一种用于仿真的角焊建模方法、设备及存储介质与流程
本发明属于角焊仿真建模,具体涉及一种用于仿真的角焊建模方法、设备及存储介质。
背景技术:
1、在整车开发中,需要对被动安全性能进行仿真计算,判断车身结构及连接是否满足要求。车身的几百个结构是通过焊接、粘接等方式进行连接;目前,主流仿真软件的点焊、粘胶等连接形式的建模已经实现自动化;但是,角焊(如防撞梁与吸能盒之间,吸能盒与连接板之间)的仿真建模仍然需要通过人工进行逐一建模,存在建模效率低、建模精度差、易出错等问题。
技术实现思路
1、为了克服上述问题,本发明提供一种用于仿真的角焊建模方法、设备及存储介质;能够实现角焊有限元模型的自动建模和角焊焊点坐标的精确计算。
2、一种用于仿真的角焊建模方法,包括如下内容:
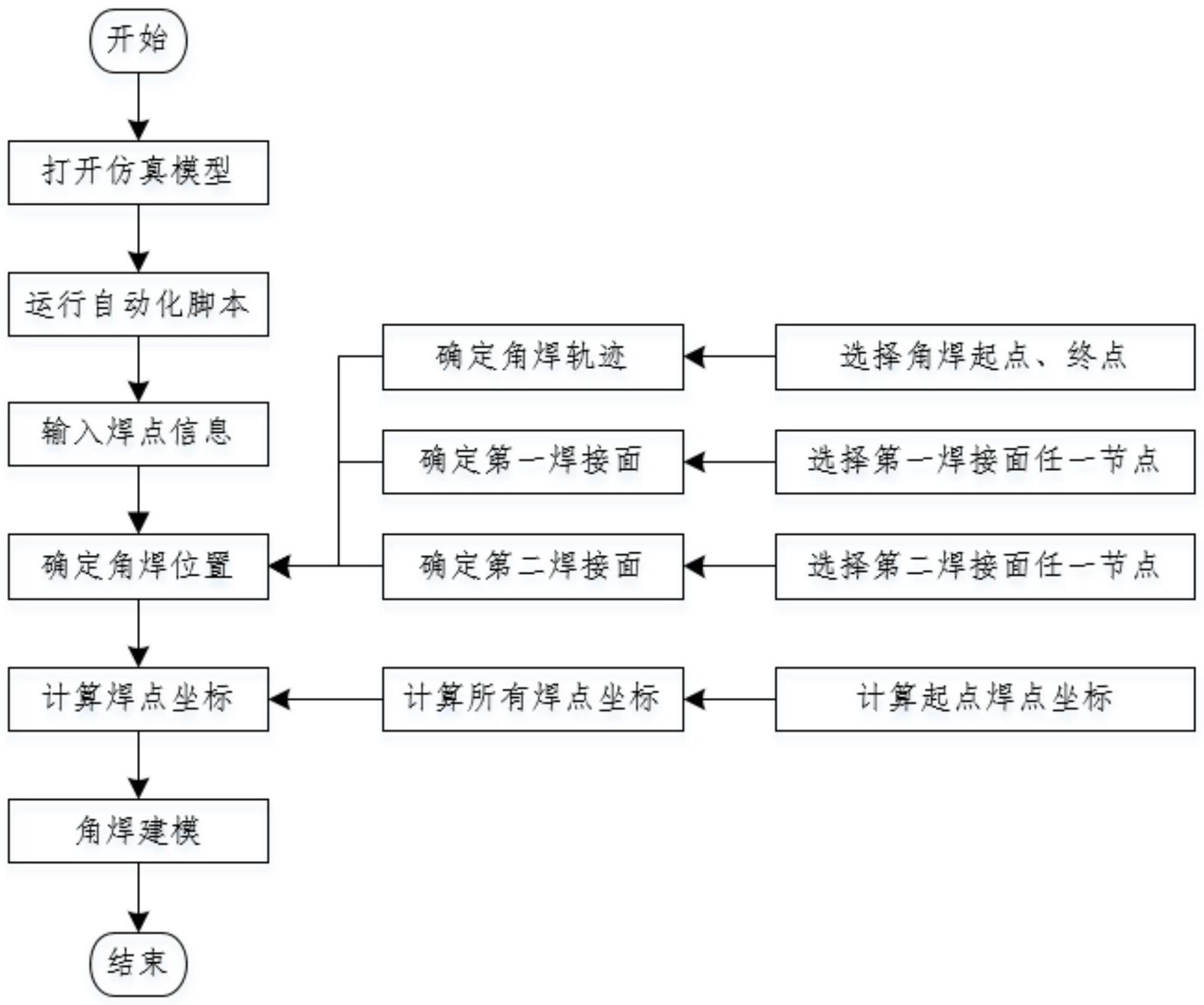
3、第一步,打开仿真模型
4、在primer软件中,选择并打开仿真模型;
5、第二步,运行自动化脚本;步骤如下:
6、2.1在primer软件中,打开script窗口;
7、2.2选择自动化脚本并运行自动化脚本;
8、第三步,输入焊点信息,并定义焊点的尺寸信息,步骤如下:
9、3.1在自动化脚本中的1.length(mm)后的文本框中输入焊点长度;
10、3.2在自动化脚本中的2.height(mm)后的文本框中输入焊点高度;
11、第四步,确定角焊位置;该步骤通过选择4个节点确定焊缝位置及焊接母材信息,其中焊接母材信息是指两个焊接面,步骤如下:
12、4.1单击自动化脚本中的3.path(a-b-c-d)后的select按键,依次选择4个节点a、b、c、d;
13、4.2节点a表示角焊起点,节点b表示角焊终点,读取节点a、b的坐标即能够确定角焊轨迹,角焊轨迹即为a、b连点间的连线;
14、4.3在第一焊接面上选取节点c,读取节点c所在的part即确定第一焊接面;
15、4.4在第二焊接面上选取节点d,读取节点d所在的part即确定第二焊接面;
16、第五步,通过节点a、b、c、d的空间坐标及焊点长度、高度进行求解计算焊点坐标;
17、第六步,角焊建模;角焊所有焊点的焊点节点坐标已完成求解,将坐标输入primer软件中,实现角焊建模自动化,方法如下:
18、6.1建立角焊所在part,记为part_sw;
19、6.2建立角焊所有焊点;
20、6.3建立角焊与焊接面之间的接触。
21、所述第四步中节点a、b、c、d的选择顺序为节点d位于节点a、b、c的右手法则正方向。
22、所述第五步中焊点坐标的计算过程如下:
23、首先计算角焊起点即节点a处的焊点节点坐标;然后,通过循环计算角焊轨迹上所有焊点坐标;具体内容如下:
24、假设角焊起点处焊点的焊点节点及坐标分别为l1(xl1,yl1,zl1)、m1(xm1,ym1,zm1)、n1(xn1,yn1,zn1)、o1(xo1,yo1,zo1)、p1(xp1,yp1,zp1)、q1(xq1,yq1,zq1),假设a、b、c、d四个节点的坐标分别为a(xa,ya,za)、b(xb,yb,zb)、c(xc,yc,zc)、d(xd,yd,zd);
25、所述m1(xm1,ym1,zm1)求解方法如下:
26、角焊实际的起点、终点不会与节点a、b重合,角焊实际起点与节点a之间、角焊实际终点与节点b之间会保留一部分间隙,间隙长度记为blank;
27、长度上,ab=blank*2+length*n+interval*(n-1);其中,焊点之间的间隙为0,即interval=0;则有ab=blank*2+length*n;其中ab为a、b两个节点连线的线段长度,length为单个焊点的长度,n为角焊内的焊点个数,n=[ab/length],[]为取整符号;blank=(ab–length*n)/2;
28、则m1的x坐标xm1=xa+(xb–xa)*blank/ab,m1的y坐标ym1=ya+(yb–ya)*blank/ab,m1的z坐标zm1=za+(zb–za)*blank/ab;
29、所述l1(xl1,yl1,zl1)求解方法如下:
30、线段l1m1为焊点的高度,即l1m1=length,有以下方程:
31、(xl1-xm1)2 + (yl1-ym1)2 + (zl1-zm1)2 = length2 (1)
32、l1m1⊥ab,及线段l1m1、ab的法向量的数量积为0,有以下方程:
33、(xm1-xl1)(xb-xa) + (ym1-yl1)(yb-ya) + (zm1-zl1)(zb-za) = 0 (2)
34、点a、b、c、l1共平面,即平面abc与平面abl1重合,设平面abc、平面abl1的平面方程分别为a1x+b1y+c1z+d1=0、a2x+b2y+c2z+d2=0,则平面abc、平面abl1的法向量分别为(a1,b1,c1)、(a2,b2,c2),d1和d2为常量,有以下方程:
35、a1/a2 = b1/b2 = c1/c2 = d1/d2 (3)
36、综合方程(1)、(2)、(3),求得l1坐标(xl1,yl1,zl1);同l1坐标求解方法相同,求得n1坐标(xn1,yn1,zn1);
37、所述o1(xo1,yo1,zo1)、p1(xp1,yp1,zp1)、q1(xq1,yq1,zq1)的求解方法如下:
38、线段l1o1与ab平行,则o1的x坐标xo1=xl1+(xb–xa)*blank/ab,o1的y坐标yo1=yl1+(yb–ya)*blank/ab,o1的z坐标zo1=zl1+
39、(zb–za)*blank/ab;
40、线段m1p1与ab平行,则p1的x坐标xp1=xm1+(xb–xa)*blank/ab,p1的y坐标yp1=ym1+(yb–ya)*blank/ab,p1的z坐标
41、zp1=zm1+(zb–za)*blank/ab;
42、n1q1与ab平行,则q1的x坐标xq1=xn1+(xb–xa)*blank/ab,q1的y坐标yq1=yn1+(yb–ya)*blank/ab,q1的z坐标zq1=zn1+(zb–za)*blank/ab;
43、通过循环计算角焊轨迹上所有焊点坐标,假设任一焊点x的6个节点分别为:lx(xlx,ylx,zlx)、mx(xmx,ymx,zmx)、nx(xnx,ynx,znx)、ox(xox,yox,zox)、px(xpx,ypx,zpx)、qx(xqx,yqx,zqx),坐标求解方法如下:
44、lx的x坐标xlx=xm1+(x–1)*length/ab,lx的y坐标ymx=yl1+(x–1)*length/ab,lx的z坐标zlx=zm1+(x–1)*length/ab;
45、mx的x坐标xmx=xm1+(x–1)*length/ab,mx的y坐标ymx=
46、ym1+(x–1)*length/ab,mx的z坐标zmx=zm1+(x–1)*length/ab;
47、nx的x坐标xnx=xn1+(x–1)*length/ab,nx的y坐标ynx=yn1+
48、(x–1)*length/ab,nx的z坐标znx=zn1+(x–1)*length/ab;
49、ox的x坐标xox=xo1+(x–1)*length/ab,ox的y坐标yox=
50、yo1+(x–1)*length/ab,ox的z坐标zox=zo1+(x–1)*length/ab;
51、px的x坐标xpx=xp1+(x–1)*length/ab,px的y坐标
52、ypx=yp1+(x–1)*length/ab,px的z坐标zpx=zp1+(x–1)*length/ab;
53、qx的x坐标xqx=xq1+(x–1)*length/ab,qx的y坐标
54、yqx=yq1+(x–1)*length/ab,qx的z坐标zqx=zq1+(x–1)*length/ab。
55、所述坐标求解过程通过matlab软件实现。
56、所述第六步中步骤6.1使用primer_js_api的var part_sw=new part(model[model],pid[integer],secid[integer/string],mid[integer/string],heading(optional)[string])函数建立角焊所在part。
57、所述第六步中步骤6.2建立角焊所有焊点过程如下:
58、使用primer_js_api的new node(model[model],nid[integer],x[real],y[real],z[real],tc(optional)[integer],rc(optional)[integer])函数建立节点lx、mx、nx、ox、px、qx;使用primer_js_api的var swx=new solid(model[model],eid[integer],pid[integer],n1[integer],n2[integer],n3[integer],n4[integer],n5(optional)[integer],n6(optional)[integer]函数建立以lx、mx、nx、ox、px、qx为顶点的五面体,将pid设置为part_sw的id,即将该焊点放入角焊所在part;基于以上任一焊点的建模方法,通过循环即实现角焊所有焊点的建模。
59、所述第六步中步骤6.3建立角焊与焊接面之间的接触过程如下:
60、使用primer_js_api的new contact(model[model],type[string],id(optional)[integer],heading(optional)[string])函数建立角焊与焊接面之间的接触。
61、本发明的有益效果:
62、本发明可以实现角焊有限元模型的自动建模。
63、本发明可以实现角焊焊点坐标的精确计算。
64、本发明可以实现角焊建模、焊点坐标计算自动化,优化了建模流程,提升了建模效率与精度。
- 还没有人留言评论。精彩留言会获得点赞!