一种聚档评估方法、装置、终端及计算机可读存储介质与流程
本发明涉及图像处理,特别是涉及一种聚档评估方法、装置、终端及计算机可读存储介质。
背景技术:
1、随着图像识别、视频监控技术的不断进步,大数据的应用也越来越被重视,尤其是人像聚档应用在大数据中占据着重要的地位,效果也越来越明显。为了验证产品的实用性和针对产品优化方向,我们需要对实际生产环境中的聚档效果进行统计。然而,现有的统计方法要么步骤繁琐、需要大量人力物力,要么覆盖不够齐全、统计维度不够。
技术实现思路
1、本发明主要解决的技术问题是提供一种物品检测方法、终端及计算机可读存储介质,解决现有技术中聚档效果评价不准确的问题。
2、为解决上述技术问题,本发明采用的第一个技术方案是:提供一种聚档评估方法,聚档评估方法包括:
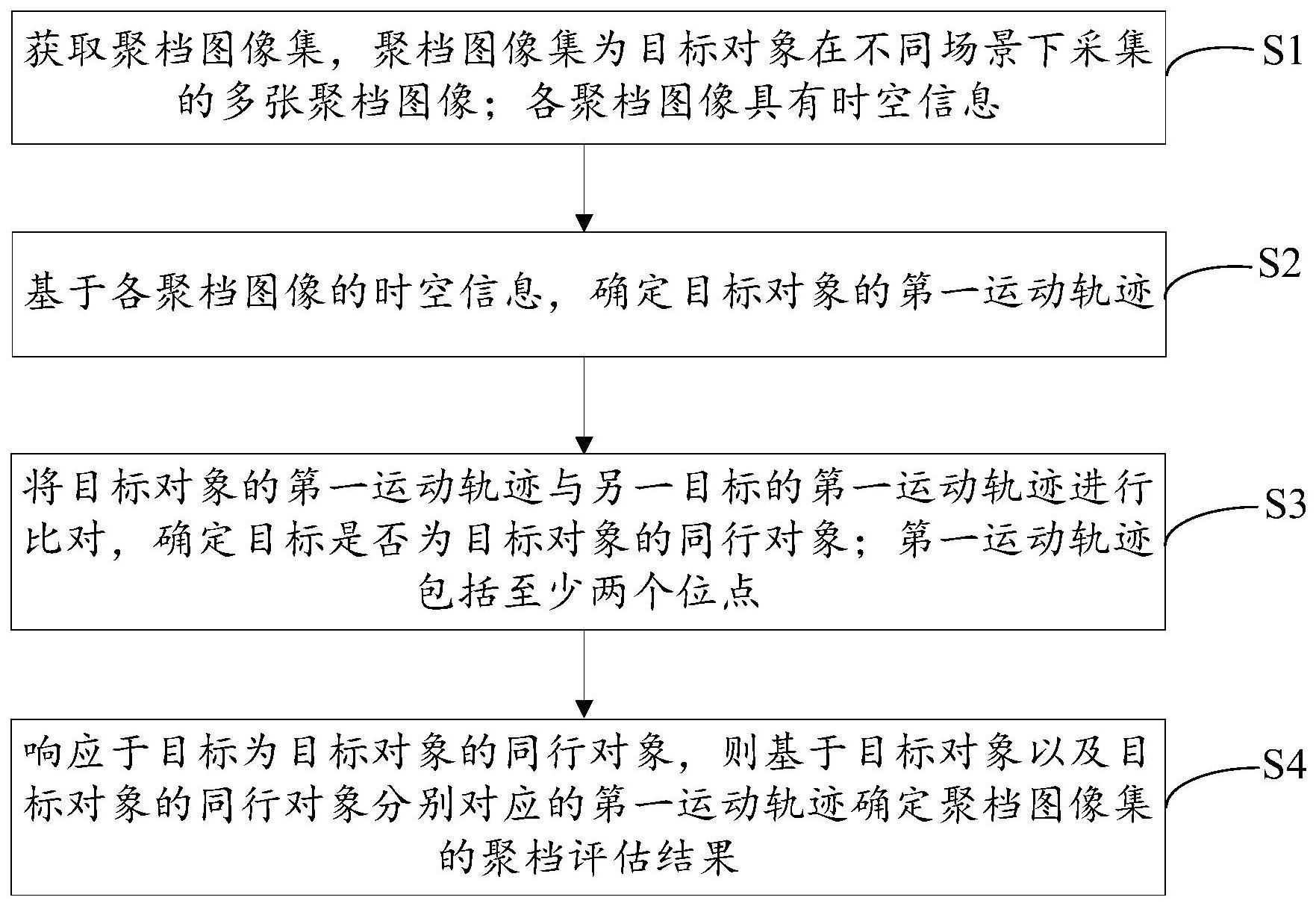
3、获取聚档图像集,聚档图像集为目标对象在不同场景下采集的多张聚档图像;各聚档图像具有时空信息;
4、基于各聚档图像的时空信息,确定目标对象的第一运动轨迹;
5、将目标对象的第一运动轨迹与另一目标的第一运动轨迹进行比对,确定目标是否为目标对象的同行对象;第一运动轨迹包括至少两个位点;
6、响应于目标为目标对象的同行对象,则基于目标对象以及目标对象的同行对象分别对应的第一运动轨迹确定聚档图像集的聚档评估结果。
7、其中,第一运动轨迹包括起始位点和结束位点,
8、将目标对象的第一运动轨迹与另一目标的第一运动轨迹进行比对,确定目标是否为目标对象的同行对象,包括:
9、将目标对象的起始位点、结束位点与目标的起始位点和结束位点进行比较;
10、响应于目标对象和目标分别对应的起始位点相同且结束位点相同,则基于目标对象的第一运动轨迹包含的位点和目标的第一运动轨迹包含的位点确定目标是否为目标对象的同行对象。
11、其中,基于目标对象的第一运动轨迹包含的位点和目标的第一运动轨迹包含的位点确定目标是否为目标对象的同行对象,包括:
12、根据目标对象的第一运动轨迹对应的位点与目标的第一运动轨迹对应的位点之间对应的交集位点数量与并集位点数量的比值,确定目标对象和目标之间的同行概率值;交集位点数量为目标对象的第一运动轨迹中位点和目标的第一运动轨迹中位点的交集对应的位点的数量;并集位点数量为目标对象的第一运动轨迹中位点和目标的第一运动轨迹中位点的并集对应的位点的数量;
13、响应于同行概率值超过概率阈值,则确定目标为目标对象的同行对象。
14、其中,基于目标对象以及目标对象的同行对象分别对应的第一运动轨迹确定聚档图像集的聚档评估结果,包括:
15、基于目标对象的第一运动轨迹以及目标对象的所有同行对象分别对应的第一运动轨迹,确定目标对象和同行对象共同对应的第二运动轨迹;第二运动轨迹对应的位点为目标对象和同行对象分别对应的第一运动轨迹中包含的所有位点的并集;
16、基于第二运动轨迹和目标对象的第一运动轨迹、目标对象的所有同行对象分别对应的第一运动轨迹,确定聚档图像集的聚档评估结果。
17、其中,基于第二运动轨迹和目标对象的第一运动轨迹、目标对象的所有同行对象分别对应的第一运动轨迹,确定聚档图像集的聚档评估结果的步骤之前,还包括:
18、基于目标对象和/或同行对象的第一运动轨迹中相邻的位点采集的聚档图像对第二运动轨迹中对应的位点进行去噪处理。
19、其中,基于目标对象和/或同行对象的第一运动轨迹中相邻的位点采集的聚档图像对第二运动轨迹中对应的位点进行去噪处理,包括:
20、遍历第二运动轨迹中的所有位点,选取一位点作为候选位点;
21、判断候选位点是否仅存在于一个第一运动轨迹中;
22、如果候选位点仅存在于一个第一运动轨迹中,则基于第一运动轨迹中候选位点采集的聚档图像的时空信息与候选位点的前一位点采集的聚档图像的时空信息确定候选位点对应的运动速度;
23、响应于候选位点的运动速度大于速度阈值,则将候选位点删除。
24、其中,聚档评估结果包括聚档正确率;
25、基于第二运动轨迹和目标对象的第一运动轨迹以及目标对象的所有同行对象分别对应的第一运动轨迹,确定聚档图像集的聚档评估结果,包括:
26、根据去噪处理得到的第二运动轨迹,确定目标对象和同行对象分别对应的噪音位点采集的聚档图像的数量;
27、基于目标对象和同行对象分别对应的噪音位点采集的聚档图像的数量,确定聚档图像集的聚档正确率。
28、其中,基于目标对象和同行对象分别对应的噪音位点采集的聚档图像的数量,确定聚档图像集的聚档正确率,包括:
29、将目标对象和目标对象的所有同行对象分别对应的噪音位点采集的聚档图像的数量进行加和,得到噪音图像数量;
30、基于噪音图像数量与目标对象和目标对象对应的所有同行对象分别对应的所有聚档图像的数量的总数量的比值,确定聚档图像集的聚档正确率。
31、其中,聚档评估结果包括聚档召回率;
32、基于第二运动轨迹和目标对象的第一运动轨迹以及目标对象的所有同行对象分别对应的第一运动轨迹,确定聚档图像集的聚档评估结果,包括:
33、响应于第二运动轨迹中的一位点为目标对象的漏拍位点,则基于目标对象的同行对象在漏拍位点采集的聚档图像确定目标对象在漏拍位点是否具有未聚档图像;
34、遍历目标对象和同行对象的漏拍位点,确定目标对象和同行对象分别对应的未聚档图像;
35、基于目标对象和同行对象分别对应的所有未聚档图像对应的漏拍位点数量、所有聚档图像对应的位点数量,确定聚档图像集的聚档召回率。
36、其中,时空信息包括抓拍时间,
37、基于目标对象的同行对象在漏拍位点采集的聚档图像确定目标对象在漏拍位点是否具有未聚档图像,包括:
38、选取一同行对象在漏拍位点采集的聚档图像;
39、基于选取的同行对象在漏拍位点采集的聚档图像的抓拍时间,选取漏拍位点在预设时段内采集的图像作为候选图像;
40、基于各候选图像与包含目标对象的图像之间的相似度,确定候选图像是否为目标对象在漏拍位点采集的未聚档图像。
41、其中,基于各候选图像与包含目标对象的图像之间的相似度,确定候选图像是否为目标对象在漏拍位点采集的未聚档图像,包括:
42、响应于候选图像与包含目标对象的图像之间的相似度超过相似度阈值,则保留相似度对应的候选图像;
43、响应于漏拍位点对应的保留的候选图像至少为两张,则选取最大的相似度对应的候选图像作为目标对象在漏拍位点采集的未聚档图像。
44、其中,基于目标对象和同行对象分别对应的所有未聚档图像对应的漏拍位点数量、所有聚档图像对应的位点数量,确定聚档图像集的聚档召回率,包括:
45、将目标对象的所有聚档图像对应的位点的数量和目标对象的所有同行对象分别对应的所有聚档图像对应的位点的数量进行加和,确定第一位点数量;
46、将目标对象的所有聚档图像对应的位点的数量、未聚档图像对应的漏拍位点的数量和目标对象的所有同行对象分别对应的所有聚档图像对应的位点的数量、未聚档图像对应的漏拍位点的数量进行加和,得到第二位点数量;
47、基于第一位点数量和第二位点数量的比值,确定聚档图像集的聚档召回率。
48、为解决上述技术问题,本发明采用的第二个技术方案是:提供一种聚档评估装置,聚档评估装置包括:
49、获取模块,用于获取聚档图像集,聚档图像集为目标对象在不同场景下采集的多张聚档图像;各聚档图像具有时空信息;
50、处理模块,用于基于各聚档图像的时空信息,确定目标对象的第一运动轨迹;
51、比对模块,用于将目标对象的第一运动轨迹与另一目标的第一运动轨迹进行比对,确定目标是否为目标对象的同行对象;第一运动轨迹包括至少两个位点;
52、分析模块,用于响应于目标为目标对象的同行对象,则基于目标对象以及目标对象的同行对象分别对应的第一运动轨迹确定聚档图像集的聚档评估结果。
53、为解决上述技术问题,本发明采用的第三个技术方案是:提供一种终端,终端包括存储器、处理器以及存储于存储器中并在处理器上运行的计算机程序,处理器用于执行程序数据以实现如上述的聚档评估方法中的步骤。
54、为解决上述技术问题,本发明采用的第四个技术方案是:提供一种计算机可读存储介质,计算机可读存储介质上存储有计算机程序,计算机程序被处理器执行时实现如上述的聚档评估方法中的步骤。
55、本发明的有益效果是:区别于现有技术的情况,提供的一种聚档评估方法、装置、终端及计算机可读存储介质,聚档评估方法包括:获取聚档图像集,聚档图像集为目标对象在不同场景下采集的多张聚档图像;各聚档图像具有时空信息;基于各聚档图像的时空信息,确定目标对象的第一运动轨迹;将目标对象的第一运动轨迹与另一目标的第一运动轨迹进行比对,确定目标是否为目标对象的同行对象;第一运动轨迹包括至少两个位点;响应于目标为目标对象的同行对象,则基于目标对象以及目标对象的同行对象分别对应的第一运动轨迹确定聚档图像集的聚档评估结果。本技术通过确定目标对象的同行对象,基于目标对象的第一运动轨迹和目标对象的所有同行对象的第一运动轨迹确定聚档图像集的聚档评价结果,可以更全面、更准确的对聚档图像集的聚档效果进行评估。
- 还没有人留言评论。精彩留言会获得点赞!