基于视觉AI识别算法的清污机智能控制系统的制作方法
本发明涉及一种清污机智能控制系统,尤其涉及一种基于视觉ai识别算法的清污机智能控制系统。
背景技术:
1、人工智能(ai)是使用数字计算机或由数字计算机控制的机器来模拟、延伸和扩展人类智能的理论、方法、技术和应用系统。目前国内的人工智能市场主要包括计算机视觉,语音,自然语言处理,基本算法平台和芯片。计算机视觉是人工智能市场上最重要的部分,也是人工智能的主要技术应用,所占比例已达到35%左右,产业链相对成熟。现有技术的水库在汛期的时候浮渣较多,需及时进行捞渣清理,而目前柳闸清污机只能通过现地手柄控制,不能集控远程控制,当道路中断时不能应急进行远程清污操作,影响机组的安全稳定运行。
2、现有技术的清污操作主要以人工巡视判断和栅差反馈为主,不具备智能识别和自动清污功能,而人工巡视存在一定的时间间隔,一旦栅差告警反馈时存在清污操作时间余量不够的情况,势必造成机组降负荷或停机避峰,造成流域梯级电站的发电经济损失。清污机水平行走机构长度大约60米,采用人工“一抓一放”反复循环的方式进行捞渣操作,劳动强度较大。
技术实现思路
1、本发明的目的是要提供一种基于视觉ai识别算法的清污机智能控制系统。
2、为达到上述目的,本发明是按照以下技术方案实施的:
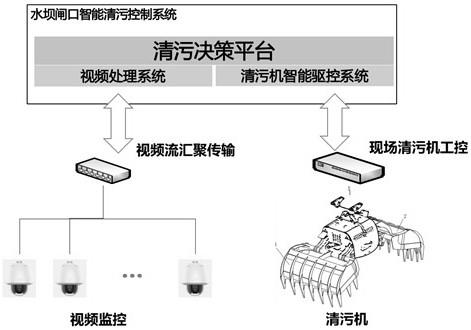
3、本发明包括智能决策平台和智能驱控系统,所述智能决策平台通过视觉ai算法进行清污巡检、形位识别、积量测算、清污决策、超过预警阈值的逻辑判断,并自动发出清污计划命令至所述智能驱控系统,所述智能驱控系统接收智能决策平台的控制命令控制清污机进行清污操作。
4、所述智能决策平台以感知智能技术为核心,使用光学非接触式感应设备自动接收大量水域场景图像处理并进行智能分析,以获得信息控制机器或流程,并充分利用互联网、5g或物联网搭建智能分析决策平台,进行水面污染的预警、处理、追踪。
5、所述智能驱控系统与孔口智能清污控制系统间通过以太网进行通讯连接,与清污现场集控系统间通过以太网进行通讯连接,与清污现场集控系统间通过zigbee进行通讯连接,与环境感测下位系统间通过zigbee进行通讯连接。
6、所述智能决策平台图像处理包括以下步骤:
7、s1:智能决策平台对接孔口终端摄像头,获取视频流,通过漂浮垃圾识别算法识别出水面上出现的漂浮垃圾并报警反馈至相关工作人员处;漂浮物垃圾检测算法采用yolov系列的深度学习神经网络,darknet_53网络通过卷积运算提取垃圾漂浮物特征,选取经过32、16和8倍采样的特征图构造预测分支进行目标检测;
8、s2:智能决策平台根据漂浮垃圾抓拍图像,利用图上量算技术,计算漂浮垃圾距孔口横向、纵向距离,智能确定清污机相对移动方向和距离;距离测量采用激光雷达,激光雷达与相机光轴平行,间距为b,激光雷达发出的激光会通过与图像校准之后,记中心为p(xl,yl),测定的距离为h,相机焦距为f;根据相机成像原理,得到的图像平面中心坐标为q(0,0),满足相似三角形的对应边成比例关系,因此,每一个像素所对应的长度为则目标空间位置可表示为
9、
10、s3:智能决策平台根据漂浮垃圾抓拍图像,利用图上量算技术,将统计目标检测区域的大小视为漂浮垃圾面积,根据预设面积阈值判断漂浮垃圾面积是否超阈值,对于超阈值情况进行报警。
11、所述智能驱控系统还设置有布设在水坝一端孔口边的立墙上的水坝孔口水位在线智能感测终端装置;布设在水坝孔口清污作业区域边框上的环境光照强度在线智能感测终端装置;布设在清污机水平行进轨道的一侧,位于水坝每孔孔口作业区域的起点和终点位置处的抓斗闸孔工位在线感测阵列终端装置;布设在清污机抓斗运动传动箱内,两个激光位移传感器沿行进轨道的相对两端共线布设的抓斗轨道位置在线智能感测终端装置;布设在清污机抓斗运动传动箱内,对清污机抓斗在垂直方向上运动的升降高度进行测量的抓斗升降高度在线智能感测终端装置;布设在清污机抓斗的吊索上,对清污机抓斗工况荷载进行监测的抓斗工况荷载在线智能感测终端装置。
12、本发明的有益效果是:
13、本发明是一种基于视觉ai识别算法的清污机智能控制系统,与现有技术相比,本发明充分运用现代化信息技术手段,通过先进的视觉ai技术和计算机处理能力,结合当前的运维管理模式以及进水口拦污栅清污机控制系统的现状,建立一套基于视觉ai的智能清污决策和控制系统。实现拦污栅进水口漂浮物的智能识别、自动清污和集控远程半自动清污操作,以提升电站设备的智能化水平,满足远程集控中心对柳坪闸首进水口拦污栅水面漂浮垃圾的监管和清理的需求,同时减轻主汛期人工作操作的工作强度。
技术特征:
1.一种基于视觉ai识别算法的清污机智能控制系统,其特征在于:包括智能决策平台和智能驱控系统,所述智能决策平台通过视觉ai算法进行清污巡检、形位识别、积量测算、清污决策、超过预警阈值的逻辑判断,并自动发出清污计划命令至所述智能驱控系统,所述智能驱控系统接收智能决策平台的控制命令控制清污机进行清污操作。
2.根据权利要求1所述的基于视觉ai识别算法的清污机智能控制系统,其特征在于:所述智能决策平台以感知智能技术为核心,使用光学非接触式感应设备自动接收大量水域场景图像处理并进行智能分析,以获得信息控制机器或流程,并充分利用互联网、5g或物联网搭建智能分析决策平台,进行水面污染的预警、处理、追踪。
3.根据权利要求1所述的基于视觉ai识别算法的清污机智能控制系统,其特征在于:所述智能驱控系统与孔口智能清污控制系统间通过以太网进行通讯连接,与清污现场集控系统间通过以太网进行通讯连接,与清污现场集控系统间通过zigbee进行通讯连接,与环境感测下位系统间通过zigbee进行通讯连接。
4.根据权利要求2所述的基于视觉ai识别算法的清污机智能控制系统,其特征在于:所述智能决策平台图像处理包括以下步骤:
5.根据权利要求3所述的基于视觉ai识别算法的清污机智能控制系统,其特征在于:所述智能驱控系统还设置有布设在水坝一端孔口边的立墙上的水坝孔口水位在线智能感测终端装置;布设在水坝孔口清污作业区域边框上的环境光照强度在线智能感测终端装置;布设在清污机水平行进轨道的一侧,位于水坝每孔孔口作业区域的起点和终点位置处的抓斗闸孔工位在线感测阵列终端装置;布设在清污机抓斗运动传动箱内,两个激光位移传感器沿行进轨道的相对两端共线布设的抓斗轨道位置在线智能感测终端装置;布设在清污机抓斗运动传动箱内,对清污机抓斗在垂直方向上运动的升降高度进行测量的抓斗升降高度在线智能感测终端装置;布设在清污机抓斗的吊索上,对清污机抓斗工况荷载进行监测的抓斗工况荷载在线智能感测终端装置。
技术总结
本发明公开了一种基于视觉AI识别算法的清污机智能控制系统,包括智能决策平台和智能驱控系统,智能决策平台通过视觉AI算法进行清污巡检、形位识别、积量测算、清污决策、超过预警阈值的逻辑判断,并自动发出清污计划命令至所述智能驱控系统,智能驱控系统接收智能决策平台的控制命令控制清污机进行清污操作。本发明实现拦污栅进水口漂浮物的智能识别、自动清污和集控远程半自动清污操作,以提升电站设备的智能化水平,满足远程集控中心对柳坪闸首进水口拦污栅水面漂浮垃圾的监管和清理的需求,同时减轻主汛期人工作操作的工作强度。
技术研发人员:薛玉林,杨炳全,孟帮杰,曾义昌,王伟,曹伦,曹俊,林涛,刘洋,熊少华
受保护的技术使用者:阿坝水电开发有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!