一种三七最优入挖位姿的建立方法
本发明涉及三七挖掘,具体涉及一种三七最优入挖位姿的建立方法。
背景技术:
1、三七,又名田七,具有化瘀止血、活血定痛的功效,其叶茎与根茎均具有较高的食用、药用价值;随着三七的经济价值与社会效益的越发凸显,三七的种植面积也逐年扩大。目前,三七的收获主要通过人力手工挖掘与辅助机械挖掘:人力手工挖掘需要较大的劳动力,极大的浪费人力物力、增加挖掘成本,且挖掘效率低下、挖掘耗时长,易增加三七的损失;辅助机械挖掘虽然能够显著提高三七的挖掘效率、节省挖掘时间、有效降低挖掘成本与劳动量,但三七的根茎部位于地面以下、且每株三七根茎部存在差异(即根茎部的形状、延伸入土壤层的深度等),辅助机械挖掘难以精准判断地面之下的三七根茎部位置、形状等,且无法根据各株三七根茎部的不同形状、土壤深度进行调节,从而易造成挖掘过程中对三七根茎部的损伤、伤根率高,进而影响三七的食用、药用价值。
技术实现思路
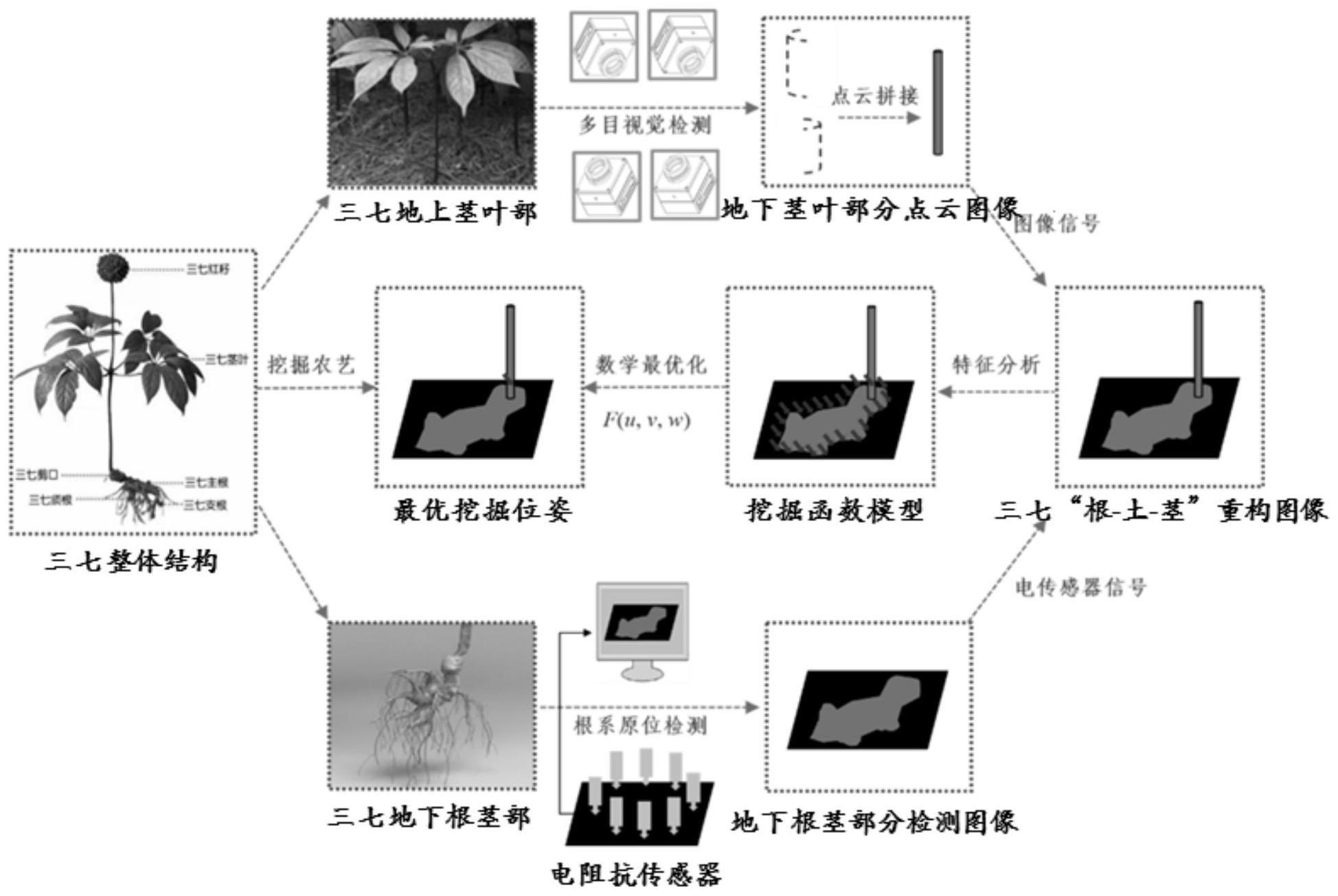
1、针对以上现有技术存在的问题,本发明的目的在于提供一种三七最优入挖位姿的建立方法,该方法通过分别获取三七地上茎叶部分的点云图像与三七低下根茎部分的检测图像,并通过三七地上茎叶部分的点云图像与三七低下根茎部分的检测图像的融合、获得三七“根-土-经”的重构图像,从而获得三七入土挖掘的最优位置与姿态,避免挖掘过程中对三七造成损伤、伤根率较高等问题。
2、本发明的目的通过以下技术方案实现:
3、一种三七最优入挖位姿的建立方法,其特征在于:包括:地上茎叶部分点云图像生成、地下根茎部分检测图像建立、图像重构与最优位姿获取;
4、其中,所述地上茎叶部分点云图像生成具体为:首先,采用两组双目立体视觉相机,从对侧拍摄三七茎叶部(即地上部分)图像,获得两组深度图像;然后,采用改进的迭代最近点(iterative closest point,icp)算法,对两组深度图像中的点云进行拼接,生成地上茎叶部分点云图像;
5、所述地下根茎部分检测图像建立具体为:依据电阻抗检测方法、在三七根茎部(即地下部分)环插多个电阻抗传感器,采用改进的修正牛顿拉普森(modified newtonrapson,mnr)算法,将电阻抗传感器获取的电信号重建为图像信号,建立地下根茎部分检测图像;
6、所述图像重构具体为:以根茎部底部最小坐标所在的平面为土面,对地上茎叶部分点云图像与地下根茎部分检测图像进行融合,获得三七“根-土-茎”重构图像;
7、所述最优位姿获取具体为:以挖掘铲的入土角、边缘点坐标为自变量,挖掘铲消耗能量为因变量,建立挖掘函数模型;通过挖掘函数模型求得使因变量(即挖掘铲消耗能量)最小的自变量(即挖掘铲的入土角、边缘点坐标),从而获得入土挖掘的最优位姿。
8、作为本技术的一种优选方案,所述“采用改进的迭代最近点算法,对两组深度图像中的点云进行拼接”步骤具体为:
9、s01、特征点提取:对于两个待配准的点云,首先从中提取出一些特征点,作为匹配依据,特征点提取具体为:
10、
11、式中:p表示点云中所有点的集合;或表示某个点pi或pj的特征向量;或表示pi或pj点的特征分数;表示被选中的具有显著特征的点集合;
12、s02、稠密点对选取:在进行点云配准时,从特征点集合中选取稠密的点对进行匹配;一般使用基于距离的邻域搜索方法来获取稠密的点对,即假定两组点云中对应点对之间距离的均值方差相等,通过以下方法获取每个点的邻域范围:
13、ni=j|d(pi,qj)≤r;
14、式中:d(pi,qj)表示点pi与qj之间的欧式距离;r表示邻域搜索范围;ni表示与点pi相邻的点的集合;
15、s03、加权平均误差:在将稠密点对配准后、最小化这些点对之间的距离误差,使用加权平均误差衡量配准效果,具体如下:
16、
17、式中:n表示点对的数量;pi、qi′分别表示待配准的两个点云中的对应点对;d(pi,qi′)表示pi与qi′之间的欧式距离;wi表示权重系数、用于调整每个点对的贡献;
18、s04、最小二乘优化:通过最小化加权平均误差,获得两组点云之间的刚性变换;通过采用一个4x4的矩阵表示两组点云的刚性变换,具体为:
19、
20、式中:r表示旋转矩阵,t表示平移向量,它们通过以下逐步迭代公式获得:
21、
22、
23、式中:||·||表示欧式范数,求解过程中进行多次迭代,直至误差趋近于0。
24、作为本技术的一种优选方案,所述“采用改进的修正牛顿拉普森算法,将电阻抗传感器获取的电信号重建为图像信号”具体为:
25、s11、数据采集:采用电阻抗成像技术将待测物体表面(即三七低下根茎部表面)分为若干分离的区域(电极对),从每对电极接口处采集电压值、即电阻抗测量值;
26、s12、数据预处理:对步骤s11中获取的数据进行预处理;
27、s13、求解分布阻抗:首先,利用薄膜法对步骤s12预处理后的电阻抗数据进行重构;之后,通过求解欧姆定律将电阻抗表征为关于介质电导率、几何形状和电极位置的函数,通过欧姆法将其表示为关于介质电阻率的函数;再使用非线性优化算法迭代求解分布阻抗;
28、s14、图像重建:采用改进的mnr算法进行图像重建;
29、s15、数据后处理:对步骤s14中的图像信号进行后处理操作,即得地下根茎部分检测图像。
30、作为本技术的一种优选方案,所述步骤s12中数据预处理包括滤波、去噪处理,从而提高信噪比。
31、作为本技术的一种优选方案,所述步骤s13具体为:
32、利用薄膜法对步骤s12预处理后的电阻抗数据进行重构,具体为:
33、v=hz;
34、式中:h表示总导能矩阵,z表示电阻抗向量至,v表示电势分布向量;矩阵h与向量v均通过薄膜法进行求解,从而获得电势分布图像;
35、之后,通过求解欧姆定律将电阻抗表征为关于介质电导率、几何形状和电极位置的函数,具体为:
36、
37、式中:σ表示电导率,表示电势场分布;
38、通过欧姆法将其表示为关于介质电阻率的函数,具体为:
39、ar=b;
40、式中:r表示电阻率分布向量,a表示测量矩阵,b表示电流分布向量;
41、再使用非线性优化算法迭代求解分布阻抗,具体为:
42、
43、式中:φ表示目标函数,λ表示正则优化参数,c表示形态学正则化算子。
44、作为本技术的一种优选方案,所述步骤s14具体为:
45、s141、对数据进行初始化,设定输入的测试数据为y、初始图像为x0、迭代次数为t、惩罚参数为e;
46、s142、使用sobel算子构建导数算子dx与dy,用于计算图像的梯度信息;
47、s143、对于每个像素点,获取其权重矩阵w,其中,wi,j表示在重建像素点(i,j)处的权重;根据局部加权策略,权重值由该像素点与周围像素点的距离和测量数据之间的距离确定;
48、s144、将图像xi分解成多个尺度xi(1),xi(2),…,xi(s),并计算每个尺度图像的梯度信息gi(1),gi(2),…,gi(s);
49、s145、对每个尺度图像进行梯度计算:
50、
51、s146、通过对图像梯度信息进行加权,平衡平滑效果、保留边缘信息;
52、
53、s147、通过最小化代价函数,更新图像xi:
54、
55、式中:ik表示第k个尺度的测量数据;
56、s148、重复步骤s144~s147,直至达到预先设定的迭代次数或满足收敛条件为止。
57、作为本技术的一种优选方案,所述步骤s15中数据后处理包括去除伪影、增强对比度等。
58、作为本技术的一种优选方案,所述“对地上茎叶部分点云图像与地下根茎部分检测图像进行融合,获得三七“根-土-茎”重构图像”具体为:
59、首先,将地上茎叶部分点云图像与地下根茎部分检测图像分别视为随机变量,通过将地上茎叶部分点云图像与地下根茎部分检测图像进行联合条件概率分布实现融合,具体为:
60、p(x|y)p(y)=p(y|x)p(x);
61、式中:x表示地上茎叶部分点云图像,y表示地下根茎部分检测图像;p(x|y)表示在给定y的情况下、x的概率分布;p(y|x)表示在给定x的情况下、y的概率分布;p(x)、p(y)分别表示x、y的先验概率分布;
62、然后,利用贝叶斯滤波算法来估计地上茎叶部分点云图像的后验概率分布,即:
63、
64、通过将p(y|x)和p(x)进行卷积获得p(x|y)的后概率分布,进而获得融合后的三七“根-土-茎”重构图像。
65、作为本技术的一种优选方案,所述“以挖掘铲的入土角、边缘点坐标为自变量,挖掘铲消耗能量为因变量,建立挖掘函数模型”具体为:
66、首先,设定挖掘铲的入土角为u、边缘点坐标为(v、w),挖掘铲消耗能量为f,则挖掘函数模型为:
67、f(u,v,w)=β0+β1·u+β2·v+β3·w;
68、式中:β0、β1、β2、β3分别表示多元回归系数;
69、其中:
70、
71、式中:a0、a1、a2、a3表示拟合平面系数;(u0,v0,w0)表示平面上一个点的坐标。
72、作为本技术的一种优选方案,所述“通过挖掘函数模型求得使因变量最小的自变量,从而获得入土挖掘的最优位姿”具体为:
73、s21:随机初始化u、v、w的值;
74、s22:分别计算挖掘函数模型的梯度,具体为:
75、
76、式中:xi、yi、zi分别表示对应的输入变量u、v、w的值,u表示对应的输出变量f();
77、s23:进行参数更新,具体为:
78、
79、式中:λ表示学习率,根据实验数据获得;
80、s24:重复进行步骤s22~s23,直至达到收敛条件,输出收敛时u、v、w的作为最优解,即可获得挖掘时的最优入挖位姿。
81、本发明具有如下技术效果:
82、本技术利用两组双目立体视觉相机对三七地上茎叶部分进行图像获取、利用电阻抗传感器对三七地下根茎部分进行图像构建,并通过图像融合,从而获得三七完整的图像,进而有效避免无法获得三七地面以下图像而出现挖掘损伤三七根茎部的问题。在获取三七地上茎叶部分图像时,利用改进的迭代最近点算法,一是使得匹配结果更加准确、能够快速达到收敛状态,二是通过筛选出稀疏点对和稠密点对,降低了数据点的数量,进一步提高计算速度,从而快速获得更加精准的茎叶部点云图像;在建立三七根茎部分图像,利用改进的修正牛顿拉普森算法,减少了冗余的计算、噪声和伪影,从而获得更为清晰的图像信号,确保建立图像的精准性、避免不精确造成入挖过程中的三七根茎部分的损伤,同时具有更强的鲁棒性、稳定性与适应性。此外,本技术还利用挖掘函数模型的建立,通过多次迭代获得最优的入挖位姿,一是有效避免挖掘过程中对于三七的损伤,二是确保挖掘过程中的能量损耗小,从而节省挖掘时间、提高挖掘效率、降低挖掘成本。
- 还没有人留言评论。精彩留言会获得点赞!