一种隧道挖掘过程中岩碴片的识别方法、终端设备及介质
本技术属于机器视觉识别,尤其涉及一种隧道挖掘过程中岩碴片的识别方法、终端设备及介质。
背景技术:
1、在隧道挖掘过程中,硬岩隧道掘进机操作员需要根据挖掘到的渣料判断前方岩体的材质,从而适当的调整硬岩隧道掘进机的控制参数,以确保施工安全。
2、传统的岩碴片识别方法往往依赖操作人员的施工经验,通过操作人员的肉眼观测来判断岩碴片的种类,但是受限于肉眼视力和环境光线,这种方法的准确性较低。以此,亟需一种能够对隧道挖掘过程中岩碴片进行准确识别的方法。
技术实现思路
1、本技术提供了一种隧道挖掘过程中岩碴片的识别方法、终端设备及介质,可以解决目前隧道挖掘过程中岩碴片的识别准确性低的问题。
2、第一方面,本技术提供了一种隧道挖掘过程中岩碴片的识别方法,包括:
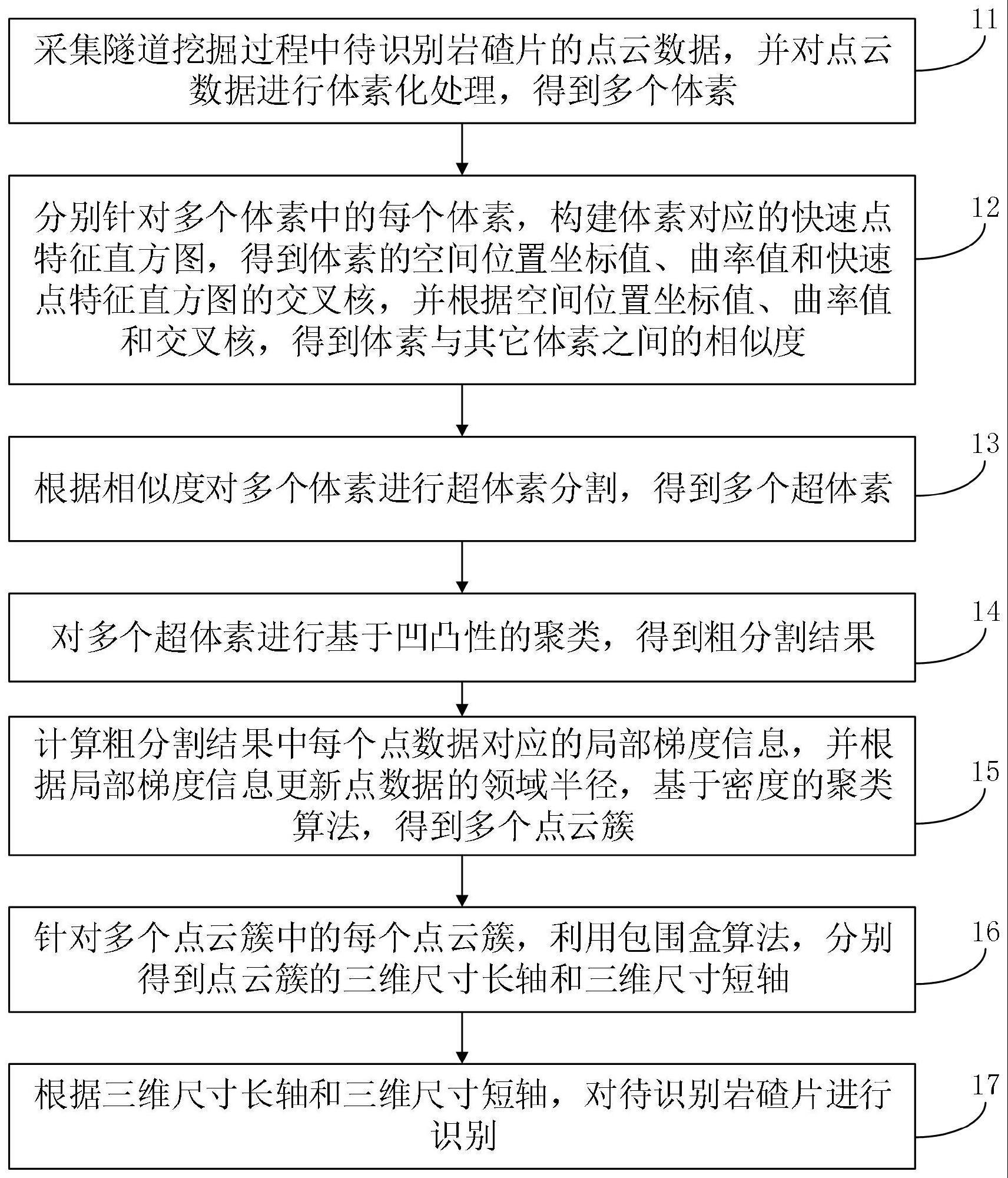
3、采集隧道挖掘过程中待识别岩碴片的点云数据,并对点云数据进行体素化处理,得到多个体素;其中,点云数据包括多个点数据,多个体素中的每个体素至少包括一个点数据;
4、分别针对多个体素中的每个体素,构建体素对应的快速点特征直方图,得到体素的空间位置坐标值、曲率值和快速点特征直方图的交叉核,并根据空间位置坐标值、曲率值和交叉核,得到体素与其它体素之间的相似度;
5、根据相似度对多个体素进行超体素分割,得到多个超体素;
6、对多个超体素进行基于凹凸性的聚类,得到粗分割结果;
7、计算粗分割结果中每个点数据对应的局部梯度信息,并根据局部梯度信息更新点数据的领域半径,基于密度的聚类算法,得到多个点云簇;
8、针对多个点云簇中的每个点云簇,利用包围盒算法,分别得到点云簇的三维尺寸长轴和三维尺寸短轴;三维尺寸长轴表示点云簇中最长的线段,三维尺寸短轴表示点云簇中最短的线段;
9、根据三维尺寸长轴和三维尺寸短轴,对待识别岩碴片进行识别。
10、可选的,根据空间位置坐标值、曲率值和交叉核,得到体素与其它体素之间的相似度,包括:
11、通过计算公式
12、
13、
14、
15、得到相似度di,j;其中,di,j表示第i个体素和第j个体素之间的相似度,i,j=1,2,...,m,i≠j,m表示体素的总数量,dsi,j表示第i个体素和第j个体素在三维空间中的欧氏距离,表示第i个体素对应的快速点特征直方图的交叉核,dci表示第i个体素的曲率值,ωdc表示曲率值的权重,ωds表示欧氏距离的权重,ωhik表示交叉核的权重,rseed表示空间分辨率,nl表示快速点特征直方图中每相邻两条数据分布之间的匹配数目,l表示快速点特征直方图中数据分布的总条数,l=1,2,...,l,(xi,yi,zi)表示第i个体素的空间位置坐标值,(xj,yj,zj)表示第j个体素的空间位置坐标值,m表示多个体素中的最大曲率值。
16、可选的,根据相似度对多个体素进行超体素分割,得到多个超体素,包括:
17、步骤一,将多个体素中的任一个体素作为当前种子体素;
18、步骤二,分别针对除当前种子体素外的每个体素,若体素与当前种子体素的相似度大于预设阈值,则将体素添加到当前种子体素所在的区域中;否则,将体素作为种子体素,得到种子体素集合;
19、步骤三,当遍历完除当前种子体素外的所有体素后,从种子体素集合中移除当前种子体素,若移除当前种子体素后的种子体素集合不是空集,则将移除当前种子体素后的种子体素集合中的任一个种子体素作为步骤二中的当前种子体素,返回执行步骤二;否则,根据步骤二的执行结果,得到多个超体素。
20、可选的,对多个超体素进行基于凹凸性的聚类,得到粗分割结果,包括:
21、通过计算公式
22、
23、得到多个超体素之间的凹凸关系其中,表示第u个超体素与第v个超体素之间的凹凸关系,表示第u个超体素的法向量,表示第v个超体素的法向量,表示第u个超体素的重心向量,表示第v个超体素的重心向量,βthresh表示第u个超体素和第v个超体素的法向量与重心连线之间夹角的差值阈值,θ表示第u个超体素和第v个超体素重心间连线和交线之间的夹角;
24、根据凹凸关系,利用区域增长算法对多个超体素进行分割,得到粗分割结果。
25、可选的,计算粗分割结果中每个点数据对应的局部梯度信息,并根据局部梯度信息更新点数据的领域半径,基于密度的聚类算法,得到多个点云簇,包括:
26、通过计算公式
27、
28、得到局部梯度信息lp(pi);其中,lp(pi)表示第i个点数据pi对应的梯度信息,tj表示第i个点数据pi八个方向的梯度值,表示第i个点数据pi邻域内的梯度值的平均值;
29、通过计算公式
30、
31、得到领域半径ri;其中,ri表示第i个点数据pi的领域半径,lpmax表示所有点数据对应的局部梯度信息中的最大值;
32、分别针对每个点数据,根据点数据的领域半径,对所有的点数据进行分割,得到多个点云簇。
33、可选的,根据三维尺寸长轴和三维尺寸短轴,对待识别岩碴片进行识别,包括:
34、通过计算公式rn=bn/an,得到识别参数rn;其中,rn表示第n个点云簇的识别参数,bn表示第n个点云簇的三维尺寸短轴,an表示第n个点云簇的三维尺寸长轴,n=1,2,...,num,num表示点云簇的总个数;
35、若rn<0.5,则将第n个点云簇对应的待识别岩碴片识别为片状岩碴片;否则,将第n个点云簇对应的待识别岩碴片识别为块状岩碴片。
36、第二方面,本技术提供了一种隧道挖掘过程中岩碴片的识别装置,包括:
37、数据采集模块,用于采集隧道挖掘过程中待识别岩碴片的点云数据,并对点云数据进行体素化处理,得到多个体素;其中,点云数据包括多个点数据,多个体素中的每个体素至少包括一个点数据;
38、相似度计算模块,用于分别针对多个体素中的每个体素,构建体素对应的快速点特征直方图,得到体素的空间位置坐标值、曲率值和快速点特征直方图的交叉核,并根据空间位置坐标值、曲率值和交叉核,得到体素与其它体素之间的相似度;
39、超体素分割模块,用于根据相似度对多个体素进行超体素分割,得到多个超体素;
40、粗分割模块,用于对多个超体素进行基于凹凸性的聚类,得到粗分割结果;
41、细分割模块,用于计算粗分割结果中每个点数据对应的局部梯度信息,并根据局部梯度信息更新点数据的领域半径,基于密度的聚类算法,得到多个点云簇;
42、三维尺寸计算模块,用于针对多个点云簇中的每个点云簇,利用包围盒算法,分别得到点云簇的三维尺寸长轴和三维尺寸短轴;三维尺寸长轴表示点云簇中最长的线段,三维尺寸短轴表示点云簇中最短的线段;
43、识别模块,用于根据三维尺寸长轴和三维尺寸短轴,对待识别岩碴片进行识别。
44、第三方面,本技术提供了一种终端设备,包括存储器、处理器以及存储在存储器中并可在处理器上运行的计算机程序,处理器执行计算机程序时实现上述的隧道挖掘过程中岩碴片的识别方法。
45、第四方面,本技术提供了一种计算机可读存储介质,计算机可读存储介质存储有计算机程序,计算机程序被处理器执行时实现上述的隧道挖掘过程中岩碴片的识别方法。
46、本技术的上述方案有如下的有益效果:
47、本技术通过构建每个体素的快速点特征直方图,得到该体素的空间位置坐标值、曲率值和快速点特征直方图的交叉核,并根据空间位置坐标值、曲率值和交叉核,得到体素与其它体素之间的相似度,舍弃了实际工况下较为无用的颜色信息,将其用曲率值替代,并使用更能描述空间特征的交叉核取代传统方法中的法向量夹角,考虑了点云的局部特征,从而提高了岩碴片识别的准确性;基于密度的聚类算法对超体素进行粗分割,然后计算粗分割结果中每个点数据对应的局部梯度信息,并根据局部梯度信息更新点数据的领域半径,基于密度的聚类算法,得到多个点云簇,能够得到更加准确的点云簇,有利于提高后续对点云簇对应的岩碴片识别的准确性。
48、本技术的其它有益效果将在随后的具体实施方式部分予以详细说明。
- 还没有人留言评论。精彩留言会获得点赞!