一种交通的全息车辆外廓尺寸测量方法、设备及存储介质与流程
本发明涉及交通运输路,特别是涉及一种交通的全息车辆外廓尺寸测量方法、设备及存储介质。
背景技术:
1、传统收费站需要大量人力,需要24小时不断有人监管进行车辆引导,收费,防止逃费等。随着高清视频技术发展,虽然可以在高速公路沿线以及收费站中设置数字化高清监控视频来实现全过程的监管,但是后续需要靠人工及时发现车辆信息异常(如外廓尺寸与车型、车牌不匹配等)、车主逃费等情况,人工排查效率以及准确率较低,不便于提升收费站通行服务水平。
技术实现思路
1、基于此,本发明的目的在于提供一种交通的全息车辆外廓尺寸测量方法、设备及存储介质,用于及时发现异常的车辆信息,以提升收费站通行服务水平。
2、第一方面,本发明提供了一种交通的全息车辆外廓尺寸测量方法,包括:
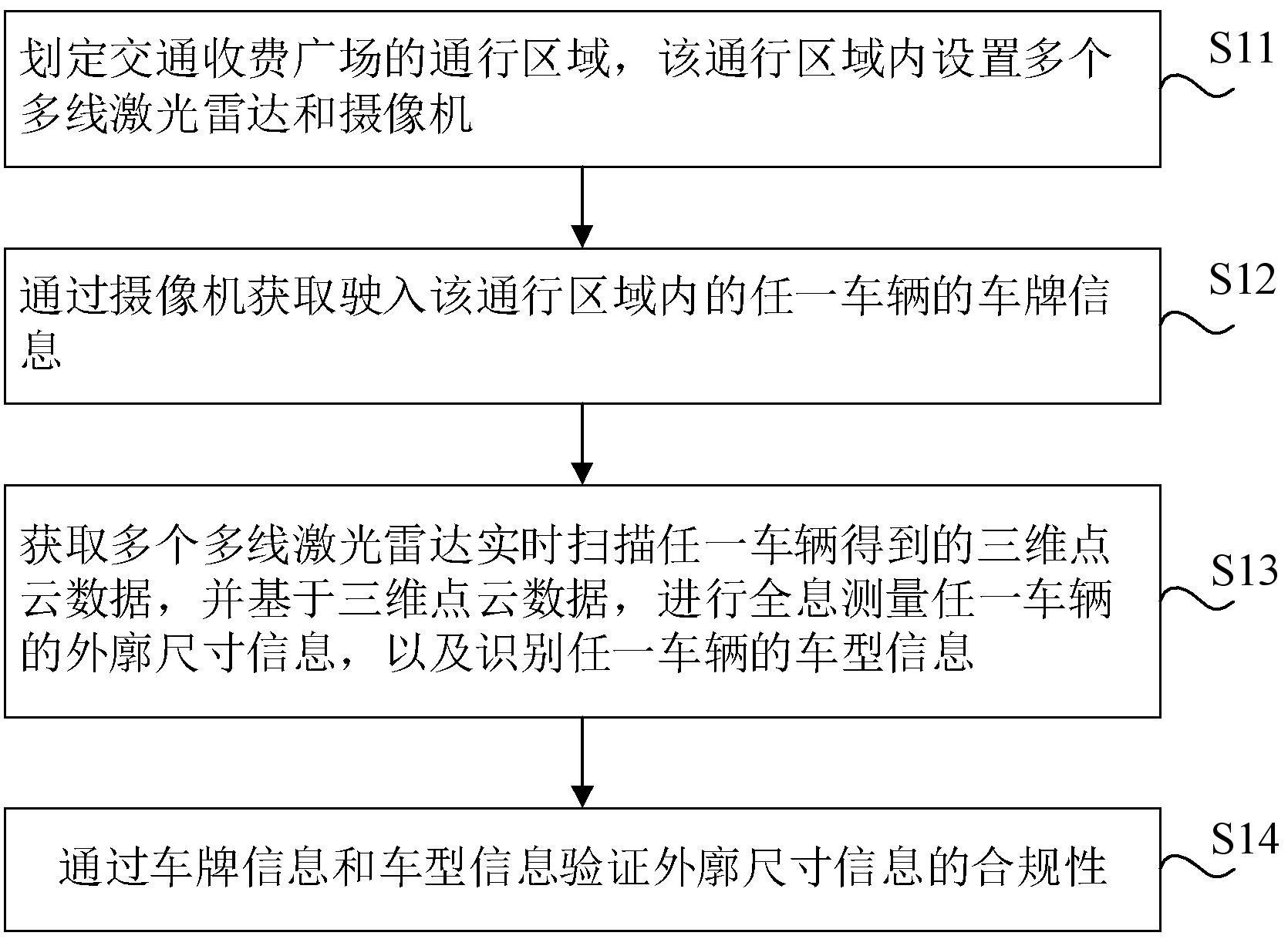
3、划定交通收费广场的通行区域,所述通行区域内设置多个多线激光雷达和摄像机;
4、通过所述摄像机获取驶入所述通行区域内的任一车辆的车牌信息;
5、获取所述多个多线激光雷达实时扫描所述任一车辆得到的三维点云数据,并基于所述三维点云数据,进行全息测量所述任一车辆的外廓尺寸信息,以及识别所述任一车辆的车型信息;
6、通过所述车牌信息和所述车型信息验证所述外廓尺寸信息的合规性。
7、在一种可能的设计中,通过所述摄像机获取驶入所述通行区域内的任一车辆的车牌信息,包括:
8、通过所述多个多线激光雷达检测到所述任一车辆行驶至所述通行区域内时,触发所述摄像机对所述任一车辆进行车牌抓拍;
9、从所述摄像机中获取所述任一车辆对应的抓拍序列参数,以及获取预存的车牌信息;
10、将所述抓拍序列参数和所述预存的车配信息进行匹配处理,确定出所述任一车辆的车牌信息,获得所述任一车辆的车牌信息。
11、在一种可能的设计中,基于所述三维点云数据,进行全息测量所述任一车辆的外廓尺寸信息,以及识别所述任一车辆的车型信息,包括:
12、对所述三维点云数据中的静态物体进行分离,保留路面上的车辆点云数据;
13、使用聚类算法对所述车辆点云数据进行目标检测,通过固定频率的两帧之间的位移对所述任一车辆标进行跟踪,同时计算得到所述任一车辆的速度信息;
14、基于所述速度信息,对所述车辆点云数据进行运动补偿还原运动畸变带来的误差,得到补偿后的车辆点云数据;
15、基于所述补偿后的车辆点云数据,识别得到所述任一车辆的尺寸信息;
16、将所述车辆点云数据输入已训练好的神经网络模型,识别得到所述任一车辆的车型信息。
17、在一种可能的设计中,对所述三维点云数据中的静态物体进行分离,保留路面上的车辆点云数据,包括:
18、录制所述三维点云数据,标定所述多个多线激光雷达的角度;
19、通过所述三维点云数据的点云特征及所述交通收费广场的现实环境判断地面,并不断调整所述多个多线激光雷达的角度,使得所述三维点云数据的点云与所述现实环境的地面重叠,再划分车辆行驶的区域为有效区域,其余区域为静态环境;
20、保留所述有效区域,获得所述车辆点云数据。
21、在一种可能的设计中,基于所述速度信息,对所述车辆点云数据进行运动补偿还原运动畸变带来的误差,得到补偿后的车辆点云数据,包括:
22、获取所述车辆点云数据的每个点云的时间戳;
23、基于所述速度信息,计算所述每个点云的位移;
24、基于所述位移移动所述每个点云后,得到所述补偿后的车辆点云数据。
25、在一种可能的设计中,基于所述补偿后的车辆点云数据,识别得到所述任一车辆的尺寸信息,包括:
26、基于所述补偿后的车辆点云数据,识别所述任一车辆的行驶方向最小值和最大值、车道方向最小值和最大值以及高度方向最小值和最大值;
27、将所述行驶方向最小值和最大值之间的差值确定为所述任一车辆的车长,将所述车道方向最小值和最大值之间的差值确定为所述任一车辆的车宽,以及将所述高度方向最小值和最大值之间的差值确定为所述任一车辆的车高,获得所述任一车辆的尺寸信息。
28、在一种可能的设计中,所述已训练好的神经网络模型为inceptionv3神经网络模型。
29、第二方面,本发明还提供了一种电子设备,包括:
30、处理单元,用于划定交通收费广场的通行区域,所述通行区域内设置多个多线激光雷达和摄像机;通过所述摄像机获取驶入所述通行区域内的任一车辆的车牌信息;获取所述多个多线激光雷达实时扫描所述任一车辆得到的三维点云数据,并基于所述三维点云数据,进行全息测量所述任一车辆的外廓尺寸信息,以及识别所述任一车辆的车型信息;
31、验证单元,用于通过所述车牌信息和所述车型信息验证所述外廓尺寸信息的合规性。
32、在一种可能的设计中,所述处理单元具体用于:
33、通过所述多个多线激光雷达检测到所述任一车辆行驶至所述通行区域内时,触发所述摄像机对所述任一车辆进行车牌抓拍;
34、从所述摄像机中获取所述任一车辆对应的抓拍序列参数,以及获取预存的车牌信息;
35、将所述抓拍序列参数和所述预存的车配信息进行匹配处理,确定出所述任一车辆的车牌信息,获得所述任一车辆的车牌信息。
36、在一种可能的设计中,所述处理单元具体用于:
37、对所述三维点云数据中的静态物体进行分离,保留路面上的车辆点云数据;
38、使用聚类算法对所述车辆点云数据进行目标检测,通过固定频率的两帧之间的位移对所述任一车辆标进行跟踪,同时计算得到所述任一车辆的速度信息;
39、基于所述速度信息,对所述车辆点云数据进行运动补偿还原运动畸变带来的误差,得到补偿后的车辆点云数据;
40、基于所述补偿后的车辆点云数据,识别得到所述任一车辆的尺寸信息;
41、将所述车辆点云数据输入已训练好的神经网络模型,识别得到所述任一车辆的车型信息。
42、在一种可能的设计中,所述处理单元具体用于:
43、录制所述三维点云数据,标定所述多个多线激光雷达的角度;
44、通过所述三维点云数据的点云特征及所述交通收费广场的现实环境判断地面,并不断调整所述多个多线激光雷达的角度,使得所述三维点云数据的点云与所述现实环境的地面重叠,再划分车辆行驶的区域为有效区域,其余区域为静态环境;
45、保留所述有效区域,获得所述车辆点云数据。
46、在一种可能的设计中,所述处理单元具体用于:
47、获取所述车辆点云数据的每个点云的时间戳;
48、基于所述速度信息,计算所述每个点云的位移;
49、基于所述位移移动所述每个点云后,得到所述补偿后的车辆点云数据。
50、在一种可能的设计中,所述处理单元具体用于:
51、基于所述补偿后的车辆点云数据,识别所述任一车辆的行驶方向最小值和最大值、车道方向最小值和最大值以及高度方向最小值和最大值;
52、将所述行驶方向最小值和最大值之间的差值确定为所述任一车辆的车长,将所述车道方向最小值和最大值之间的差值确定为所述任一车辆的车宽,以及将所述高度方向最小值和最大值之间的差值确定为所述任一车辆的车高,获得所述任一车辆的尺寸信息。
53、在一种可能的设计中,所述已训练好的神经网络模型为inceptionv3神经网络模型。
54、第三方面,本发明还提供了一种电子设备,包括:至少一个存储器和至少一个处理器;
55、所述至少一个存储器用于存储一个或多个程序;
56、当所述一个或多个程序被所述至少一个处理器执行时,实现上述第一方面任一种可能设计所涉及的方法。
57、第四方面,本发明还提供了一种计算机可读存储介质,所述计算机可读存储介质存储有至少一个程序;当所述至少一个程序被处理器执行时,实现上述第一方面任一种可能设计所涉及的方法。
58、本发明的有益效果如下:
59、相较于现有技术而言,本发明通过划定交通收费广场的通行区域,通行区域内设置多个多线激光雷达和摄像机;通过摄像机获取驶入通行区域内的任一车辆的车牌信息;获取多个多线激光雷达实时扫描任一车辆得到的三维点云数据,并基于三维点云数据,进行全息测量任一车辆的外廓尺寸信息,以及识别任一车辆的车型信息;通过车牌信息和车型信息验证外廓尺寸信息的合规性,便于及时发现异常的车辆信息,排查出车主逃费等情况,有助于提升收费站通行服务水平。
60、在本发明中,通过利用各种感知设备和数据处理技术,包括摄像机、多线激光雷达、多目标轨迹追踪等等,配合雷达点云算法,抓拍匹配等技术,从而及时获知交通收费广场的车辆异常、诱导等信息,后续再通过在通行流水、过车效率、通行日志等关键指标的基础上建立通行效率指数,即可实现打通收费、交通诱导、路网流量管控、自由流预交易、防逃费等系统,进一步可以方便全面提高收费站的通行效率和运营能力。
61、为了更好地理解和实施,下面结合附图详细说明本发明。
- 还没有人留言评论。精彩留言会获得点赞!