一种基于点云数据的城市道路三维建模方法
本发明属于三维重建,具体是涉及一种基于点云数据的城市道路三维建模方法。
背景技术:
1、随着“实景三维中国”“智慧化城市建设”等项目的深入开展,二维数据已经无法满足社会各部门的应用需求,它只能宏观的、简略的统计和分析,很难对环境细节信息和数据进行查询、统计、分析。全要素实景模型是高清、高精的结构化、实体化的成果,具有同一空间的地理要素以及相关联的全空间、全要素、实景三维模型,可以有效地刻画地物的几何、拓扑和语义等特征,实现从二维数据到三维空间的转变,为城市管理与规划提供了有效手段。城市道路建模是构建城市三维场景的重要内容之一,传统建模方式是将地形图和地形测量数据文件作为数据源,再结合外业人员获取的道路细节及纹理信息进行建模,但这类数据只能表达离散的点、线特征,不能完整而精确地反映道路实际情况。
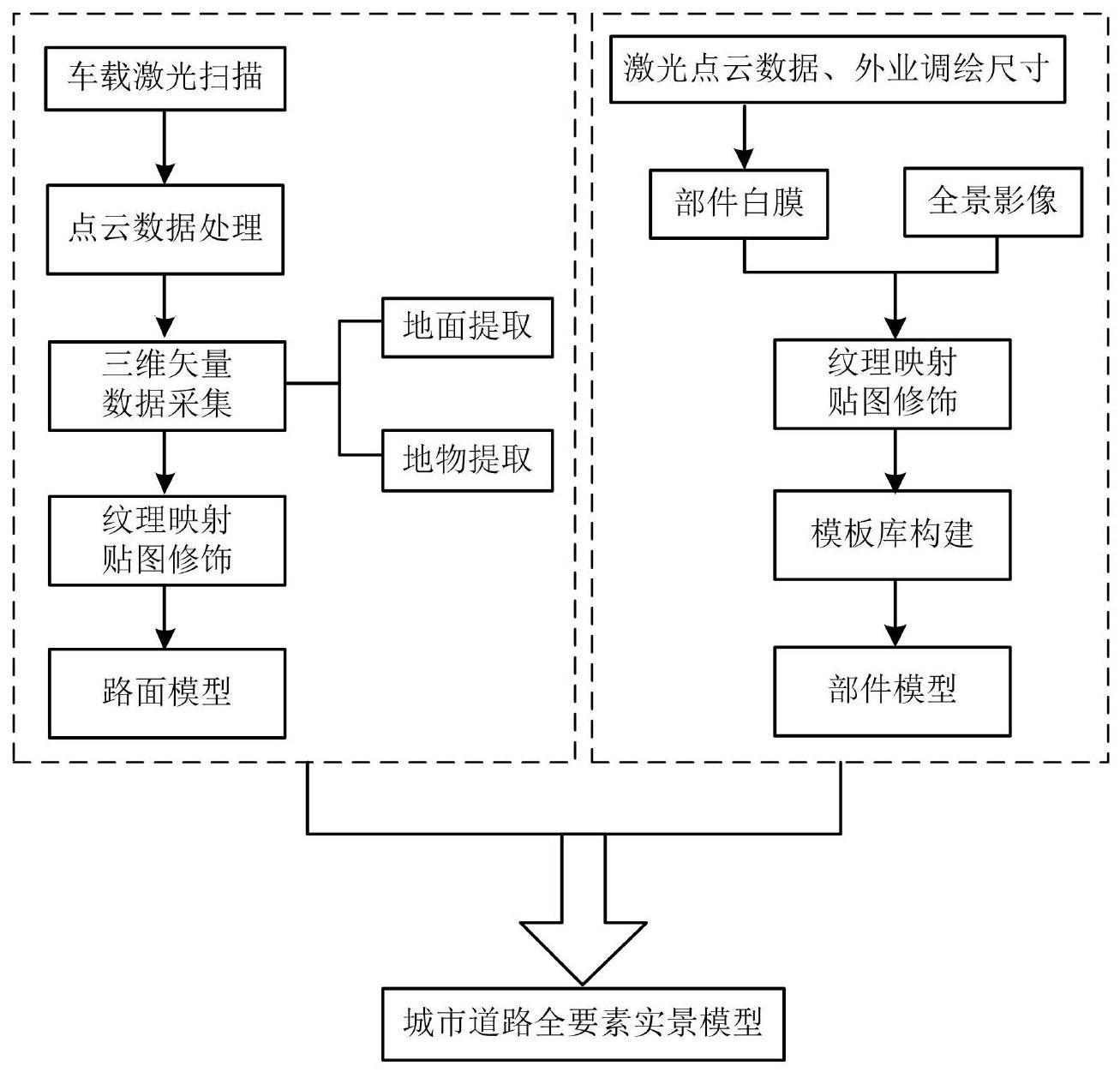
2、车载激光扫描技术是一种新兴测绘产物,随着车体移动可以获取建筑物、道路、植被等表面三维空间及纹理信息,具有精度高、信息丰富、高效快捷等不可替代的优势,已经成为道路全息测绘的重要手段。本文以车载点云数据为数据源进行城市道路实景建模,利用eps三维测图软件采集三维矢量数据,用3ds max建模软件对提取的三维矢量数据进行场景构建;然后以局部点云数据为参考进行部件建模,基于真实纹理以及外业调绘的尺寸进行部件1:1还原;最后利用3ds max软件将城市道路以及道路两侧城市部件模型合并完成道路全要素三维实景模型。
3、综上所述,针对传统道路建模精度低、耗时长等问题,本发明基于点云数据对道路及部件进行建模,得到了精度高、真实、美观的三维模型数据,对我国智慧城市建设有重要意义。
技术实现思路
1、本发明针对传统道路建模精度低、耗时长等问题,提出了一种基于点云数据的城市道路三维建模方法,保证了三维场景完整性和真实性,减少了作业时间和成本,实现了各类模型之间无缝结合,解决了模型精度低、信息不完整的问题。
2、为实现上述目的,本发明包括以下步骤:
3、s1:利用as900hl多平台激光雷达测量系统为基础的车载激光扫描仪进行点云数据采集,对外业采集的点云数据进行解算和纠正,得到满足模型精度指标的点云数据,将采集的点云数据作为数据源进行城市道路三维建模;
4、s2:以s1得到的点云数据为基础,利用eps三维测图软件进行道路三维矢量数据采集,得到道路全要素三维矢量数据;
5、s3:将s2的得到的三维矢量数据按照道路及部件进行分类,根据点云数据和全景照片利用3ds max软件构建部件模板库;
6、s4:以三维矢量数据为基础,利用三维特征线构建道路模型;
7、s5:基于3ds max软件,按照三维矢量数据中部件的位置、方向,将模板库中的部件放入道路三维场景中,进行矢量—模型属性关联,并对模型进行质量检查和修改,完成城市道路及部件三维建模。
8、2.根据权利要求1所述的一种基于点云数据的城市道路三维建模方法,其特征在于,所述的步骤s1包括以下步骤:
9、(1)数据采集前,根据试验区域内道路地形,做好扫描路线规划、停车区规划等准备工作。依据任务区域的划分结果和踏勘报告,合理布设基站点位并进行静态观测。用于精度验证和纠正的控制点的布设和观测可以在数据采集前进行布设,也可以在初步解算出点云数据之后依据点云数据进行布设采集。
10、(2)准备工作完成之后,根据划分的任务单元,逐个单元进行路线规划,车载数据采集时,依据规划的路线进行导航采集。实际采集时,要根据实地的路况、天气等因素进行路线调整。
11、(3)对外业采集的点云数据进行解算和纠正;在copre后处理软件中创建一个新项目,将原始数据添加到项目中,并通过使用原始点云数据和轨迹数据进行求解得到三维点云数据,将点云数据与全景照片配准来获得彩色点云数据。
12、3.根据权利要求1所述的一种基于点云数据的城市道路三维建模方法,其特征在于,所述的步骤s2包括以下步骤:
13、(1)提取线状要素主要包括道路标线和道路边线两大类。道路标线提取时,首先根据标线类型选择对应的要素编码,在点云数据中提取道路标线的几何中心位置,在弧度较大的地方应添加节点,以保证三维矢量数据的平面位置和高程位置的准确性;
14、(2)提取道路边线需要在自由视图下采集,平直区域画直线,弧度较大的地方添加节点,在高程变化较大的地方缩短采样点间隔,提取过程中要调整视角根据点云数据关注高程是否正确。提取完一段路后需要在俯视图和透视图的状态下检查线状要素在平面位置和高程位置上与点云的贴合程度,有偏差的地方挪动或加密采样点,使提取的线状要素最大程度与实地吻合;
15、(3)提取点状要素包括杆类、箱类、牌类等部件。例如,杆状物采集时应参照全景影像,平面位置取杆状物中心,高程取杆旁地面高程,用相应的路灯、探头、红绿灯、电杆等符号表示,填写杆状物的编号和顶部绝对高程等属性,并且在采集过程中要调整不同视角确保最后采集的点状要素位置高程信息准确。其余城市部件提取时均需要使用相应的要素编码,提取道路部件与地面连接处的几何中心;
16、(4)提取面状要素时,面状要素的三维特征线在平面和高程上应闭合,并以面域填充。
17、4.根据权利要求1所述的一种基于点云数据的城市道路三维建模方法,其特征在于,将城市常见部件分为杆类、箱类、牌类、树类等,部件模板库构建包括白膜制作和纹理贴图,结合点云数据和外业调绘地物的实际尺寸,利用3ds max软件进行白膜制作,建模方法主要采用多边形建模、样条线建模以及复合对象建模,实现模型与实物1:1还原;然后结合全景影像选取色彩鲜艳、角度良好、清晰无遮挡的照片,进行裁剪处理,制作成纹理贴图,在3ds max软件选择对应的面,通过uvw贴图进行模型纹理映射。
18、5.根据权利要求1所述的一种基于点云数据的城市道路三维建模方法,其特征在于,城市路面模型的构建范围是从道路一侧的人行道最外侧边缘到道路另一侧人行道最外侧边缘,包括两侧人行道。利用三维矢量数据提取的道路边线、地类界、外侧范围线等线状要素构建主路面、人行道以及绿化花坛等要素模型。
19、6.根据权利要求1所述的一种基于点云数据的城市道路的三维建模方法,其特征在于,根据各部件模型的种类、实际位置和方向将模板库中的模型通过自动和半自动结合的方式植入三维场景中,将城市部件要素模型从模型库中进行调用,根据三维矢量数据中各部件的位置、朝向信息,在3ds max中通过移动、旋转等操作将部件模板库中的模型放入三维场景中的准确位置;对道路三维模型进行质量检查包括命名检查、精度检查、几何数据检查、纹理数据检查、属性数据检查。
20、由上,本发明针对利用传统道路三维建模精度低的问题,提出了一种基于点云数据的城市道路三维建模方法,提高了模型的精度,有利于实际应用,为我国地理信息系统提供了一定的技术支撑。
技术特征:
1.一种基于点云数据的城市道路三维建模方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的一种基于点云数据的城市道路三维建模方法,其特征在于,所述的步骤s1包括以下步骤:
3.根据权利要求1所述的一种基于点云数据的城市道路三维建模方法,其特征在于,所述的步骤s2包括以下步骤:
4.根据权利要求1所述的一种基于点云数据的城市道路三维建模方法,其特征在于,将城市常见部件分为杆类、箱类、牌类、树类等,部件模板库构建包括白膜制作和纹理贴图,结合点云数据和外业调绘地物的实际尺寸,利用3ds max软件进行白膜制作,建模方法主要采用多边形建模、样条线建模以及复合对象建模,实现模型与实物1:1还原;然后结合全景影像选取色彩鲜艳、角度良好、清晰无遮挡的照片,进行裁剪处理,制作成纹理贴图,在3dsmax软件选择对应的面,通过uvw贴图进行模型纹理映射。
5.根据权利要求1所述的一种基于点云数据的城市道路三维建模方法,其特征在于,城市路面模型的构建范围是从道路一侧的人行道最外侧边缘到道路另一侧人行道最外侧边缘,包括两侧人行道,利用三维矢量数据提取的道路边线、地类界、外侧范围线等线状要素构建主路面、人行道以及绿化花坛等要素模型。
6.根据权利要求1所述的一种基于点云数据的城市道路三维建模方法,其特征在于,根据各部件模型的种类、实际位置和方向将模板库中的模型通过自动和半自动结合的方式植入三维场景中,将城市部件要素模型从模型库中进行调用,根据三维矢量数据中各部件的位置、朝向信息,在3ds max中通过移动、旋转等操作将部件模板库中的模型放入三维场景中的准确位置;对道路三维模型进行质量检查包括命名检查、精度检查、几何数据检查、纹理数据检查、属性数据检查。
技术总结
本发明提出了一种基于点云数据的城市道路三维建模方法,设计并完成城市道路及部件的三维模型构建。首先利用车载激光扫描仪采集道路及道路两侧部件,对试点区域内的全部主干道实现了全覆盖,完成车载点云数据采集;然后,利用EPS测图平台采集道路及各部件的三维矢量数据,将采集的三维矢量数据作为城市三维建模的数据基础;最后利用3DSMax软件构建部件模板库、城市路面模型,并将三维模型和矢量信息进行关联融合,形成信息化单体模型。本发明方法不仅可以保证场景完整性和真实性,还减少了作业时间和成本,实现了各类模型之间无缝结合,完成的模型精度较高并可以全方面的表达道路及部件信息,对三维城市精细化管理有重要意义,可为我国地理信息系统作为一定的技术支撑。
技术研发人员:徐辛超,丁雪,郑涛,汪远
受保护的技术使用者:辽宁工程技术大学
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!