基于语义式图像处理的河道漂浮物识别系统的制作方法
本发明涉及河道障碍物分析,尤其涉及基于语义式图像处理的河道漂浮物识别系统。
背景技术:
1、河道是行洪的通道,河道的防洪安全、行洪畅通,对抗御洪水灾害具有重要作用。河道是水资源的载体,水资源是关系人类生存的一种最基本自然资源,水资源的开发、利用、管理、保护离不开河道这一重要载体。河道是生态环境的组成部分,在整个地球生态系统中,河流是连接陆地生态系统与海洋生态系统最重要的桥梁之一,是水生物、陆生物相互依赖的纽带,在提供生物多样性等方面发挥重要作用。
2、目前河道运行管理的漂浮物状况主要依赖人工现场巡查,近年来河道越来越广泛地建设图像和视频监控系统,但是目前图像及视频监控基本采用人工判读,具有一定的局限性,很显然,当前对于河道漂浮物检测还存在以下不足:
3、目前基于阈值的图像分割方法主要是利用图像的灰度特征来求解一组灰度阈值,这类方法只考虑单个像素的特征,没有联系像素与像素之间的空间关系,所以容易受到噪声干扰,稳定性不好,适用场景局限性高;
4、2、由于水面具有光滑特性,当摄像头对水面进行成像时,很容易受到如风等天气原因的干扰,使图像中水面出现不同的视觉感受或反光等现象,在一定程度上降低了监测精度,从而降低监测数据的精准性,无法为后续河道漂浮物治理提供科学决策;
5、3、藻类漂浮物在进行巡查的过程中需要人员肉眼去估计河道中漂浮物的面积大小,再决定是否进行清理,这往往造成大量人力物力的浪费,人力成本高,巡查效率低。
技术实现思路
1、本发明针对现有技术的不足,提供了基于语义式图像处理的河道漂浮物识别系统。
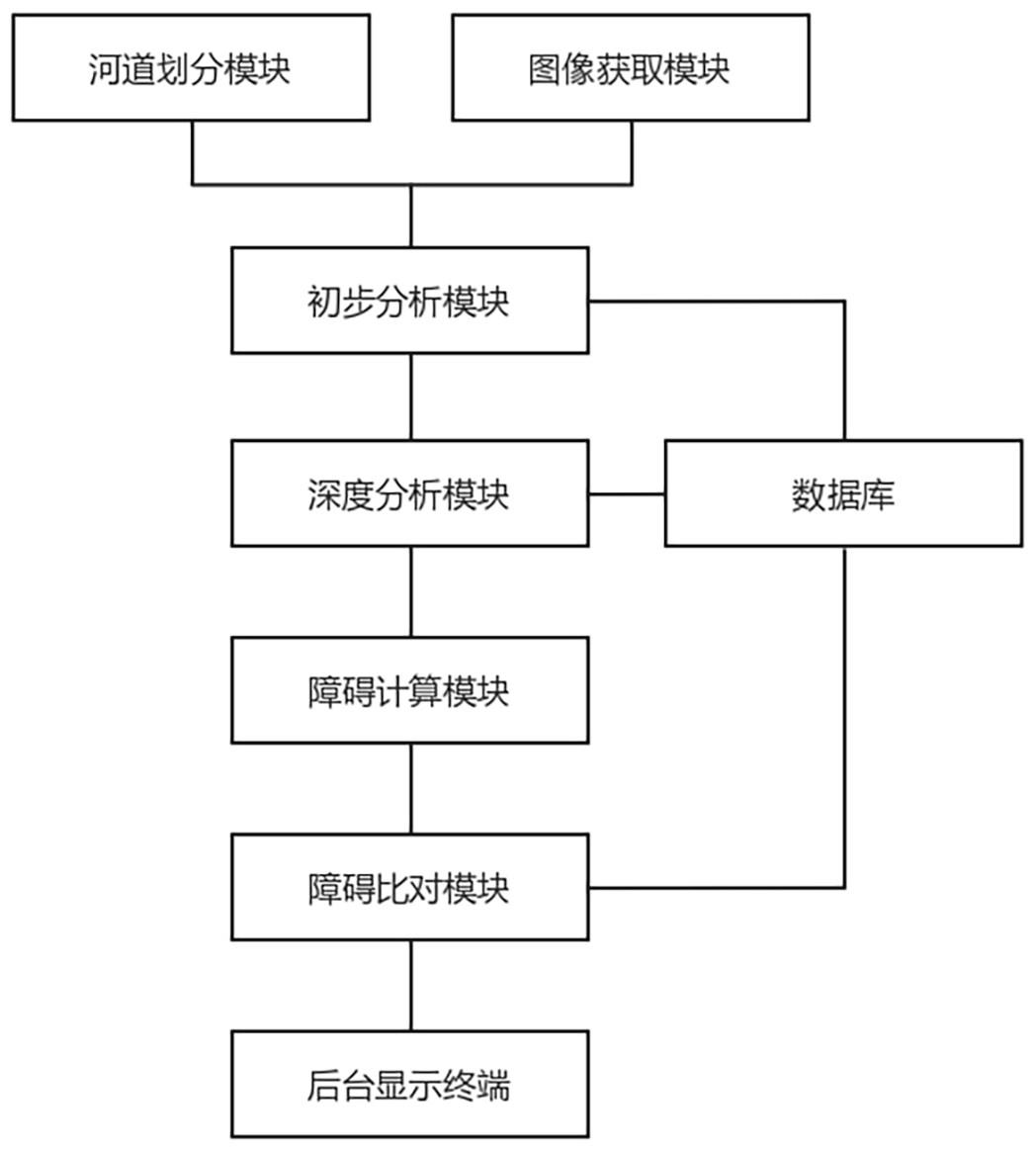
2、本发明通过以下技术手段实现解决上述技术问题的:基于语义式图像处理的河道漂浮物识别系统,该系统包括河道划分模块、图像获取模块、初步分析模块、深度分析模块、障碍计算模块、障碍比对模块、后台显示终端和数据库。
3、所述河道划分模块,用于获取目标河道对应的位置,将目标河道按照平面网格式的划分方式划分为各监测子河道,并获取各监测子河道对应的位置;
4、所述图像获取模块,用于根据布设的无人航拍机进而对各监测子河道进行图像采集,进而获取得到各监测子河道对应的图像信息;
5、所述初步分析模块,用于对各监测子河道对应的图像信息进行初步信息分析,通过初步信息分析得出各监测子河道对应的障碍物信息;
6、所述深度分析模块,用于根据各监测子河道对应的障碍物信息,进而分析得出各监测子河道中对应各障碍物的类别;
7、所述障碍计算模块,用于根据各监测子河道对应的障碍物信息,分析得出各监测子河道中对应各障碍物的实际面积;
8、所述障碍比对模块,用于根据各监测子河道中对应各障碍物的实际面积,进而筛选得出各预警子河道,并同时获取各预警子河道对应的信息;
9、所述后台显示终端,用于接收各预警子河道对应的信息,并对各预警子河道进行预警处理,同时还将各预警子河道对应的信息反馈至目标河道对应的管理人员进行对应处理;
10、所述数据库,用于存储河道许可障碍物面积和参考清晰图像的最佳明暗度,还用于存储各河道漂浮物名称对应的纹理特征值区间。
11、作为优选方案,所述各监测子河道对应的图像信息包括拍摄图像以及拍摄图像对应的拍摄时间、拍摄高度和拍摄角度。
12、作为优选方案,所述各监测子河道对应的障碍物信息包括障碍物数目和各障碍物图像。
13、作为优选方案,所述分析得出各监测子河道对应的障碍物信息,具体分析过程如下:
14、q1、根据各监测子河道对应的图像信息,从中提取出各监测子河道中拍摄图像对应的拍摄时间,并根据各监测子河道对应所处位置的气象局,获取得到各监测子河道对应拍摄图像的拍摄时间的光线明暗度,并从数据库中提取出参考清晰图像的最佳明暗度,将其记为;
15、q2、从各监测子河道对应的图像信息提取出各监测子河道对应拍摄图像,进而从中提取出各监测子河道对应拍摄图像的各像素点的三基色值,利用计算公式,计算得出各监测子河道对应拍摄图像中各像素点的光线调整三基色值,其中,h表示为各监测子河道对应的编号,h=1,2,......w,s表示为各像素点对应的编号,s=1,2,......q,d表示为预定义的亮度调整系数,表示为第h个监测子河道对应拍摄图像的第s像素点的三基色值,表示为第h个监测子河道对应拍摄图像的拍摄时间的光线明暗度。
16、作为优选方案,所述分析得出各监测子河道对应的障碍物信息,具体分析过程还包括以下步骤:
17、w1、根据各监测子河道对应拍摄图像中各像素点的光线调整三基色值,进而构建得到各监测子河道对应拍摄光线调整图像,并将各监测子河道对应拍摄光线调整图像进行灰度处理,得出各监测子河道对应拍摄光线调整图像的灰度图像,将其标记为各监测子河道对应调整灰度图像;
18、w2、将各监测子河道对应调整灰度图像进行滤波处理,从中提取出各监测子河道对应调整灰度图像中各像素点对应的像素信息,其中,像素信息包括rgb值;
19、w3、将各监测子河道对应调整灰度图像中各像素点对应的rgb值进行统计,从中筛选出rgb值数目排列第一的像素点作为各监测子河道对应调整灰度图像的非障碍物像素点,反之则将记为障碍物像素点,由此获得各监测子河道对应调整灰度图像中各障碍物像素点;
20、w4、根据各监测子河道对应调整灰度图像,由此得出各障碍物像素点在各监测子河道对应调整灰度图像对应的rgb值,将rgb值相同的各监测子河道对应调整灰度图像中的各障碍物像素点进行连接处理,由此得到各监测子河道对应的各障碍物图像,并依据各监测子河道对应的各障碍物图像得到各监测子河道对应的障碍物数目。
21、作为优选方案,所述分析得出各监测子河道中对应各障碍物的类别,具体分析过程如下:
22、e1、获取各监测子河道对应的各障碍物图像的像素,并将各监测子河道对应的各障碍物图像按照等面积的划分方式划分为各监测子河道对应的各障碍物子图像,并获取各监测子河道对应各障碍物图像中各障碍物子图像的各像素点,进而从中提取出lbp特征,并依据lbp特征从中提取出各监测子河道对应各障碍物图像中各障碍物子图像中的中心像素点的灰度值和各非中心像素点的灰度值;
23、e2、依据各监测子河道对应各障碍物子图像的各像素点,提取出各监测子河道对应各障碍物子图像的像素点总数目,进而依据分析公式,计算得出各监测子河道对应各障碍物图像中各障碍物子图像中心像素点的纹理特征值,u表示为各非中心像素点对应的编号,,m表示为各障碍物子图像对应的编号,,p表示为障碍物图像对应的编号,p=1,2,......k,r表示为像素点总数目,表示为第h监测子河道对应第p障碍物图像中第m障碍物子图像中的中心像素点的灰度值,表示为第h监测子河道对应第p障碍物图像中第m障碍物子图像中的第u非中心像素点的灰度值;
24、e3、将各监测子河道对应各障碍物图像中各障碍物子图像中心像素点的纹理特征值进行均值计算,进而得出各监测子河道对应的各障碍物图像的纹理特征值,并将各监测子河道对应的各障碍物图像的纹理特征值与数据库存储的各河道漂浮物名称对应的纹理特征值区间进行比对,由此得到各监测子河道对应的各障碍物名称,由此得到各监测子河道中对应各障碍物的类别。
25、作为优选方案,所述分析得出各监测子河道中对应各障碍物的实际面积,具体分析过程包括以下步骤:
26、r1、根据各监测子河道对应的图像信息,从中提取出各监测子河道对应的各障碍物图像对应的拍摄高度和拍摄角度;
27、r2、并将各监测子河道对应的各障碍物图像导入各监测子河道对应的拍摄图像中,即可得出各监测子河道对应的各障碍物图像的面积以及各监测子河道对应的各障碍物图像在各监测子河道对应的拍摄图像中的占比,并将其分别记为和;
28、r3、依据分析公式,计算得出各监测子河道中对应各障碍物的实际面积,其中,表示为第h监测子河道对应第p障碍物图像的拍摄角度,表示为第h监测子河道对应第p障碍物图像的拍摄高度。
29、作为优选方案,所述筛选得出各预警子河道,具体筛选过程包括以下步骤:
30、将各监测子河道中对应各障碍物的实际面积与数据库存储的河道许可障碍物面积进行比对,若某监测子河道中对应某障碍物的实际面积大于河道许可障碍物面积,则将该监测子河道记为预警子河道,由此筛选得出各预警子河道。
31、作为优选方案,所述各预警子河道对应的信息包括位置、各障碍物对应的面积和类别。
32、作为优选方案,所述该系统还包括数据库,用于存储河道许可障碍物面积和参考清晰图像的最佳明暗度,还用于存储各河道漂浮物名称对应的纹理特征值区间。
33、本发明的有益效果:
34、本发明提供的基于语义式图像处理的河道漂浮物识别系统,通过获取各监测子河道对应的图像信息,分析得出各监测子河道对应的障碍物信息和各障碍物对应的类别,进而分析各监测子河道中对应各障碍物的实际面积,进而筛选得出各预警子河道并进行预警处理,有效的解决了当前技术对河道漂浮障碍物识别还存在一定局限性的问题,在一定程度上提升了河道漂浮障碍物的精准识别准确度,提高了河道漂浮障碍物分析结果的稳定性,降低了适用场景的局限性,同时还能为后续河道障碍漂浮物治理提供科学决策。
35、(2)本发明实施例通过图像分析精准识别河道障碍漂浮物,避免造成了大量人力物力的浪费,提高了巡查效率,在一定程度上降低了河道巡查的成本,提高了河道管理效率,同时还能有效的避免河道因障碍漂浮物堆积过多而导致河道堵塞的问题,提高了河道的运输能力。
- 还没有人留言评论。精彩留言会获得点赞!