富能传感器的数据采集方法、装置、设备及介质与流程
本发明涉及多功能传感器领域,主要涉及一种富能传感器的数据采集方法、装置、设备及介质。
背景技术:
1、智慧工业、智慧农业、交通、医疗、气象等诸多应用领域均有多要素实时测量的急迫需求。当前,多要素测量主要通过以下两种方式实现:通过多个单一传感器配合测量实现多要素测量、通过多源异构传感器实现多要素测量。其中,单一传感器只能实现一种维度的信息测量,协同配合测量的成本较高、操作复杂、局限性大、难以大规模应用。多源异构传感器测量的数据间相互关联、融合、分析难度高,态势生成难,需要配套的通讯设备和特定的网络环境支持,成本较高。
技术实现思路
1、(一)要解决的技术问题
2、本发明提供一种富能传感器的数据采集方法、装置、电子设备以及存储介质,用于解决上述技术问题。
3、(二)技术方案
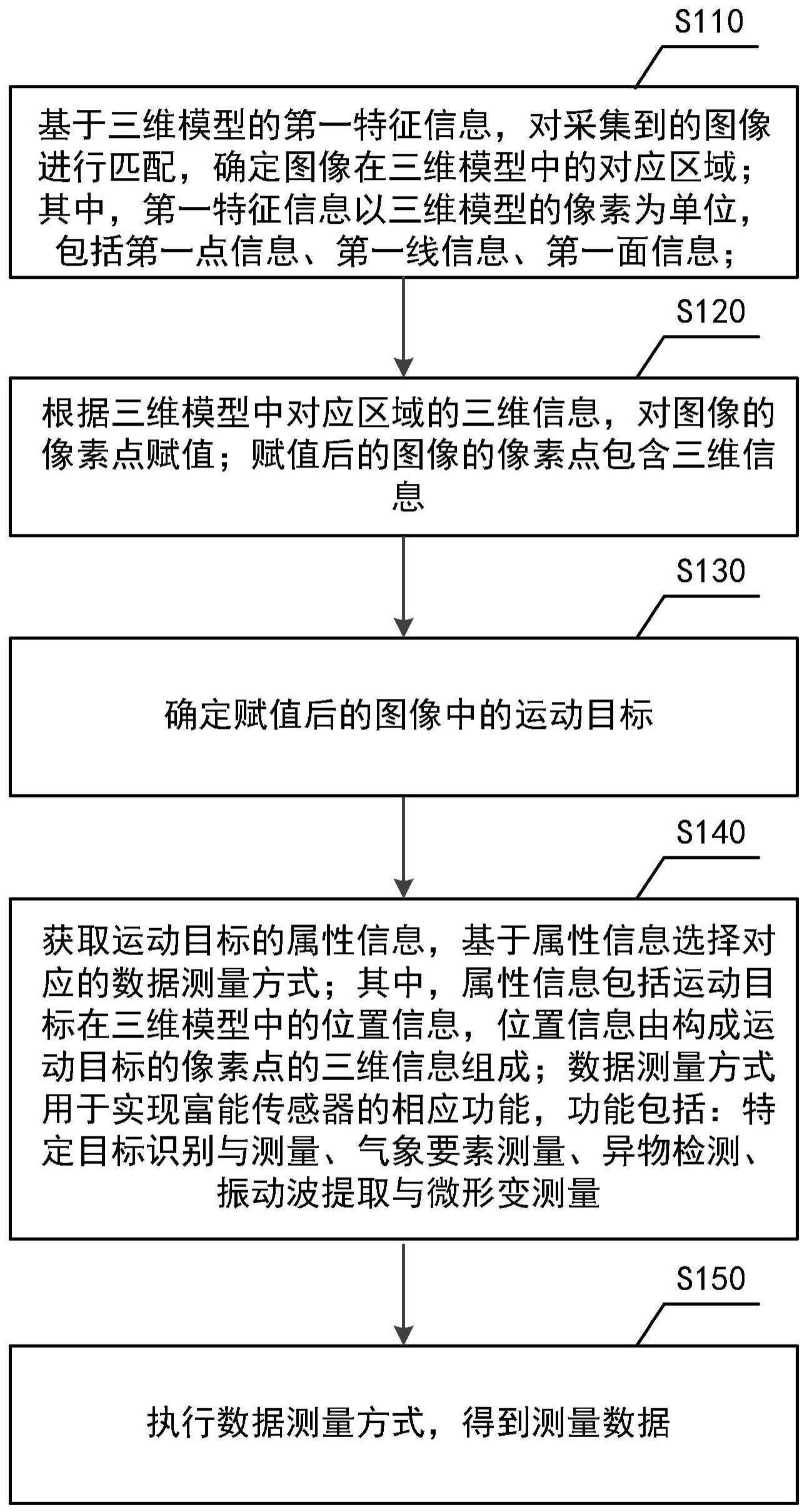
4、本发明第一方面提供一种富能传感器的数据采集方法,包括:基于三维模型的第一特征信息,对采集到的图像进行匹配,确定图像在三维模型中的对应区域;其中,第一特征信息以三维模型的像素为单位,包括第一点信息、第一线信息、第一面信息;第一点信息为模型中像素点的特征信息、第一线信息为模型中不同像素点连线的特征信息、第一面信息为模型中单一目标的特征信息;确定图像中的运动目标;获取运动目标的属性信息,基于属性信息确定数据测量方式;其中,属性信息包括所述运动目标在三维模型中的位置信息,位置信息由构成运动目标的像素点的三维信息组成;其中,所述数据测量方式用于实现富能传感器的相应功能,所述功能包括:特定目标识别与测量、气象要素测量、异物检测、振动波提取和微形变测量;执行数据测量方式,得到测量数据。
5、可选地,基于三维模型的第一特征信息,对采集到的图像进行匹配,确定图像在三维模型中的对应区域,包括:提取采集到的图像的第二特征信息;其中,第二特征信息以图像的像素为单位,包括第二点信息、第二线信息、第二面信息;第二点信息为图像中像素点的特征信息、第二线信息为图像中相邻像素点连线的特征信息、第二面信息为图像中单一目标的特征信息;根据第一特征信息和第二特征信息进行图像与三维模型间的匹配,得到匹配结果;其中,匹配结果为三维模型中与图片匹配值最高的对应区域。
6、可选地,根据第一特征信息和第二特征信息进行图像与三维模型间的匹配,得到匹配结果,包括:依次匹配第二点信息与第一点信息、第二线信息与第一线信息、第二面信息与第一面信息,得到点匹配值、线匹配值、面匹配值;计算三维模型中各区域与所述图像的匹配值;其中,所述匹配值是对点匹配值、线匹配值、面匹配值进行平均值运算得到的;将匹配值最高的区域确定为匹配结果。
7、可选地,在判断图像中的运动目标前,还包括:基于语义分割对图像内容进行分类,得到多个分类目标;其中,基于语义分割确定图像内容进行分类,包括:对图片像素进行特征提取,得到第一特征图;特征图中每一像素都具有对应的真值标签,真值标签用于记载像素的语义信息;基于真值标签对所述第一特征图进行归一化处理,得到第二特征图;根据第二特征图中每一像素的真值标签,确定该像素所属语义类别;根据所属语义类别进行特征图通道分组,确定特征组;基于特征组,得到多个目标;其中,每一目标的像素包括语义信息。
8、可选地,基于语义分割确定图像内容进行分类,得到多个目标,还包括:基于三维模型,为目标的每一像素赋值,赋值后的像素包含三维信息;其中,三维信息与三维模型中的三维空间矢量信息一致。
9、可选地,判断图像中的运动目标,包括:对连续采集的图像中对应的像素值执行相减操作,得到相减后的图像;基于设定的阈值对相减后的图像进行像素提取,得到运动目标;和/或将当前采集的图像与背景图像进行差分运算,得到运动目标区域的灰度图;基于设定的阈值提取灰度图中的运动区域,得到运动目标;其中,背景图像根据当前采集的图像进行更新。
10、可选地,获取运动目标的属性信息,基于运动目标信息确定数据测量方式,包括:建立运动目标与固定目标的耦合关系;根据运动目标的语义信息和三维信息,获取运动目标的属性信息;其中,运动目标的属性信息包括运动目标的形状、位置、运动参数。
11、本发明第二方面提供一种数据采集装置,包括:匹配模块,用于基于三维模型的第一特征信息,对采集到的图像进行匹配,确定图像在三维模型中的对应区域;其中,第一特征信息以三维模型的像素为单位,包括第一点信息、第一线信息、第一面信息;第一点信息为模型中像素点的特征信息、第一线信息为模型中不同像素点连线的特征信息、第一面信息为模型中单一目标的特征信息;赋值模块,用于根据三维模型中对应区域的三维信息,对图像的像素点赋值;赋值后的图像的像素点包含三维信息;确定模块,用于确定图像中的运动目标;功能选择模块,用于获取运动目标的属性信息,基于属性信息选择对应的数据测量方式;其中,属性信息包括运动目标在三维模型中的位置信息,位置信息由构成运动目标的像素点的三维信息组成;所述数据测量方式用于实现富能传感器的相应功能,所述功能包括:特定目标识别与测量、气象要素测量、异物检测、振动波提取和微形变测量;测量模块,用于执行数据测量方式,得到测量数据。
12、本发明第三方面提供一种电子设备,包括:存储器,处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时,实现权利要求1至8中的任一项所述的数据采集方法中的各个步骤。
13、本发明第四方面提供一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时,实现权利要求1至8中的任一项所述的数据采集方法中的各个步骤。
14、(三)有益效果
15、本发明提供的富能传感器的数据采集方法、装置、设备以及介质至少包括以下有益效果:
16、通过点信息、线信息、面信息三个维度对采集到的图像进行匹配,有效提高特征匹配的准确性,实现图像与三维模型对应区域的精准配对,进而提高后续测量数据与三维模型区域的精准配对;
17、通过运动目标的识别进行数据测量方式的选择,基于数据测量方式的选择,启动富能传感器中对应的探测器,实现富能传感器对多要素的实时测量,提高富能传感器应用场景的广泛性和可扩展性。
技术特征:
1.一种富能传感器的数据采集方法,其特征在于,包括:
2.根据权利要求1所述的数据采集方法,其特征在于,所述基于三维模型的第一特征信息,对采集到的图像进行匹配,确定所述图像在三维模型中的对应区域,包括:
3.根据权利要求2所述的数据采集方法,其特征在于,所述根据第一特征信息和第二特征信息进行图像与三维模型间的匹配,得到匹配结果,包括:
4.根据权利要求2所述的数据采集方法,其特征在于,由压缩后的神经网络进行特征信息的提取,其中,所述神经网络的压缩方法包括:
5.根据权利要求1所述的数据采集方法,其特征在于,在判断所述图像中的运动目标前,还包括:
6.根据权利要求1所述的数据采集方法,其特征在于,所述确定所述图像中的运动目标,包括:
7.根据权利要求1所述的数据采集方法,其特征在于,所述获取所述运动目标的属性信息,基于所述运动目标信息确定数据测量方式,包括:
8.一种数据采集装置,其特征在于,包括:
9.一种电子设备,包括:存储器,处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时,实现权利要求1至8中的任一项所述的数据采集方法中的各个步骤。
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时,实现权利要求1至8中的任一项所述的数据采集方法中的各个步骤。
技术总结
本发明提供一种富能传感器的数据采集方法、装置、电子设备及介质,该数据采集方法,包括:基于三维模型的第一特征信息,对采集到的图像进行匹配,确定图像在三维模型中的对应区域,实现像素注册;其中,第一特征信息以三维模型的像素为单位,包括第一点信息、第一线信息、第一面信息;根据三维模型中对应区域的三维信息,对图像的像素点赋值;赋值后的图像的像素点包含三维信息;确定图像中的运动目标;获取运动目标的属性信息,基于属性信息选择对应的数据测量方式;其中,数据测量方式用于实现富能传感器的相应功能,包括:特定目标识别与测量、气象要素测量、异物检测、振动波提取和微形变测量;执行数据测量方式,得到测量数据。
技术研发人员:张泽,梁锦超,于闳飞,王爱强,邱赛,张绍,陈永超
受保护的技术使用者:齐鲁空天信息研究院
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!