一种悬空波导空间分布的预测方法
本发明属于气象时空预测领域,尤其涉及一种悬空波导空间分布的预测方法。
背景技术:
1、在海上,悬空波导是除了蒸发波导之外,最常见的一种大气波导,是由于对流层中存在逆温或水汽随高度急剧变小而形成的大气层结。电磁波在悬空波导陷获层中传播时,在底部和顶部边界处多次反射,使得电磁波能够实现超视距传播,同时也会在悬空波导陷获层的顶层上方和底层下方形成雷达探测盲区。若要实现超视距传播,则电磁波发射源的位置必须接近悬空波导陷获层。而且悬空波导陷获层的顶层上方和底层下方形成的雷达探测盲区可以被利用来隐藏我方关键目标。为实现超视距传播并定位探测盲区,准确识别悬空波导在大气中的分布以及掌握其陷获层的底高、顶高至关重要。
2、目前,获得悬空波导高度的方法主要包括直接检测和间接检测两种方法,由于直接检测只能得到单点的波导信息,因此间接检测方法是悬空波导最常用的检测方法。反演方法是经典的间接检测方法,该方法以卫星反演的海表温压湿、云顶温度、温压湿气象要素为输入,通过各种近似、参数化方案和物理统计模型,计算得到悬空波导。为提前感知悬空波导的空间分布,需以直接检测和间接检测所获得的数据为基础,对未来的悬空波导空间分布演进情况进行预测分析。
3、但是,悬空波导的顶高、底高均为一种三维时空数据,且顶高和底高相互制约,不能直接被现有处理气象二维时空数据的时空预测模型所处理。
技术实现思路
1、本发明所要解决的技术问题是:提出一种悬空波导空间分布的预测方法,利用深度学习技术以低成本的方式实现对悬空波导空间分布的准确预测,并解决悬空波导的顶高、底高不能被现有处理气象二维时空数据的时空预测模型所处理的问题。
2、本发明解决上述技术问题采用的技术方案是:
3、一种悬空波导空间分布的预测方法,包括以下步骤:
4、s1、获取目标区域的悬空波导数据,所述目标区域为完整覆盖对应悬空波导的区域,所述悬空波导数据包括顶高、底高、经度、纬度和时间;将所述悬空波导数据,分解转化为两个二维时序数据;所述二维时序数据为一组二维数据按时间先后进行排序所构成的序列,所述二维数据呈网格状,其二维为经度和纬度,并由对应的表征顶高或底高的数据构成二维数据中各经度和纬度位置处的特征,且所述两个二维时序数据的特征分别表征顶高和底高;
5、s2、针对各个特征,分别根据目标区域的待预测时间点t,构建对应该特征的时空时序数据,所述时空时序数据包括n个按时间排序并位于待预测时间点t之前的时空数据,所述n为预设的数量,且n为大于2的整数;并按如下步骤,获得所述时空时序数据:
6、首先,从对应该时空时序数据的特征的二维时序数据中,提取待预测时间点t之前的m*n个连续时间点的二维数据,且m为大于等于2的整数;
7、然后,对m*n个二维数据,划分为n个时间段,每个时间段对应一个聚合组,每个聚合组分别包含m个连续时间点的二维数据;
8、再然后,针对各聚合组,分别按如下公式进行聚合,获得所述时空时序数据的各时空数据:
9、
10、其中,f(xi,yj,tn)表示时空时序数据中时间点为tn的时空数据的位置(xi,yj)处的特征,xi和yj分别表示该特征所在位置的经度和纬度,i和j分别为该位置在目标区域中沿x轴的序号和沿y轴的序号,tn表示时空数据所在的时间点,n为该时空数据在时空时序数据中的序号;wm和wqp分别为权重参数;qm和pm分别表示第m个二维数据中对应位置(xi,yj)的聚合区域沿x轴的数量和沿y轴的数量,m表示该二维数据在聚合组中的序号,且聚合组中m个二维数据的聚合区域的中心均为(xi,yj),h(xq,yp,tn-m)表示第m个二维数据的聚合区域中位置(xq,yp)处的特征,对于聚合区域超出目标区域的部分,其经度和纬度按网格的间距填充、特征以目标区域边缘部分复制填充;
11、s3、将步骤s2获得的各特征的时空时序数据,输入相互独立并分别对应各特征的时空预测网络,对各特征进行预测,获得目标区域在待预测时间点的顶高和底高的预测值。
12、进一步的,采用厚度表征顶高,所述厚度为相同时间相同位置处的顶高和底高之差;
13、在步骤s1中,所述两个二维时序数据的特征分别为底高和厚度;
14、在步骤s3中,首先,通过相互独立并分别对应底高和厚度的时空预测网络,对底高和厚度进行预测,获得目标区域在待预测时间点的底高和厚度的预测值;然后,根据底高和厚度的预测值,计算获得目标区域在待预测时间点的顶高的预测值。
15、进一步的,根据底高和厚度的预测值,按如下公式,计算获得目标区域在待预测时间点t的顶高的预测值:
16、
17、
18、其中,表示待预测时间点t的位置(xi,yj)处的顶高,表示待预测时间点t的位置(xi,yj)处的底高,表示待预测时间点t的位置(xi,yj)处的厚度,xi和yj分别表示位置的经度和纬度,i和j分别为该位置在目标区域中沿x轴的序号和沿y轴的序号。
19、进一步的,步骤s2中,聚合组中m个二维数据的聚合区域,按时间先后,距离对应时空数据的时间点tn的时间差越大则聚合区域越大。
20、进一步的,所述各聚合区域对应(xi,yj)处的权重参数wqp,随距离对应时空数据的时间点tn的时间差的增加而递增,并满足0<wqp<1且所述聚合区域的权重参数wm,随距离对应时空数据的时间点tn的时间差的增加而递减,并满足0<wm<1且
21、进一步的,所述n和m设定为3;聚合组中m个二维数据的聚合区域,按距离对应时空数据的时间点tn的时间差由小到大,聚合区域分别设置为3×3、5×5、7×7;
22、且,聚合区域3×3、5×5、7×7的权重参数wqp分别设置为:
23、
24、
25、
26、聚合区域3×3、5×5、7×7的权重参数wm分别设定为:1/2、1/3和1/6。
27、进一步的,针对各特征的时空预测网络,分别按如下步骤进行训练:
28、a1、获取样本数据并按步骤s1的方式进行数据预处理,获得包含对应特征的二维时序数据;
29、a2、从步骤a1获得的二维时序数据中,选择一个时间点作为待预测时间,并将该时间点的二维数据作为对应特征的真实值;按步骤s2的方式,构建该特征的时空时序数据;
30、a3、将步骤a2获得的时空时序数据,输入时空预测网络,获得对应特征的预测值;
31、a4、基于对应特征的真实值和预测值,进行损失计算;
32、a5、重复步骤a2~a4,直至模型收敛,获得对应特征的完成训练的时空预测网络。
33、进一步的,在训练阶段,将获取的样本数据,按比例划分为训练集、验证集和测试集,其中,训练集用于训练模型拟合参数,验证集用于确定网络结构拟合超参数,测试集用于评估最终模型的性能;
34、在采用训练集进行训练时,采用如下所示的smoothl1loss损失函数,进行损失计算:
35、
36、在采用验证集进行验证时,采用如下所示的l2loss损失函数,进行损失计算:
37、
38、其中,i和j分别表示目标区域沿x轴的位置数量和沿y轴的位置数量,i和j分别表示沿x轴的位置序号和沿y轴的位置序号,表示模型对位置(xi,yj)处对应特征的预测值,y表示位置(xi,yj)处对应特征的真实值。
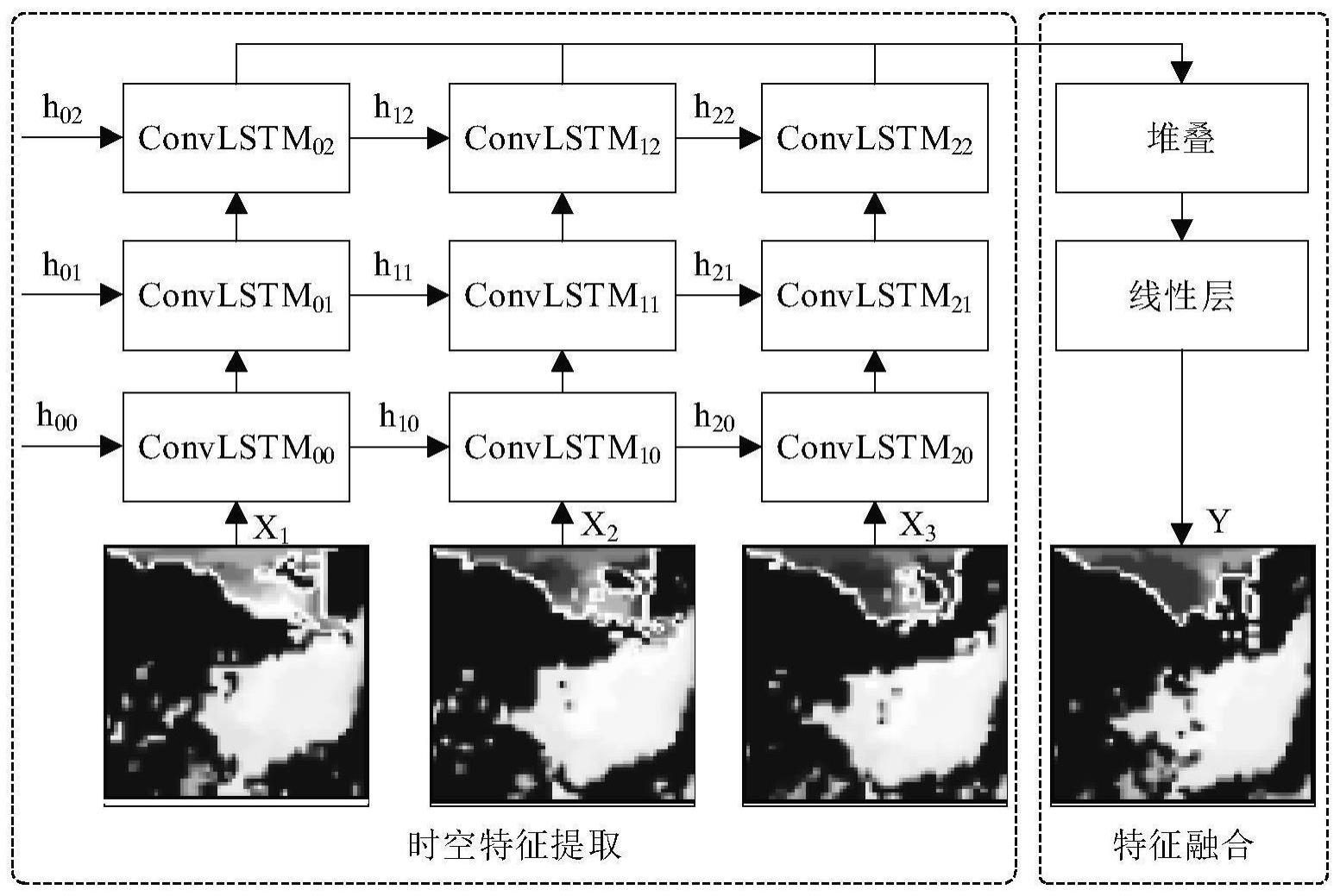
39、进一步的,所述时空预测网络为n层的convlstm网络,且每层包括堆叠的l个convlstm模块;在步骤s3中,将时空时序数据中的n个时空数据,按顺序输入convlstm网络的n层,并分别经过堆叠的l个convlstm模块,得到n个时空数据的隐藏层特征;然后,将得到n个隐藏层特征进行堆叠,再通过线性层进行融合,获得最终的预测值。
40、进一步的,所述convlstm模块包括convlstm子模块和自注意力子模块;所述convlstm模块以convlstm子模块输出的特征向量作为其输出的特征向量,并以convlstm子模块输出的隐藏层特征,在经过自注意力子模块处理后,所获得结果作为其输出的隐藏层特征。
41、进一步的,所述convlstm子模块的公式如下:
42、
43、
44、
45、
46、
47、其中,x为convlstm子模块的输入特征,初始时为时空数据,之后为c表示convlstm子模块输出的特征向量,h表示convlstm子模块输出的隐藏层特征,h表示经自注意力子模块处理后所获得的隐藏层特征;下标n表示其位于n层convlstm网络中的第n层,上标l表示其位于第n层中堆叠的l个convlstm模块中的第l个;*表示卷积运算,表示hadamard乘法,σ表示激活函数,wx1、wx2、wx3、wx4、wh1、wh2、wh3、wh4、wc1、wc2和wc3均为可学习权重,b1、b2、b3和b4均为可学习偏置;
48、所述自注意力子模块的公式如下:
49、
50、
51、
52、
53、其中,wq、wk和wv分别表示卷积滤波器。
54、本发明的有益效果是:
55、本发明基于悬空波导的物理特性,将三维的时空数据进行维度切割,并在不同的历史时刻设置不同的感受野,将不同历史时刻的数据进行融合,获得二维的时空数据,使其适配现有处理气象二维时空数据的时空预测模型,以低成本的方式实现,根据目标区域历史悬空波导的空间分布数据,对目标区域在预测时间点的悬空波导的底高、顶高的准确预测,从而更加真实地反映出悬空波导在预测时间点的空间分布。
- 还没有人留言评论。精彩留言会获得点赞!