一种城市污水处理过程时滞鲁棒优化控制方法
本发明针对城市污水处理过程存在的时滞特性,提出了一种时滞鲁棒优化控制方法,克服了生化反应物浓度测量的时滞偏差影响,增强了溶解氧与硝态氮优化设定值的鲁棒性,获得了更加精确的跟踪控制效果,在保证出水水质的同时降低了运行能耗,控制出水水质和运行能耗是城市污水处理厂运行优化的核心目标,对城市污水处理过程的高效稳定运行具有重要意义,既属于智能优化控制领域,又属于水处理领域。
背景技术:
1、随着城市人口的不断增多,淡水资源的需求量不断增加,城市生活污水处理问题日益凸显。为了应对水资源短缺和水环境污染的问题,国务院颁布的《水污染防治行动计划》等文件鼓励并支持水污染防治的科学技术研究和先进适用技术的推广应用。城市污水处理可以净化水质,改善生态环境,促进水资源循环,对城市的发展具有重要意义。提高出水质量和降低运行能耗是城市污水处理厂运行优化的核心目标,对保护城市环境和提升污水处理厂的社会效益具有重要影响。因此,城市污水处理过程出水水质与运行能耗的优化控制研究具有广阔的应用前景。
2、随着城市污水处理优化控制技术的不断提升,污水中的有机污染物得到了有效遏制。然而,由于反应物浓度变化在污水处理过程中存在时间滞后性,使得对其的测量存在偏差,进而造成了优化目标模型的不确定性,难以实现精确的在线优化控制,常常发生出水水质超标和运行能耗过高的现象,给城市环境和污水处理厂都带来了较重的负担。因此,在污水处理过程时滞特性的影响下,增强溶解氧和硝态氮优化设定值的鲁棒性,稳定地保证出水水质的同时降低运行能耗,是一个重要的研究课题。
3、本发明设计了一种城市污水处理过程时滞鲁棒优化控制方法,主要通过分析城市污水处理过程的特性,建立了出水水质与运行能耗的时滞多目标优化模型,设计了鲁棒进化算法对模型进行求解,获得鲁棒性较强的溶解氧和硝态氮期望设定值,并控制过程变量跟踪该设定值,克服了污水处理过程中时滞扰动的影响,在保证出水水质的同时降低了运行能耗,实现了污水处理过程高效稳定运行。
技术实现思路
1、本发明设计了一种城市污水处理过程时滞鲁棒优化控制方法,该方法结合数据驱动建模方法与时滞补偿方法,建立了城市污水处理过程出水水质与运行能耗的时滞多目标优化模型,通过设计时滞鲁棒进化优化算法来求解鲁棒性强的溶解氧和硝态氮设定值,并利用比例积分微分控制器来实时跟踪过程变量的期望优化设定值,克服了污水处理过程生化反应端与出水端的时滞扰动所带来的不确定性,有效提升了污水处理过程的出水水质并降低了运行能耗。
2、本发明采用了如下的技术方案及实现步骤:
3、1.一种城市污水处理过程时滞鲁棒优化控制方法,具体包括以下步骤:
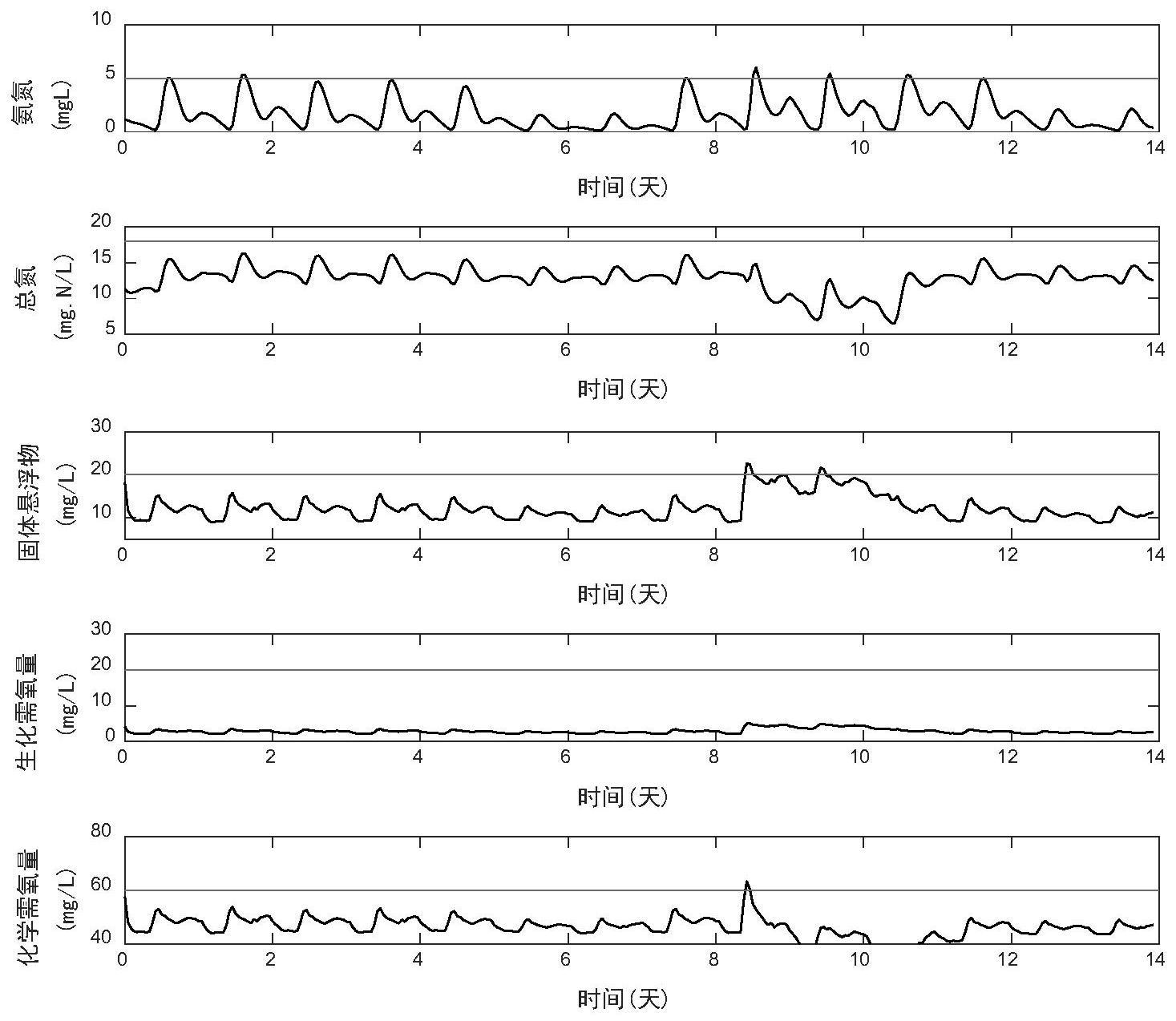
4、(1)采集关键过程变量数据:选取好氧反应器中的溶解氧浓度、缺氧反应器中的硝态氮浓度、出水中的氨氮浓度、出水中的总氮浓度、出水中的总悬浮物浓度、出水中的生物需氧量浓度和出水中的化学需氧量浓度7个变量作为关键过程变量;在t时刻利用传感器采集关键过程变量数据为:
5、s(t)=[so(t),sno(t),senh(t),setn(t),setss(t),sebod(t),secod(t)] (1)
6、其中,s(t)为t时刻的关键变量向量,so(t)为t时刻好氧反应器中的溶解氧浓度,单位mg/l,sno(t)为t时刻缺氧反应器中的硝态氮浓度,单位mg/l,senh(t)为t时刻出水中的氨氮浓度,单位mg/l,setn(t)为t时刻出水中的总氮浓度,单位mg/l,setss(t)为t时刻出水中的总悬浮物浓度,单位mg/l,sebod(t)为t时刻的生物需氧量,单位mg/l,secod(t)为t时刻的化学需氧量,单位mg/l;
7、(2)建立城市污水处理过程时滞鲁棒多目标优化模型:利用核函数建立包括出水水质优化模型、运行能耗优化模型和时滞鲁棒补偿模型在内的城市污水处理过程时滞鲁棒多目标优化模型,表达关键过程变量与出水水质、运行能耗之间的关系;
8、①建立出水水质优化模型:
9、
10、其中,jeq(x(t))为t时刻的出水水质优化模型,x(t)=[so(t),sno(t)]为t时刻jeq(x(t))的输入向量,δeq,k(t)为t时刻jeq(x(t))的第k个权值且取值范围为[-10,10],ceq,k(t)=[ceq,k,1(t),ceq,k,2(t)]为t时刻jeq(x(t))的第k个中心向量,ceq,k,1(t)为ceq,k(t)的第一个分量且取值范围为[-5,5],ceq,k,2(t)为ceq,k(t)的第二个分量且取值范围为[-5,5],beq,k(t)为t时刻jeq(x(t))的第k个宽度且取值范围为[0,3];
11、②建立运行能耗优化模型:
12、
13、其中,jec(x(t))为t时刻的运行能耗优化模型,x(t)=[so(t),sno(t)]为t时刻jec(x(t))的输入向量,δec,k(t)为t时刻jec(x(t))的第k个权值且取值范围为[-10,10],cec,k(t)=[cec,k,1(t),cec,k,2(t)]为t时刻jec(x(t))的第k个中心向量,cec,k,1(t)为cec,k(t)的第一个分量且取值范围为[-5,5],cec,k,2(t)为cec,k(t)的第二个分量且取值范围为[-5,5],bec,k(t)为t时刻jec(x(t))的第k个宽度且取值范围为[0,3];
14、③建立时滞鲁棒补偿模型:
15、
16、其中,ε(xτ(t))为t时刻的时滞鲁棒补偿模型,xτ(t)=[so(t-τdo),sno(t-τno)]为t时刻ε(xτ(t))的输入向量,τdo=0.5(τdo,low+τdo,up)为好氧反应器中溶解氧相对于出水端的时滞,τdo,low=vs/qin为τdo的下界,vs为二沉池的容积,qin为入水体积,τdo,up=(vs+vo)/qin为τdo的上界,vo为好氧反应器的容积,so(t-τdo)为t-τdo时刻好氧反应器中的溶解氧浓度且取值范围为[0,3],单位mg/l;sno(t-τno)为t-τno时刻好氧反应器中的硝态氮浓度且取值范围为[0,2],单位mg/l,τno=0.5(τdo,low+τdo,up)为缺氧反应器中硝态氮相对于出水端的时滞,τno,low=(vs+3vo)/qin为τno的下界,τno,up=(vs+va+3vo)/qin为τno的上界,va为缺氧反应器的容积;δε,k(t)为t时刻ε(xτ(t))的第k个权值且取值范围为[-10,10],cε,k(t)=[cε,k,1(t),cε,k,2(t)]为t时刻ε(xτ(t))的第k个中心向量,cε,k,1(t)为cε,k(t)的第一个分量且取值范围为[-5,5],cε,k,2(t)为cε,k(t)的第二个分量且取值范围为[-5,5],bε,k(t)为t时刻ε(xτ(t))的第k个宽度且取值范围为[0,3];
17、④对jeq(x(t))、jec(x(t))和ε(xτ(t))中的参数进行实时更新:
18、
19、
20、
21、
22、
23、
24、
25、
26、
27、其中,δeq(t)=[δeq,1(t),δeq,2(t),…,δeq,5(t)]为t时刻jeq(x(t))的权值向量,δec(t)=[δec,1(t),δec,2(t),…,δec,5(t)]为t时刻jec(x(t))的权值向量,δε(t)=[δε,1(t),δε,2(t),…,δε,5(t)]为t时刻ε(xτ(t))的权值向量,ceq(t)=[ceq,1(t),ceq,2(t),…,ceq,5(t)]为t时刻jeq(x(t))的中心向量,cec(t)=[cec,1(t),cec,2(t),…,cec,5(t)]为t时刻jec(x(t))的中心向量,cε(t)=[cε,1(t),cε,2(t),…,cε,5(t)]为t时刻ε(xτ(t))的中心向量,beq(t)=[beq,1(t),beq,2(t),…,beq,5(t)]为t时刻jeq(x(t))的宽度向量,bec(t)=[bec,1(t),bec,2(t),…,bec,5(t)]为jec(x(t))t时刻的宽度向量,bε(t)=[bε,1(t),bε,2(t),…,bε,5(t)]为t时刻ε(xτ(t))的宽度向量,δeq(t+1)=[δeq,1(t+1),δeq,2(t+1),…,δeq,5(t+1)]为t+1时刻jeq(x(t+1))的权值向量,δec(t+1)=[δec,1(t+1),δec,2(t+1),…,δec,5(t+1)]为t+1时刻jec(x(t+1))的权值向量,δε(t+1)=[δε,1(t+1),δε,2(t+1),…,δε,5(t+1)]为t+1时刻ε(xτ(t+1))的权值向量,ceq(t+1)=[ceq,1(t+1),ceq,2(t+1),…,ceq,5(t+1)]为t+1时刻jeq(x(t+1))的中心向量,cec(t+1)=[cec,1(t+1),cec,2(t+1),…,cec,5(t+1)]为t+1时刻jec(x(t+1))的中心向量,cε(t+1)=[cε,1(t+1),cε,2(t+1),…,cε,5(t+1)]为t+1时刻ε(xτ(t+1))的中心向量,beq(t+1)=[beq,1(t+1),beq,2(t+1),…,beq,5(t+1)]为t+1时刻jeq(x(t+1))的宽度向量,bec(t+1)=[bec,1(t+1),bec,2(t+1),…,bec,5(t+1)]为t+1时刻jec(x(t+1))的宽度向量,bε(t+1)=[bε,1(t+1),bε,2(t+1),…,bε,5(t+1)]为t+1时刻ε(xτ(t+1))的宽度向量;eeq(t)=jeq(x(t))-eq(t)为t时刻的出水水质优化模型训练误差,eq(t)=senh(t)+setn(t)+setss(t)+sebod(t)+secod(t)为t时刻的出水水质采集值,eec(t)=jec(x(t))-ec(t)为t时刻的运行能耗优化模型训练误差,ec(t)为t时刻的运行能耗采集值,eε(t)=eeq(t)-ε(xτ(t))为t时刻的时滞鲁棒补偿模型训练误差;
28、⑤建立城市污水处理过程时滞鲁棒多目标优化函数:
29、
30、其中jeq(x(t))表示决策变量x(t)在t时刻的出水水质优化目标函数值,jec(x(t))表示决策变量x(t)在t时刻的运行能耗优化目标函数值,ε(xτ(t))为决策变量xτ(t)在t时刻的时滞鲁棒补偿值;
31、(3)求解过程变量优化设定值:设计时滞鲁棒进化优化算法求解溶解氧和硝态氮的优化设定值;
32、①设置时滞鲁棒进化优化算法的总迭代次数为κmax=500,粒子群规模为n=100,粒子的位置与速度为:
33、zt,n(κ)=[zt,n,1(κ),zt,n,2(κ)](15)
34、vt,n(κ)=[vt,n,1(κ),vt,n,2(κ)](16)其中zt,n(κ)为t时刻第n个粒子进化到第κ代的位置向量,zt,n,1(κ)为zt,n(κ)的第一个分量表示溶解氧浓度,其取值范围为[0,3],zt,n,2(κ)为zt,n(κ)的第二个分量表示硝态氮浓度,其取值范围为[0,2],vt,n(κ)为t时刻第n个粒子进化到第κ代的速度向量,vt,n,1(κ)为vt,n(κ)的第一个分量且取值范围为[0,0.1],vt,n,2(κ)为vt,n(κ)的第二个分量且取值范围为[0,0.1];
35、②计算每个粒子的个体最优位置与种群的全局最优位置:
36、
37、
38、其中,pt,n(κ+1)为t时刻第n个粒子进化到第κ+1代的个体最优位置,pt,n(κ)为t时刻第n个粒子进化到第κ代的历史个体最优位置,zt,n(κ+1)为t时刻第n个粒子进化到第κ+1代的位置向量,gt(κ+1)为t时刻种群进化到第κ+1代的全局最优位置,gt(κ)为t时刻种群进化到第κ代的全局最优位置,>代表鲁棒支配关系且定义为:
39、
40、
41、其中,jeq(zt,n(κ+1))为决策变量zt,n(κ+1)的出水水质优化目标函数值;jec(zt,n(κ+1))为决策变量zt,n(κ+1)的运行能耗优化目标函数值;ε(zt,n(κ+1))为决策变量zt,n(κ+1)的时滞鲁棒补偿值;jeq(pt,n(κ))为决策变量pt,n(κ)的出水水质优化目标函数值;jec(pt,n(κ))为决策变量pt,n(κ)的运行能耗优化目标函数值;ε(pt,n(κ))为决策变量(pt,n(κ))的时滞鲁棒补偿值;jeq(gt,n(κ))为决策变量gt,n(κ)的出水水质优化目标函数值;jec(gt,n(κ))为决策变量gt,n(κ)的运行能耗优化目标函数值;ε(gt,n(κ))为决策变量(gt,n(κ))的时滞鲁棒补偿值;为时滞鲁棒补偿模型在鲁棒区域中的期望值:
42、
43、ω=(sno,up(t)-sno,low(t))(so,up(t)-so,low(t)) (22)
44、
45、
46、
47、
48、其中,ε(zt,n(κ))为决策变量zt,n(κ)的时滞鲁棒补偿值,sno,up(t)为t时刻sno(t)的上界,sno,low(t)为t时刻sno(t)的下界,so,up(t)为t时刻so(t)的上界,so,low(t)为t时刻so(t)在的下界,ω为鲁棒区域面积,λ为采样时刻;
49、③更新粒子的速度与位置:
50、zt,n(κ+1)=zt,n(κ)+vt,n(κ+1) (27)
51、vt,n(κ+1)=0.7vt,n(κ)+0.5μ1(pt,n(κ)-vt,n(κ))+0.5μ2(gt(κ)-vt,n(κ)) (28)
52、其中,vt,n(κ+1)为t时刻第n个粒子进化到第κ+1代的速度向量,μ1为个体进化随机数且取值范围为[0,1],μ2为种群进化随机数且取值范围为[0,1];
53、④检测进化过程是否达到停止条件:若进化代数κ=500,终止进化过程并跳转步骤⑤,否则,进化代数κ增加1并返回步骤②;
54、⑤从第κmax代的解集zt(κmax)=[zt,1(κmax),zt,2(κmax),…,zt,n(κmax)]中随机选取一个解x*(t)=[s*o(t),s*no(t)]作为溶解氧和硝态氮的优化设定值,其中,s*o(t)为t时刻好氧反应器中的溶解氧优化设定值,s*no(t)为t时刻缺氧反应器中的硝态氮优化设定值;
55、(4)跟踪控制优化设定值:
56、①利用多变量比例-积分-微分控制算法求解对优化设定值x*(t)进行跟踪控制:
57、
58、其中,δu(t)=[δkla(t),δqa(t)]t为t时刻的操作变量矩阵,δkla(t)为t时刻溶解氧传递系数的变化量,δqa(t)为t时刻内循环流量的变化量,kp为比例系数且取值范围为[0,5],hl为积分系数且取值范围为[0,5],hd为微分系数且取值范围为[0,5],e(t)=x*(t)-x(t)为t时刻的控制误差向量;
59、②利用δu(t)调整溶解氧传递系数与内回流量:
60、kla(t+1)=kla(t)+δkla(t) (30)
61、qa(t+1)=qa(t)+δqa(t) (31)
62、其中,kla(t+1)为t+1时刻的溶解氧传递系数,kla(t)为t时刻的溶解氧传递系数,qa(t+1)为t+1时刻的内回流量,qa(t)为t时刻的内回流量;
63、(5)通过上位机将kla(t)与qa(t)的数值传输到可编程逻辑控制器,并通过数模转换器将数字信号传递给变频器,利用变频器调整供氧泵与内回流泵的频率,则溶解氧浓度被调整至s*o(t),硝态氮浓度被调整至s*no(t)。
- 还没有人留言评论。精彩留言会获得点赞!