将目标连通区域的序列矩阵作为目标序列矩阵;
26、将待匹配连通区域的序列矩阵作为待匹配序列矩阵。
27、进一步地,所述纹理相似度的获取方法,包括:
28、获取任一个census序列的字符串长度作为序列长度;
29、将同一个共用矩形对应的目标序列矩阵与待匹配序列矩阵作为一个匹配对;
30、任选一个匹配对作为目标匹配对,获取目标匹配对的目标序列矩阵或待匹配序列矩阵的行数和列数分别作为目标行数与目标列数;
31、获取目标匹配对的目标序列矩阵与待匹配序列矩阵中同一位置的census序列的汉明距离作为目标汉明距离;
32、将序列长度与每个目标汉明距离的差异进行累加的结果作为第一结果,将归一化的第一结果作为目标匹配对的目标序列矩阵对应的目标连通区域与待匹配序列矩阵对应的待匹配连通区域之间的纹理相似度。
33、进一步地,所述相似显著度获取方法,包括:
34、任选一个目标连通区域作为参考目标连通区域,任选一个待匹配连通区域作为参考待匹配连通区域;
35、将参考目标连通区域所在的目标区域作为参考目标区域,将参考待匹配连通区域所在的待匹配区域作为参考待匹配区域;
36、将参考目标连通区域与参考待匹配连通区域之间的形状相似度与纹理相似度的乘积,作为参考目标连通区域与参考待匹配连通区域之间的一致相似度;
37、获取参考目标连通区域与参考待匹配区域中每个待匹配连通区域之间的一致相似度,将最大的一致相似度,作为参考目标连通区域与参考待匹配区域的纹理一致值;
38、获取参考目标区域中的每个目标连通区域与参考待匹配区域的纹理一致值,将纹理一致值的均值,作为参考目标区域与参考待匹配区域之间的相似显著度。
39、进一步地,所述色彩相似度的获取方法,包括:
40、将每个颜色分布差异进行负相关映射的结果作为颜色相似度;
41、将每个目标区域与每个待匹配区域之间的颜色相似度与相似显著度的乘积进行归一化的结果,作为对应目标区域与对应待匹配区域之间的色彩相似度。
42、进一步地,所述根据色彩相似度获得待匹配灰度图像中跟踪定位的目标物体的方法,包括:
43、通过柔性模板匹配算法根据色彩相似度,对每个目标区域和每个待匹配区域进行匹配,获取待匹配灰度图像中进行跟踪定位的目标物体。
44、进一步地,所述将目标灰度图像和待匹配灰度图像进行颜色空间转换的方法,包括:
45、将所述目标灰度图像和所述待匹配灰度图像转换至lab颜色空间中。
46、本发明具有如下有益效果:
47、将目标灰度图像和待匹配灰度图像进行颜色空间转换,更能清晰的获取目标灰度图像和待匹配灰度图像中的颜色空间,进而准确的根据像素点的通道值获取每个目标区域与每个待匹配区域之间的颜色分布差异;获取目标区域中的目标连通区域,以及待匹配区域中的待匹配连通区域,对目标连通区域和待匹配连通区域进行分析,更能准确的将目标区域与待匹配区域进行匹配;获取每个目标连通区域与每个待匹配连通区域的重合区域,根据重合区域的大小和对应目标连通区域与待匹配连通区域内的像素点的灰度值,获取目标连通区域与待匹配连通区域之间的形状相似度和纹理相似度,进而获取对应目标区域与对应待匹配区域之间的相似显著度,避免目标区域与待匹配区域内的颜色复杂,导致目标区域与待匹配区域之间的匹配不准确的问题;根据每个目标区域与每个待匹配区域之间的颜色分布差异与相似显著度获取对应目标区域与对应待匹配区域之间的色彩相似度,解决了对于复杂图像中目标物体的定位由单一特征进行匹配不准确的问题,使得每个目标区域与每个待匹配区域之间的匹配更准确高效;进而根据色彩相似度获得待匹配灰度图像中跟踪定位的目标物体,使得待匹配灰度图像中的目标物体匹配的更准确。
- 还没有人留言评论。精彩留言会获得点赞!