芯片引脚外观识别方法、装置、计算机设备及存储介质与流程
本发明涉及半导体检测,更具体地说,涉及一种芯片引脚外观识别方法、装置、计算机设备及存储介质。
背景技术:
1、表面安装技术(surface-mount technology)是一种将电气元件直接安装在印刷电路板(printed circuit board,pcb)表面的方法,被称为表面安装器件(surface-mountdevice)。在工业中,表面安装技术在很大程度上取代了装配部件的通孔技术施工方法。在工业光学检测中,为了准确定位器件的位置和方向,需要区分器件引脚编号。引脚(pin),又叫管脚,是指从集成电路(芯片)内部电路引出与外围电路的接线,所有的引脚就构成了这块芯片的接口。引线末端的一段,通过软钎焊使这一段与印制电路板板上的焊盘共同形成焊点。但随着加工精度的提升,器件尺寸越来越小,使得一号引脚(pin1)外观和其他引脚外观的区别越来越小,从而增加了通过外观差异区分引脚的难度。
技术实现思路
1、1.要解决的技术问题
2、针对现有技术中存在的pin1引脚外观和其他引脚外观区分难度大等问题,本发明提供了一种芯片引脚外观识别方法、装置、计算机设备及存储介质,通过设定pin1引脚的模板图像,将pin1引脚的模板图像与输入引脚图像比较,进而能够快速识别出芯片引脚中的pin1引脚。
3、2.技术方案
4、本发明的目的通过以下技术方案实现。
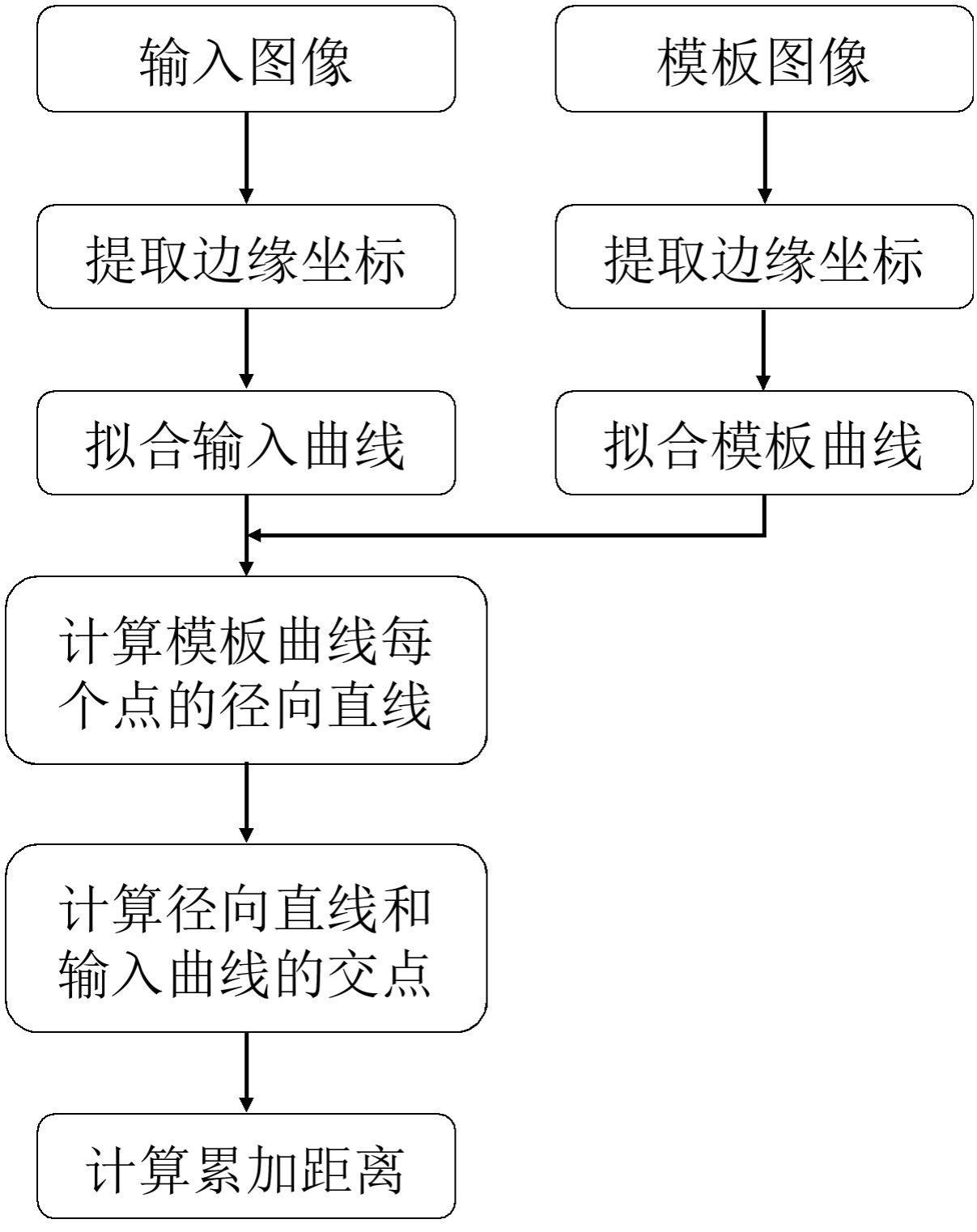
5、一种芯片引脚外观识别方法,包括以下步骤:
6、设定模板图像,建立坐标系,提取模板图像的边缘坐标;
7、输入引脚图像,对引脚图像二值化处理,得到引脚感兴趣区域图像,提取引脚感兴趣区域图像的边缘坐标;
8、将模板图像的边缘坐标和引脚感兴趣区域图像的边缘坐标分别进行归一化处理,将归一化处理后的模板图像的边缘坐标与引脚感兴趣区域图像的边缘坐标分别拟合为曲线;
9、设定当前点,计算模板图像曲线上每个点的径向方向,通过当前点和径向方向确定径向直线;
10、计算引脚感兴趣区域图像曲线与径向直线的拟合点,计算当前点和拟合点的欧式距离;
11、重复计算当前点和拟合点的欧式距离,累加当前点和拟合点的欧式距离,判断引脚感兴趣区域图像中的引脚是否为pin1引脚。
12、进一步地,人工设定锚点坐标,选择模板图像的两个端点坐标和引脚感兴趣区域图像的两个端点坐标,分别计算模板图像和引脚感兴趣区域图像上的两个端点坐标与锚点坐标的距离,选取与锚点坐标距离近的端点坐标为起始坐标,沿起始坐标方向分别提取模板图像的边缘坐标和引脚感兴趣区域图像的边缘坐标。
13、进一步地,将模板图像的边缘坐标和引脚感兴趣区域图像的边缘坐标分别进行归一化处理的计算公式为:
14、
15、其中,px表示输入坐标的横坐标值,py表示输入坐标的纵坐标值,xmax表示模板图像的边缘坐标或引脚感兴趣区域图像的边缘坐标在横向坐标上的最大值,xmin表示模板图像的边缘坐标或引脚感兴趣区域图像的边缘坐标在横向坐标上的最小值,ymax表示模板图像的边缘坐标或引脚感兴趣区域图像的边缘坐标在纵向坐标上的最大值,ymin表示模板图像的边缘坐标或引脚感兴趣区域图像的边缘坐标在纵向坐标上的最小值,p´x表示输出坐标的横坐标值,p´y表示输出坐标的纵坐标值。
16、进一步地,将归一化处理后的模板图像的边缘坐标与引脚感兴趣区域图像的边缘坐标分别拟合为曲线的拟合公式为:
17、
18、其中,b(t)表示拟合点,n表示曲线阶数,i表示当前迭代次数,bi,n表示伯恩斯坦多项式,pi表示输入点,t表示拟合权重。
19、进一步地,设定当前点为h,径向方向由ph-1和ph+1确定,则径向直线的斜率为:
20、
21、其中,kh表示径向直线的斜率,表示当前点h后一个点h+1的横坐标,表示当前点h前一个点h-1的横坐标,表示当前点h后一个点h+1的纵坐标,表示当前点h前一个点h-1的纵坐标。
22、进一步地,计算引脚感兴趣区域图像曲线与径向直线的拟合点的计算公式为:
23、
24、其中,x'表示拟合点的横坐标,y'表示拟合点的纵坐标,p1表示距离径向直线两侧最近的一个点,p1x表示距离径向直线两侧最近的一个点的横坐标,p1y表示距离径向直线两侧最近的一个点的纵坐标,p2表示距离径向直线两侧最近的另一个点,p2x表示距离径向直线两侧最近的另一个点的横坐标,p2y表示距离径向直线两侧最近的另一个点的纵坐标,w1、w2表示计算权重,d1表示p1与径向直线之间的距离,d2表示p2与径向直线之间的距离。
25、进一步地,通过引脚感兴趣区域图像曲线上距离径向直线两侧最近的两个点计算当前点和拟合点的欧式距离,计算公式为:
26、
27、其中,dist表示距离,x表示距离径向直线两侧最近的点的横坐标,y表示距离径向直线两侧最近的点的纵坐标,k、b表示径向直线参数。
28、一种芯片引脚外观识别装置,包括:
29、输入模块,设定模板图像,建立坐标系,提取模板图像的边缘坐标,输入引脚图像,对引脚图像二值化处理,得到引脚感兴趣区域图像,提取引脚感兴趣区域图像的边缘坐标;
30、识别模块,将模板图像的边缘坐标和引脚感兴趣区域图像的边缘坐标分别进行归一化处理,将归一化处理后的模板图像的边缘坐标与引脚感兴趣区域图像的边缘坐标分别拟合为曲线,设定当前点,计算模板图像曲线上每个点的径向方向,通过当前点和径向方向确定径向直线,计算引脚感兴趣区域图像曲线与径向直线的拟合点,计算当前点和拟合点的欧式距离,重复计算当前点和拟合点的欧式距离,累加当前点和拟合点的欧式距离,判断引脚感兴趣区域图像中的引脚是否为pin1引脚;
31、输出模块,输出检测结果图像。
32、一种计算机设备,包括存储器、处理器,所述存储器上存储有可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述所述的方法。
33、一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器运行时执行上述所述的方法。
34、3.有益效果
35、相比于现有技术,本发明的优点在于:
36、本发明的一种芯片引脚外观识别方法、装置、计算机设备及存储介质,通过设定模板图像,分别提取模板图像与引脚感兴趣区域图像的边缘坐标,将模板图像与引脚感兴趣区域图像的边缘坐标进行归一化处理,将归一化处理后的模板图像与引脚感兴趣区域图像的边缘坐标拟合为曲线,设定当前点,计算引脚感兴趣区域图像曲线与径向直线的拟合点,再计算当前点和拟合点的欧式距离,通过当前点和拟合点的欧式距离的大小从而可以快速、鲁棒地检测出pin1引脚,同时能够有效避免在加工造成的引脚边缘轻微变形情况下产生的误差,检测精度高。
技术特征:
1.一种芯片引脚外观识别方法,包括以下步骤:
2.根据权利要求1所述的一种芯片引脚外观识别方法,其特征在于,人工设定锚点坐标,选择模板图像的两个端点坐标和引脚感兴趣区域图像的两个端点坐标,分别计算模板图像和引脚感兴趣区域图像上的两个端点坐标与锚点坐标的距离,选取与锚点坐标距离近的端点坐标为起始坐标,沿起始坐标方向分别提取模板图像的边缘坐标和引脚感兴趣区域图像的边缘坐标。
3.根据权利要求2所述的一种芯片引脚外观识别方法,其特征在于,将模板图像的边缘坐标和引脚感兴趣区域图像的边缘坐标分别进行归一化处理的计算公式为:
4.根据权利要求3所述的一种芯片引脚外观识别方法,其特征在于,将归一化处理后的模板图像的边缘坐标与引脚感兴趣区域图像的边缘坐标分别拟合为曲线的拟合公式为:
5.根据权利要求1所述的一种芯片引脚外观识别方法,其特征在于,设定当前点为h,径向方向由ph-1和ph+1确定,则径向直线的斜率为:
6.根据权利要求1所述的一种芯片引脚外观识别方法,其特征在于,计算引脚感兴趣区域图像曲线与径向直线的拟合点的计算公式为:
7.根据权利要求6所述的一种芯片引脚外观识别方法,其特征在于,通过引脚感兴趣区域图像曲线上距离径向直线两侧最近的两个点计算当前点和拟合点的欧式距离,计算公式为:
8.一种芯片引脚外观识别装置,其特征在于,包括:
9.一种计算机设备,包括存储器、处理器,所述存储器上存储有可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现上述权利要求1-7任一项所述的方法。
10.一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,其特征在于,所述计算机程序被处理器运行时执行上述权利要求1-7中任一项所述的方法。
技术总结
本发明公开了一种芯片引脚外观识别方法、装置、计算机设备及存储介质,属于半导体检测技术领域。针对现有技术中存在的pin1引脚外观和其他引脚外观区分难度大等问题,本发明通过设定当前点,计算模板图像曲线上每个点的径向方向,通过当前点和径向方向确定径向直线,计算引脚感兴趣区域图像曲线与径向直线的拟合点,计算当前点和拟合点的欧式距离,累加当前点和拟合点的欧式距离,通过判断当前点和拟合点的欧式距离的大小从而确定引脚感兴趣区域图像中的引脚是否为pin1引脚,由此,当pin1引脚和其他引脚外观区分度很小并且在加工造成的引脚边缘轻微变形的情况下可以快速、鲁棒的检测出pin1引脚。
技术研发人员:郎斯喆,郑飞
受保护的技术使用者:合肥图迅电子科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!