摄像头跟踪方法、装置及存储介质与流程
本技术涉及目标跟踪领域,尤其涉及一种摄像头跟踪方法、装置及存储介质。
背景技术:
1、随着计算机技术的发展,多目标跟踪已经成为计算机视觉领域的趋势。
2、现有技术中针对多摄像机多目标的跟踪方法主要有两种。一种是基于摄像机视图,来进行多摄像机多目标的跟踪。另一种是基于时空约束,通过目标在多个角度的视图中的图像坐标计算其三维空间位置,再进行目标轨迹的预聚类和目标轨迹匹配等,来进行多摄像机多目标的跟踪。
3、然而,无论是基于摄像机视图进行多摄像机多目标的跟踪,还是基于时空约束进行多摄像机多目标的跟踪,都会产生因为目标间的遮挡和目标模糊的外观导致目标的错误检测和漏检,或者在多个摄像机视图中不存在重叠区域时,无法解决目标重识别和轨迹匹配的问题。如此,现有的多摄像机多目标的跟踪方法在进行多摄像头多目标跟踪时的准确率较低。
技术实现思路
1、本技术提供一种摄像头跟踪方法、装置及存储介质,能够解决多摄像头多目标跟踪时的准确率较低的问题。
2、为达到上述目的,本技术采用如下技术方案:
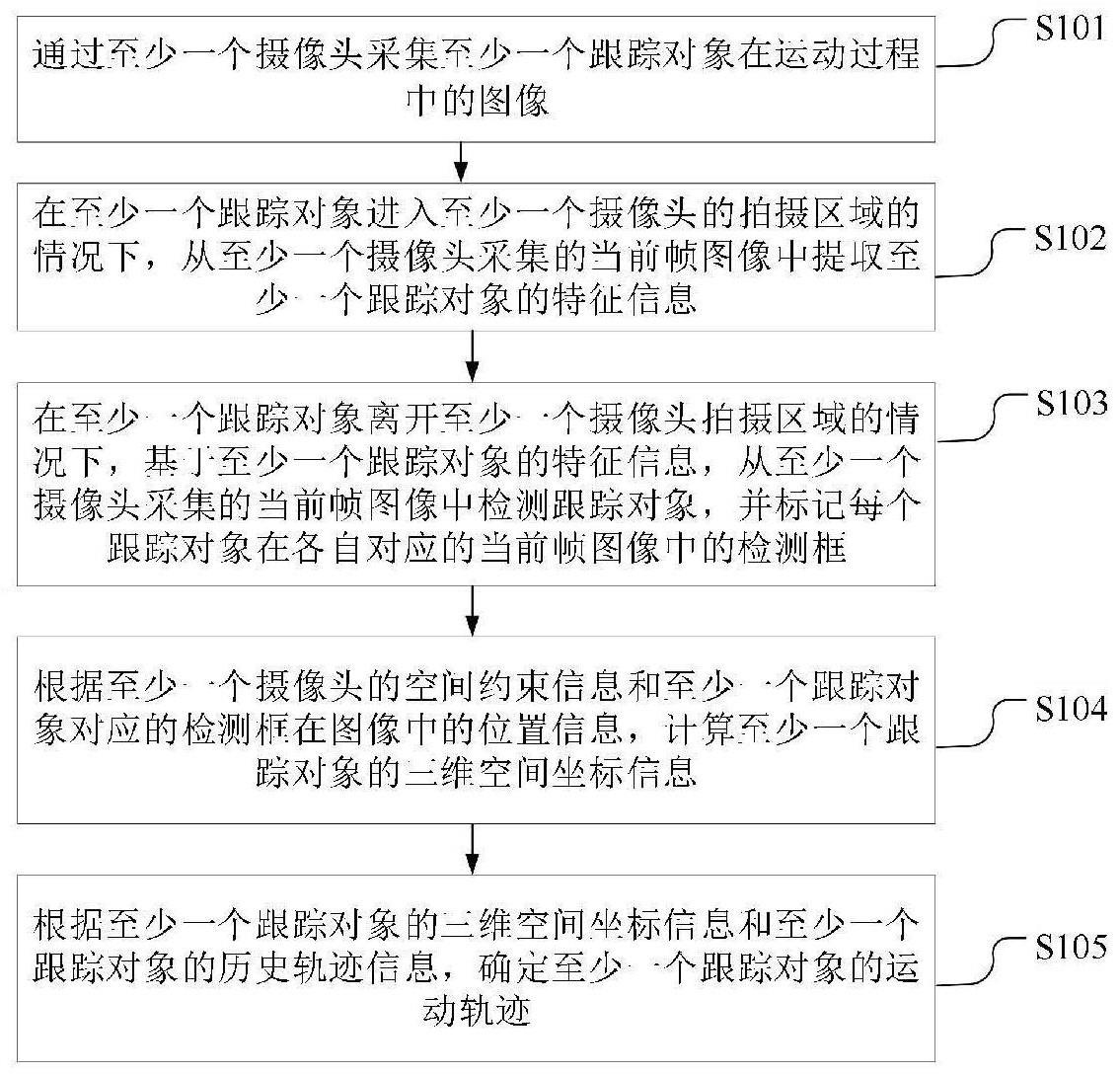
3、第一方面,本技术提供一种摄像头跟踪方法,该方法包括:通过至少一个摄像头采集至少一个跟踪对象在运动过程中的图像,每个摄像头对应至少一个跟踪对象中的一个或多个跟踪对象;在至少一个跟踪对象进入至少一个摄像头的拍摄区域的情况下,从至少一个摄像头采集的当前帧图像中提取至少一个跟踪对象的特征信息;在至少一个跟踪对象离开至少一个摄像头拍摄区域的情况下,基于至少一个跟踪对象的特征信息,从至少一个摄像头采集的当前帧图像中检测跟踪对象,并标记每个跟踪对象在各自对应的当前帧图像中的检测框;根据至少一个摄像头的空间约束信息和至少一个跟踪对象对应的检测框在图像中的位置信息,计算至少一个跟踪对象的三维空间坐标信息;根据至少一个跟踪对象的三维空间坐标信息和至少一个跟踪对象的历史轨迹信息,确定至少一个跟踪对象的运动轨迹。
4、基于上述技术方案,本技术实施例提供的摄像头跟踪方法,可以通过至少一个摄像头采集至少一个跟踪对象在运动过程中的图像,然后根据该至少一个跟踪对象的特征信息,从至少一个摄像头采集的当前帧图像中检测出跟踪对象,并以检测框的形式标记出来。再根据摄像头的空间约束信息和检测框在图像中的位置信息,计算出跟踪对象的三维空间坐标信息。最后通过跟踪对象的三维空间坐标信息和历史轨迹信息,确定出跟踪对象的运动轨迹。如此,可以通过检测包含跟踪对象的图像,将跟踪对象在图像中的位置转换到三维空间坐标进行跟踪,避免了跟踪对象跟踪错误或跟踪对象丢失的情况,提高了多摄像头多跟踪对象的情况下跟踪的准确性。
5、在第一方面的第一种可能的实现方式中,在上述通过至少一个摄像头采集至少一个跟踪对象在运动过程中的图像之前,方法还包括:配置至少一个摄像头的畸变参数和空间约束信息,畸变参数用于矫正至少一个摄像头采集的图像。
6、在第一方面的第二种可能的实现方式中,上述空间约束信息包括以下至少之一:摄像头拍摄主平面的单应性变换矩阵;摄像头拍摄区域的目标出入边界;摄像头间的空间拓扑关系。
7、在第一方面的第三种可能的实现方式中,在上述计算至少一个跟踪对象的三维空间坐标信息之后,方法还包括:根据至少一个跟踪对象的三维空间坐标信息和至少一个跟踪对象的历史轨迹信息,预测至少一个跟踪对象的下一个位置;对预测的跟踪对象的下一个位置与检测框进行匹配,对于与预测的跟踪对象的下一个位置不匹配的第一检测框,判断第一检测框中的跟踪对象是否处于目标出入边界对应的区域;在跟踪对象不处于目标出入边界对应的区域中,且跟踪对象的上一个位置被遮挡的情况下,采用被遮挡的目标位置,重新预测跟踪对象的下一个位置;或者,在跟踪对象处于目标出入边界对应的区域中的情况下,确定跟踪对象离开拍摄区域。
8、在第一方面的第四种可能的实现方式中,在上述从至少一个摄像头采集的当前帧图像中检测跟踪对象,并标记每个跟踪对象在各自对应的当前帧图像中的检测框之后,方法还包括:在目标检测框中的跟踪对象的置信度大于或等于第一阈值的情况下,将目标检测框确定为高分检测框;或者在目标检测框中的跟踪对象的置信度小于第一阈值的情况下,将目标检测框确定为低分检测框;在预测跟踪对象的下一个位置之后,对于与预测的跟踪对象的下一个位置不匹配的高分检测框,基于高分检测框对应的跟踪对象的特征信息和空间约束信息,进行跟踪对象的重识别,确定出跟踪对象的运动轨迹。
9、第二方面,本技术提供一种摄像头跟踪装置,该装置包括:图像采集模块、特征提取模块、检测模块、空间位置计算模块和轨迹匹配模块。图像采集模块,用于通过至少一个摄像头采集至少一个跟踪对象在运动过程中的图像,每个摄像头对应岁数至少一个跟踪对象中的一个或多个跟踪对象。特征提取模块,用于在至少一个跟踪对象进入至少一个摄像头的拍摄区域的情况下,从图像采集模块通过至少一个摄像头采集的当前帧图像中提取至少一个跟踪对象的特征信息。检测模块,用于在至少一个跟踪对象离开至少一个摄像头拍摄区域的情况下,基于特征提取模块提取的至少一个跟踪对象的特征信息,从至少一个摄像头采集的当前帧图像中检测跟踪对象,并标记每个跟踪对象在各自对应的当前帧图像中的检测框。空间位置计算模块,用于根据至少一个摄像头的空间约束信息和检测模块检测到的至少一个跟踪对象的检测框在图像中的位置信息,计算至少一个跟踪对象的三位空间坐标的信息。轨迹匹配模块,用于根据至少一个跟踪对象的三维空间坐标信息和至少一个跟踪对象的历史轨迹信息,确定至少一个跟踪对象的运动轨迹。
10、在第二方面的第一种可能的实现方式中,装置还包括:配置模块;配置模块,用于在图像采集模块通过至少一个摄像头采集至少一个跟踪对象在运动过程中的图像之前,配置至少一个摄像头的畸变参数和空间约束信息,畸变参数用于图像采集模块矫正至少一个摄像头采集的图像。
11、在第二方面的第二种可能的实现方式中,上述空间约束信息包括以下至少之一:摄像头拍摄主平面的单应性变换矩阵;摄像头拍摄区域的目标出入边界;摄像头间的空间拓扑关系。
12、在第二方面的第三种可能的实现方式中,装置还包括:预测模块和确定模块;预测模块,用于空间位置计算模块计算至少一个跟踪对象的三维空间坐标信息之后,根据至少一个跟踪对象的三维空间坐标信息和至少一个跟踪对象的历史轨迹信息,预测至少一个跟踪对象的下一个位置。上述确定模块,还用于对预测模块预测的跟踪对象的下一个位置与检测框进行匹配,对于与预测的跟踪对象的下一个位置不匹配的第一检测框,判断第一检测框中的跟踪对象是否处于目标出入边界对应的区域。上述确定模块,还用于在跟踪对象不处于目标出入边界对应的区域中,且跟踪对象的上一个位置被遮挡的情况下,采用被遮挡的目标位置,重新预测跟踪对象的下一个位置;或者,在跟踪对象处于目标出入边界对应的区域中的情况下,确定跟踪对象离开拍摄区域。
13、在第二方面的第四种可能的实现方式中,装置还包括:确定模块;确定模块,用于在检测模块从至少一个摄像头采集的当前帧图像中检测出跟踪对象,并标记每个跟踪对象在各自对应的当前帧图像中的检测框之后,在目标检测框中的跟踪对象的置信度大于或等于第一阈值的情况下,将目标检测框确定为高分检测框;或者在目标检测框中的跟踪对象的置信度小于第一阈值的情况下,将目标检测框确定为低分检测框;在预测跟踪对象的下一个位置之后,对于与预测的跟踪对象的下一个位置不匹配的高分检测框,基于高分检测框对应的跟踪对象的特征信息和空间约束信息,进行跟踪对象的重识别,确定出跟踪对象的运动轨迹。
14、第三方面,本技术提供了一种摄像头跟踪装置,该装置包括:处理器和通信接口;通信接口和处理器耦合,处理器用于运行计算机程序或指令,以实现如第一方面和第一方面的任一种可能的实现方式中所描述的摄像头跟踪方法。
15、第四方面,本技术提供了一种计算机可读存储介质,计算机可读存储介质中存储有指令,当指令在终端上运行时,使得终端执行如第一方面和第一方面的任一种可能的实现方式中描述的摄像头跟踪方法。
16、第五方面,本技术实施例提供一种包含指令的计算机程序产品,当计算机程序产品在摄像头跟踪装置上运行时,使得摄像头跟踪装置执行如第一方面和第一方面的任一种可能的实现方式中所描述的摄像头跟踪方法。
17、第六方面,本技术实施例提供一种芯片,芯片包括处理器和通信接口,通信接口和处理器耦合,处理器用于运行计算机程序或指令,以实现如第一方面和第一方面的任一种可能的实现方式中所描述的摄像头跟踪方法。
18、具体的,本技术实施例中提供的芯片还包括存储器,用于存储计算机程序或指令。
- 还没有人留言评论。精彩留言会获得点赞!