一种基于量块垂直边线的摄像机标定方法
本发明属于摄影测量技术,具体涉及一种基于量块垂直边线的摄像机标定方法。
背景技术:
1、摄像机的标定精度直接关系到光栅投影测量系统的精度,提高摄像机标定的精度是光栅投影系统需要解决的关键问题之一,目前主流的摄像机标定法为张正友平面模板法,张正友提出将世界坐标系和摄像机坐标系重合,减少了摄像机标定参数,该方法利用一条长度已知的直线,绕固定点做运动,利用直线运动的约束关系对摄像机进行标定,但该方法需要精确提取直线上点的坐标,提取直线上点的坐标步骤过于繁琐且难度较大,不利于操作;
2、因此亟需设计一种基于量块垂直边线的摄像机标定方法,以解决上述问题。
技术实现思路
1、针对上述现有技术存在的缺陷,本发明的目的在于提供一种基于量块垂直边线的摄像机标定方法,该方法包括:步骤1:将摄像机坐标系与世界坐标系重合;步骤2:将量块放置在标定平面上,固定摄像机,翻转量块不同面,并拍摄多幅量块标定图;步骤3:利用sobel算子检测量块边线边缘,再利用最小二乘拟合得到直线,通过得到的直线检测标定图中垂直边线的交点,进而获取这些交点的世界坐标和图像坐标;步骤4:在获取交点的世界坐标和图像坐标的基础上,利用闭式解计算出摄像机的内部参数;步骤5:结合摄像机的内参数,并采用畸变校正模型,求得畸变系数;步骤6:根据最大似然准则用算法通过最小化式优化所有的摄像机参数;使用该方法减少了摄像机标定参数,原理简单,且有效标定了摄像机,且有较好的精度,适合光栅投影测量系统使用。
2、为了实现上述目的,本发明所采用的技术方案如下:
3、基于量块垂直边线的摄像机标定方法,其特征在于:包括
4、步骤1:将摄像机坐标系与世界坐标系重合;
5、步骤2:将量块放置在标定平面上,固定摄像机,手动翻转量块不同面,并拍摄最少5幅量块标定图;
6、步骤3:利用sobel算子检测标定图中的量块边线边缘,再利用最小二乘拟合得到直线,通过得到的直线检测标定图中垂直边线的交点,进而获取交点的世界坐标和图像坐标;
7、步骤4:在获取交点的世界坐标和图像坐标的基础上,利用闭式解计算出摄像机的内参数;
8、步骤5:结合摄像机的内参数,并采用畸变校正模型,求得摄像机的畸变系数;
9、步骤6:根据最大似然准则用算法通过最小化式优化所有的摄像机参数。
10、优选地,步骤1中摄像机坐标系与世界坐标系重合的具体步骤为:
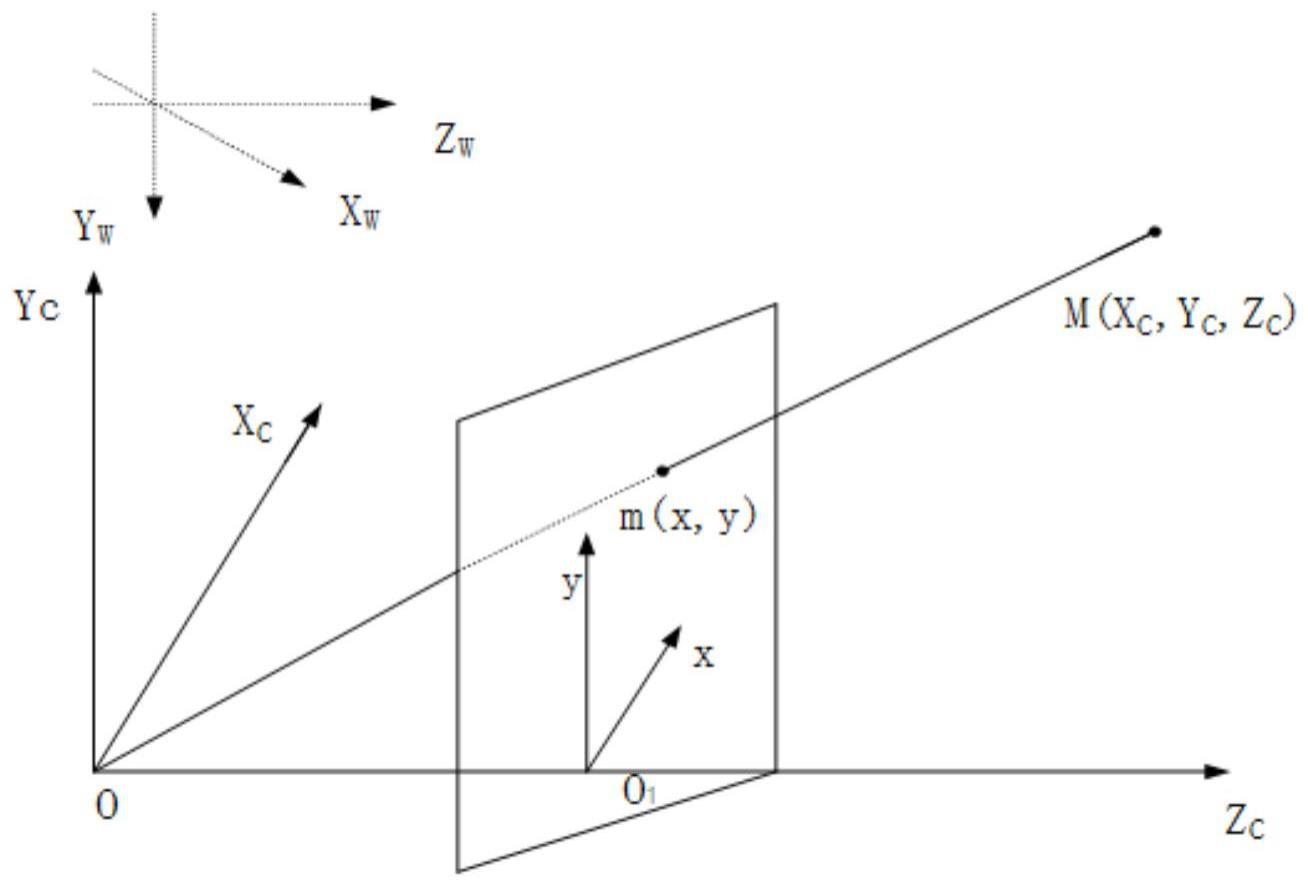
11、(1)记像素点m在计算机图像坐标为(u,v),其次坐标为(u,v,1),在像平面坐标系下的坐标为(x,y),其次坐标为(x,y,1),对应的空间点m,其世界坐标为(xw,xw,xw),其次坐标为(xw,xw,xw,1),在摄像机坐标系中对应点坐标为mc,记坐标为(xc,yc,zc),其次坐标为(xc,yc,zc,1),根据针孔模型原理,得到计算机图像像素点和像平面坐标之间的关系;
12、
13、其中,(u0,v0)为图像主点的坐标,μx和μy为每一个像素在u轴和v轴上的物理尺寸,s为像平面坐标和光轴与完全垂直所差的倾斜度;
14、(2)根据针孔模型,摄像机和像平面坐标系之间的关系有下列转化关系:
15、
16、(3)m点的世界坐标和摄像机坐标其次转换关系为:
17、
18、r和t为外部参数,分别为空间点的世界坐标到摄像机坐标的旋转和平移变换参数;
19、(4)根据式(1)、(2)和(3),得到图像像素点坐标和对应的空间点世界坐标的其次变换为:
20、
21、sc为任意比例因子,a为摄像机内参矩阵。
22、优选地,步骤4中的摄像机内参数包括:图像坐标系u轴的标量因子α、图像坐标系v轴的标量因子β、u轴和v轴之间的倾斜因子s、图像主点的坐标(u0,v0),该内参数的计算步骤为:
23、(1)计算摄像机的内参矩阵a;
24、(2)根据a的结果,再采用闭式解计算出α、β、s、u0、v0。
25、优选地,a的具体计算过程为:
26、采用摄像机成像模型,将步骤1中的空间点m和像素点m写成下式的关系:
27、scm=a[rt]m
28、其中m=[u,v,1]和m=(xw,yw,zw,1)分别表示m和m的其次坐标,sc是任意的标量因子,r和t表示世界坐标和摄像机坐标之间的旋转变换转换和平移变换关系,a是摄像机的内参矩阵,其中(u0,v0)是主点的坐标,α和β图像坐标系u轴和v轴的标量因子,s是u轴和v轴之间的倾斜因子;
29、将标定板上点的zw设置为0,步骤1中的(4)式写成下式的形式:
30、
31、ri表示旋转矩阵r的第i列,为不失一般性,m=(u,v)和m=(u,v,1)表示空间点的图像坐标及其齐次坐标,m=(xw,yw)和m=(xw,yw,1)表示空间点的坐标系和其次坐标系,则图像平面上的点m和平面模板上的点m用单应性矩阵来联系:
32、
33、h表示成h=[h1,h2,h3],则:
34、(h1 h2 h3)=λa(r1 r2 t)
35、因为r1和r2正交,即得到单应性矩阵内参的两个基本约束条件:
36、h1ta-ta-1h2=0
37、h1ta-ta-1h1=h2ta-ta-1h2=0
38、单应性矩阵的自由度为8,外参数为六个,其中,3个属于旋转,3个属于平移,对于摄像机内参,只能获得有且仅有两个向量,令:
39、
40、优选地,采用闭式解计算出α、β、s、u0、v0,具体计算过程为:
41、因为b是个对称矩阵,即将b表示为:
42、b=[b11,b12,b22,b13,b23,b33]t
43、
44、记:
45、v=[h1h1,h2h1+h1h2,h2h2b22,
46、h3h1+h1h3,h3h3,h3h2+h2h3]
47、x=sp2b=[x1,x2,x3,x4,x5,x6]t
48、v=[v1,v2,v3,…vn]t
49、则:
50、vx=0
51、拍摄n幅量块标定图,即得到n个类似于vx=0的方程,进而解出x,
52、最终可以得到摄像机的内部参数为:
53、v0=(x2x3-x1x5)/(x1x4-x22)
54、
55、
56、
57、u0=γv0/α-x4α2/s
58、其中:γ=-x2α2β/s。
59、优选地,步骤5中畸变校正模型包括正切向畸变和径向畸变的纠正,畸变系数包括k1、k2、p1和p2,其中k1和k2是径向畸变的系数,p1和p2切向畸变的系数。
60、优选地,记(x,y)是理想无失真归一化的像平面标,(x,y)是真实的归一化的像平面坐标,则径向畸变模型为:
61、
62、
63、切向畸变模型为:
64、
65、优选地,步骤6中的最小化式为:其中,是空间点mj在第i幅图像上对应像点的图像坐标,a和{ri,ti|i=1,…,n}的初始值采用步骤4中的闭式解的计算方法获得。
66、本发明的有益效果是:本发明公开了一种基于量块垂直边线的摄像机标定方法,与现有技术相比,本发明的改进之处在于:
67、(1)本发明在张正友平面模板标定法的基础上提出一种基于量块垂直边线的摄像机标定方法,从而减少摄像机标定参数,且利用量块边线固有的垂直关系对摄像机进行标定,该方法操作简单、有较好的实用性,适用于光栅投影测量系统,用来提高摄像机标定的精度。
68、(2)张正友平面模板标定法中仅校正径向畸变,本发明则是同时对正切向畸变和径向畸变进行畸变校正,使得摄像机标定更为准确。
- 还没有人留言评论。精彩留言会获得点赞!